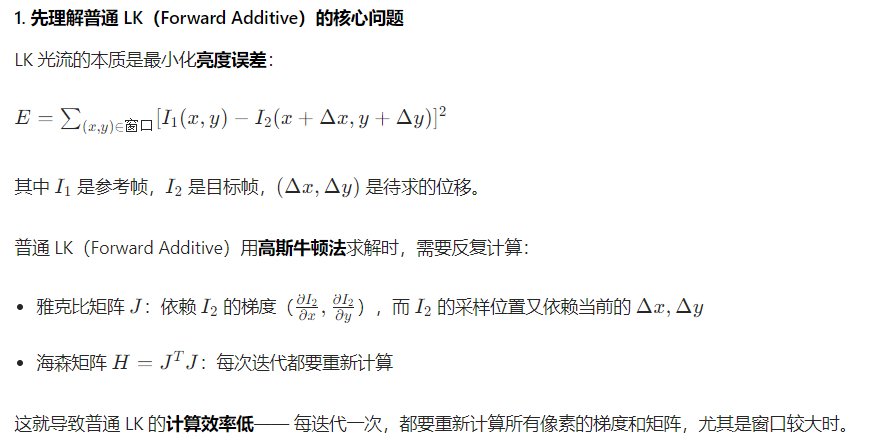
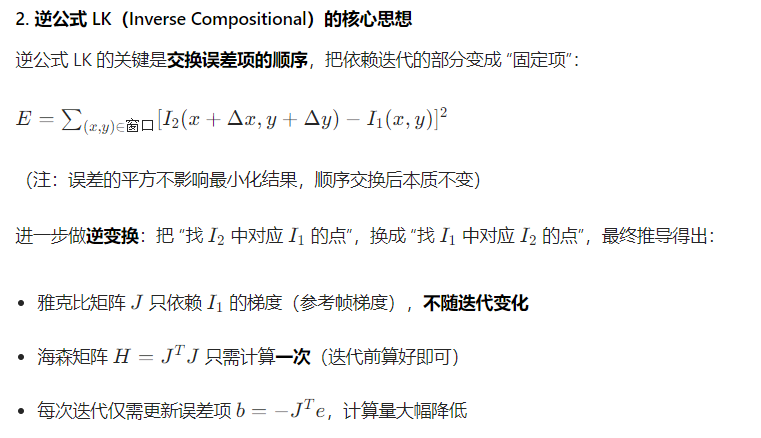
光流法中逆公式的理解
关键代码解读
点击查看代码
if (inverse == false) {
// 普通LK:每次迭代重置H和b(H随迭代变)
H = Eigen::Matrix2d::Zero();
b = Eigen::Vector2d::Zero();
} else {
// 逆公式LK:仅重置b,H只算一次(iter==0时)
b = Eigen::Vector2d::Zero();
}
// 雅克比矩阵计算
if (inverse == false) {
// 普通LK:J依赖I2的梯度(目标帧,随dx/dy变)
J = -1.0 * Eigen::Vector2d(
0.5 * (GetPixelValue(img2, kp.pt.x + dx + x + 1, kp.pt.y + dy + y) -
GetPixelValue(img2, kp.pt.x + dx + x - 1, kp.pt.y + dy + y)),
0.5 * (GetPixelValue(img2, kp.pt.x + dx + x, kp.pt.y + dy + y + 1) -
GetPixelValue(img2, kp.pt.x + dx + x, kp.pt.y + dy + y - 1))
);
} else if (iter == 0) {
// 逆公式LK:J仅在第0次迭代算(依赖I1的梯度,固定)
J = -1.0 * Eigen::Vector2d(
0.5 * (GetPixelValue(img1, kp.pt.x + x + 1, kp.pt.y + y) -
GetPixelValue(img1, kp.pt.x + x - 1, kp.pt.y + y)),
