迭代最近点 ICP(Iterative Closest Point)算法
是计算机视觉 / 机器人领域中用于求解两组 3D 点集间最优刚体变换(旋转 + 平移) 的经典算法。
简单来说:给定两组对应(或近似对应)的 3D 点集(比如 RGB-D 相机不同帧的 3D 点、激光扫描的点云),ICP 通过迭代方式找到一个旋转矩阵R和平移向量t,使得其中一组点集经过R和t变换后,与另一组点集的距离误差最小。
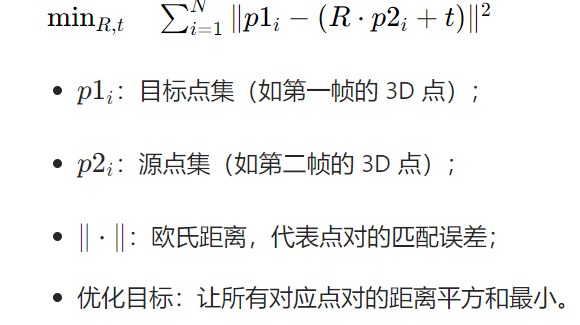
ICP 的核心目标找到最优的 R(旋转)和 t(平移),满足:
ICP 的两种核心实现方式
你代码中用到的是 SVD-ICP(解析解 ICP)(无迭代),而传统 ICP 是迭代版本,两者的核心流程对比:
传统迭代 ICP
- 点对匹配(找最近点)
- 求解 R,t(如最小二乘)→
- 变换点集
- 重复至收敛
特点:通用,但需迭代,速度较慢
SVD-ICP(解析解) - 去中心化
- 计算协方差矩阵 W
- SVD 分解求 R
- 计算 t
SVD-ICP示例代码
点击查看代码
/**
* @brief 基于SVD的ICP位姿估计具体实现
* 算法步骤:
* 1. 计算两组点的质心
* 2. 对点集进行去中心化
* 3. 计算协方差矩阵 W = sum(q1*q2^T)
* 4. SVD分解W,得到旋转矩阵R=U*V^T
* 5. 计算平移向量t = 质心1 - R*质心2
*/
void pose_estimation_3d3d(const vector<Point3f> &pts1,
const vector<Point3f> &pts2,
Mat &R, Mat &t) {
// 计算两组点的质心
Point3f p1, p2;
int N = pts1.size();
for (int i = 0; i < N; i++) {
p1 += pts1[i];
p2 += pts2[i];
}
// 质心坐标 = 所有点的平均值
p1 = Point3f(Vec3f(p1) / N);
p2 = Point3f(Vec3f(p2) / N);
// 去中心化:每个点减去质心
vector<Point3f> q1(N), q2(N);
for (int i = 0; i < N; i++) {
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
// 计算协方差矩阵 W = sum(q1_i * q2_i^T)
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for (int i = 0; i < N; i++) {
// 将OpenCV的Point3f转换为Eigen的Vector3d
Eigen::Vector3d v1(q1[i].x, q1[i].y, q1[i].z);
Eigen::Vector3d v2(q2[i].x, q2[i].y, q2[i].z);
W += v1 * v2.transpose();
}
cout << "W=" << W << endl;
// 对协方差矩阵W进行SVD分解
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU(); // 左奇异矩阵
Eigen::Matrix3d V = svd.matrixV(); // 右奇异矩阵
cout << "U=" << U << endl;
cout << "V=" << V << endl;
// 计算旋转矩阵 R = U * V^T
Eigen::Matrix3d R_ = U * (V.transpose());
// 处理旋转矩阵行列式为-1的情况(保证旋转矩阵为正交矩阵)
if (R_.determinant() < 0) {
R_ = -R_;
}
// 计算平移向量 t = p1 - R*p2
Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z);
// 将Eigen矩阵转换为OpenCV的Mat类型
R = (Mat_<double>(3, 3) <<
R_(0, 0), R_(0, 1), R_(0, 2),
R_(1, 0), R_(1, 1), R_(1, 2),
R_(2, 0), R_(2, 1), R_(2, 2)
);
t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号