会员
周边
新闻
博问
闪存
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
RSheng16
博客园
首页
新随笔
联系
订阅
管理
上一页
1
2
2020年3月24日
Rigid Body Tree Robot Model
摘要: [TOC] Rigid Body Tree Robot Model 刚体树模型是机器人结构的一种表示,你可以用它来表示机器人,如机械手或其他运动学树。 Use objects to create these models. A rigid body tree is made up of rigid
阅读全文
posted @ 2020-03-24 19:47 RSheng16
阅读(967)
评论(0)
推荐(0)
2020年3月18日
一、 滤波基本概念
摘要: [TOC] 1.1 滤波 滤波 一词起源于通信理论,广泛地来说,是指利用一定的手段抑制无用信号,增强有用的数字信号处理过程。 无用信号 ,也叫 噪声 ,是指对系统没有贡献或者起干扰作用的信号。 在通信中,无用信号表现为特定波段频率、杂波;在传感器数据测量中,无用信号表现为幅度干扰。 其实噪声是一个随
阅读全文
posted @ 2020-03-18 21:29 RSheng16
阅读(3508)
评论(0)
推荐(1)
2020年3月17日
三极管与光电耦合器的应用仿真
摘要: 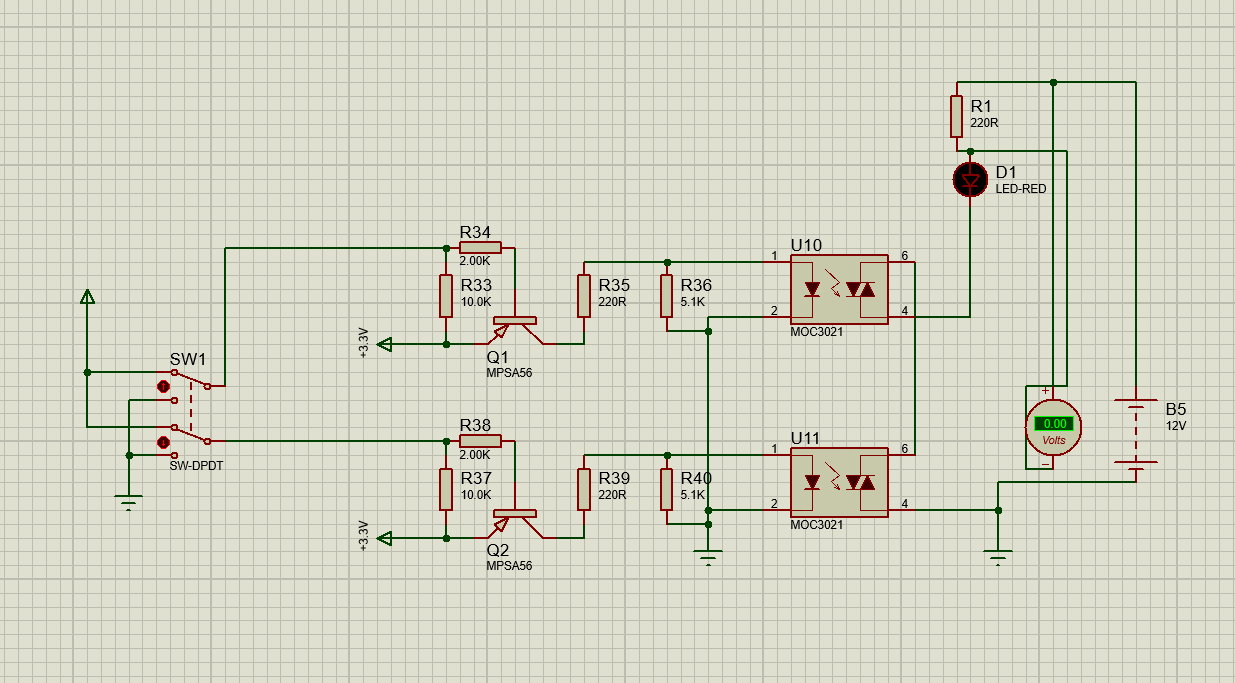 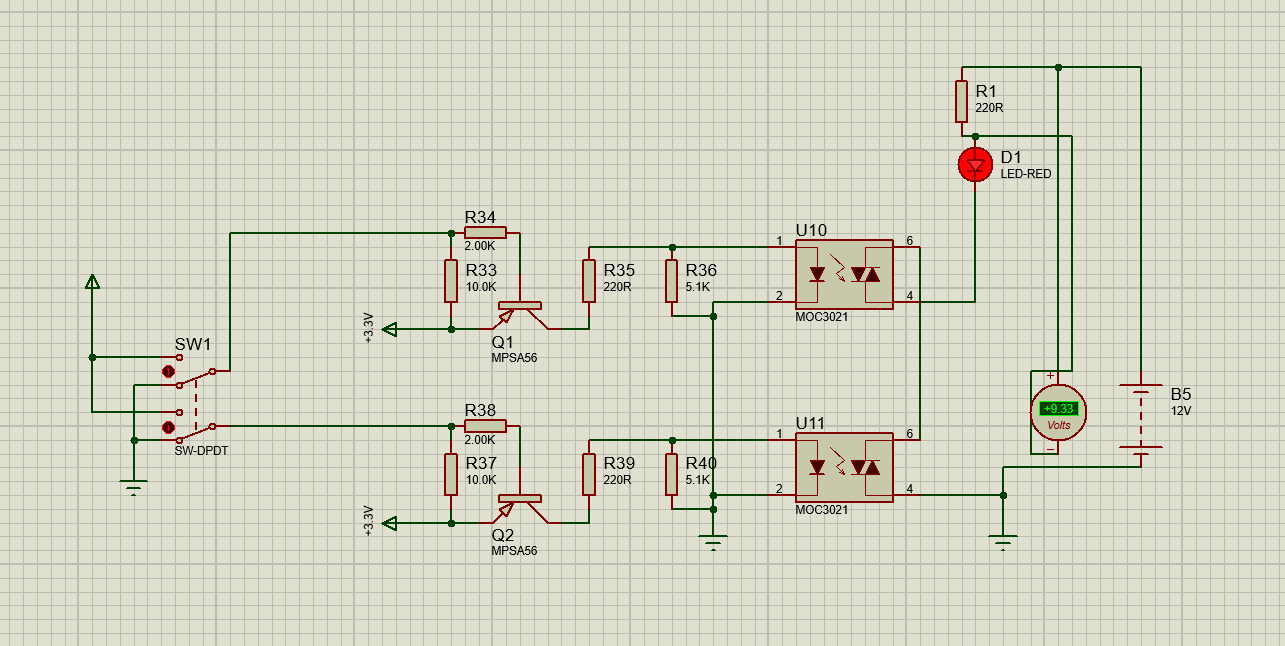