0.5 * (GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y + 1) -
GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y - 1))
);
}
// H的更新逻辑
if (inverse == false || iter == 0) {
H += J * J.transpose(); // 逆公式仅iter==0时更新H
}
总结
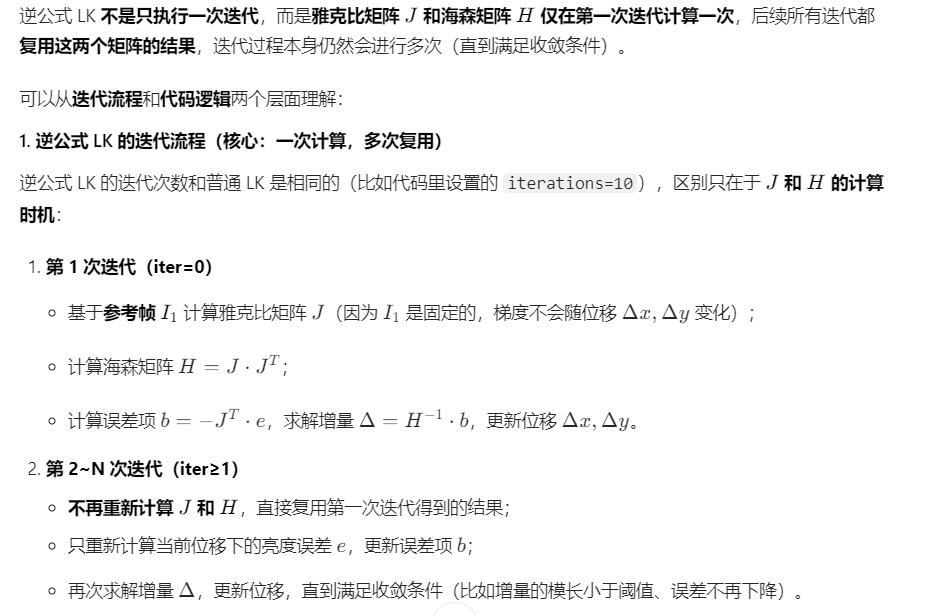
逆公式 LK 的核心优势:将梯度计算固定在参考帧上,海森矩阵只需计算一次,迭代效率远高于普通 LK;
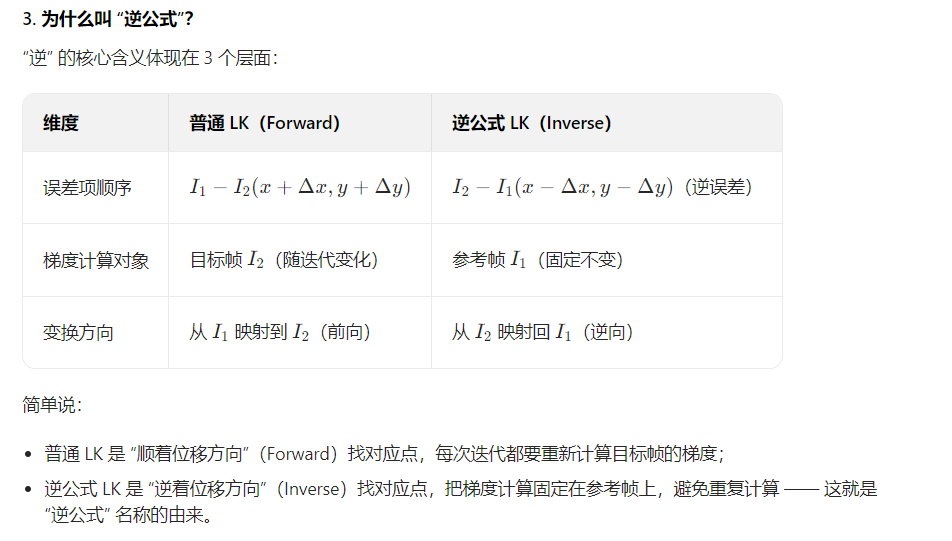
“逆” 的本质:误差项逆序、变换方向逆置、梯度计算对象从目标帧逆转为参考帧;
代码体现:逆公式模式下,H 仅在第一次迭代计算,J 基于参考帧 img1 而非目标帧 img2,大幅减少重复计算。
点击查看代码
// 雅克比矩阵 J 的计算逻辑
if (inverse == false) {
// 普通LK:每次迭代都基于 I2 重新算 J
J = ... // 依赖 img2 和当前 dx/dy
} else if (iter == 0) {
// 逆公式LK:仅在第一次迭代算 J,后续迭代跳过
J = ... // 仅依赖 img1,和 dx/dy 无关
}
// 海森矩阵 H 的更新逻辑
if (inverse == false || iter == 0) {
// 普通LK:每次迭代更新 H;逆公式LK:仅第一次迭代更新 H
H += J * J.transpose();
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号