随笔分类 - SLAM
《SLAM十四讲》、《Numerical Optimization》、《凸优化》等学习笔记属于是
摘要: 一、概述 李群和李代数的核心思想 可以理解为专门用于矩阵旋转的东西,符合封结幺逆法则; 李群可以理解为旋转矩阵,李代数可以理解为旋转向量; 李群是连续群,李代数可以表出李群的导数,所以李代数表示的是李群的局部性质; 进而我们可以理解为:旋转向量表达了旋转矩阵的局部(旋转发生那一瞬间的领域内)性质;
阅读全文
一、概述 李群和李代数的核心思想 可以理解为专门用于矩阵旋转的东西,符合封结幺逆法则; 李群可以理解为旋转矩阵,李代数可以理解为旋转向量; 李群是连续群,李代数可以表出李群的导数,所以李代数表示的是李群的局部性质; 进而我们可以理解为:旋转向量表达了旋转矩阵的局部(旋转发生那一瞬间的领域内)性质;
阅读全文
一、概述 李群和李代数的核心思想 可以理解为专门用于矩阵旋转的东西,符合封结幺逆法则; 李群可以理解为旋转矩阵,李代数可以理解为旋转向量; 李群是连续群,李代数可以表出李群的导数,所以李代数表示的是李群的局部性质; 进而我们可以理解为:旋转向量表达了旋转矩阵的局部(旋转发生那一瞬间的领域内)性质;
阅读全文
摘要: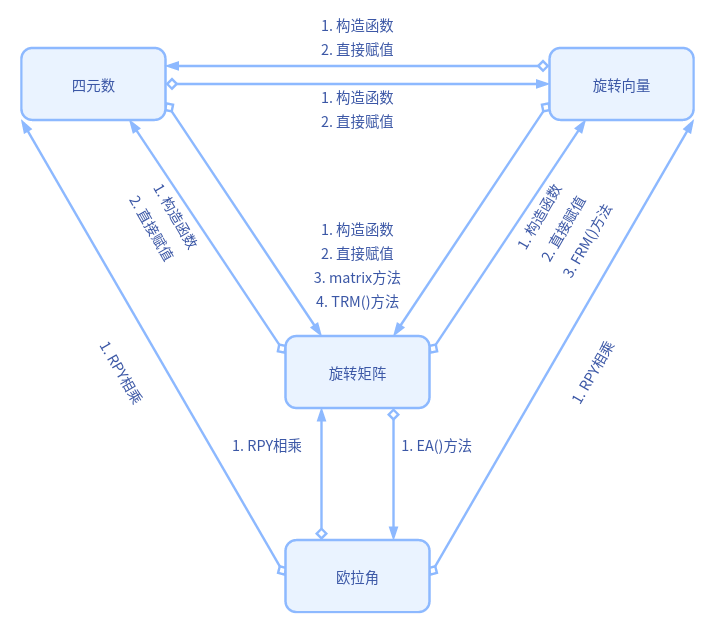 一、概述 旋转变换的核心思想 在不同坐标系下,虽然坐标不同,但是同一个向量还是一样的。这句话有点儿怪怪的,但是可以用数学公式表出:\(\beta_1^T\cdot\alpha_1=\beta_2^T\cdot\alpha_2\),其中\(\beta\)是不同坐标系的标准正交基(行分块),\(\alp
阅读全文
一、概述 旋转变换的核心思想 在不同坐标系下,虽然坐标不同,但是同一个向量还是一样的。这句话有点儿怪怪的,但是可以用数学公式表出:\(\beta_1^T\cdot\alpha_1=\beta_2^T\cdot\alpha_2\),其中\(\beta\)是不同坐标系的标准正交基(行分块),\(\alp
阅读全文
一、概述 旋转变换的核心思想 在不同坐标系下,虽然坐标不同,但是同一个向量还是一样的。这句话有点儿怪怪的,但是可以用数学公式表出:\(\beta_1^T\cdot\alpha_1=\beta_2^T\cdot\alpha_2\),其中\(\beta\)是不同坐标系的标准正交基(行分块),\(\alp
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号