阅读全文
posted @ 2020-03-17 17:53 RSheng16
阅读(326)
评论(0)
推荐(0)
2020年3月16日
stm32f10x/f40时钟配置
摘要: 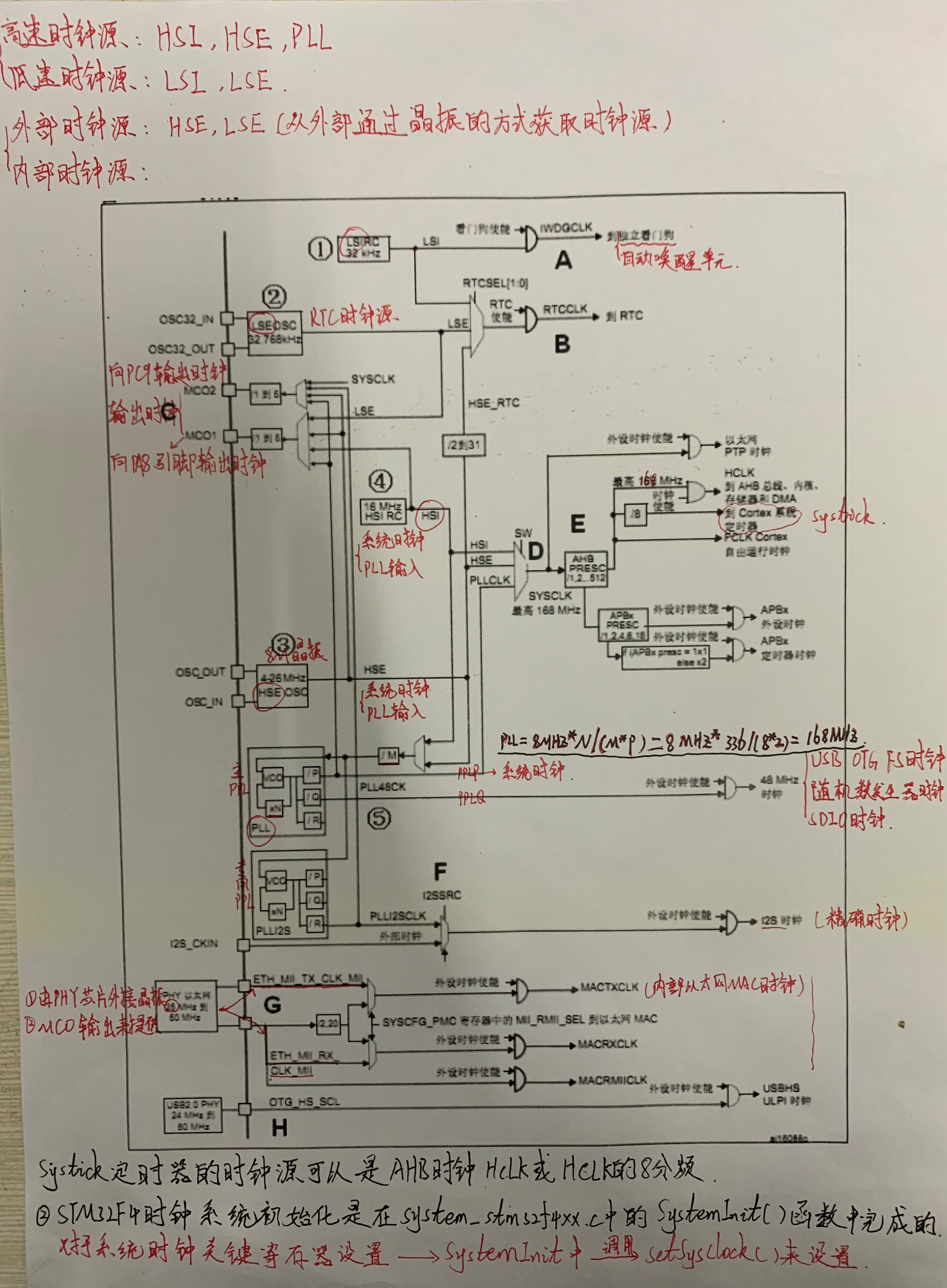 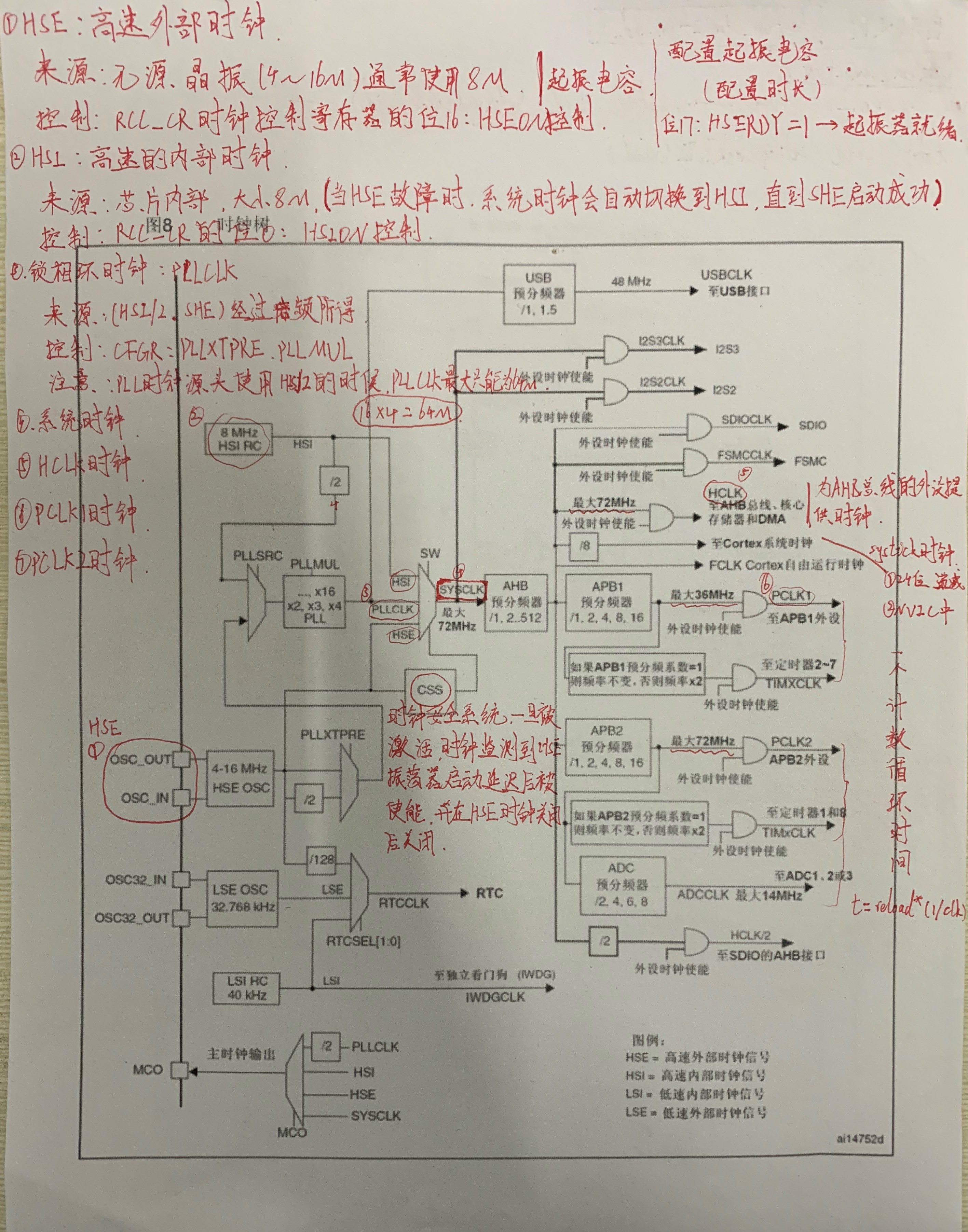 
评论(0)
推荐(0)
2020年3月14日
GPIO寄存器地址与结构体结合
摘要: [TOC] GPIOx寄存器结构体 从图中可以看出,GPIOx的7个寄存器都是32位的,每个寄存器占用4个字节,一共占用28个字节,地址偏移范围为000H~01BH。这7个寄存器的地址偏移量是相对GPIOx的基地址而言的,每个寄存器的地址偏移量不变。 GPIOx的基地址是怎么算出来的呢? (1)获得
阅读全文
posted @ 2020-03-14 13:23 RSheng16
阅读(4550)
评论(0)
推荐(0)
2020年3月13日
GPIO_Pin_x和控制码之位操作思想
摘要: ```C/******** I/O口工作模式 ********/typedef enum{ GPIO_Mode_AIN = 0x0, GPIO_Mode_IN_FLOATING = 0x04, GPIO_Mode_IPD = 0x28, GPIO_Mode_IPU = 0x48, GPIO_Mode_Out_OD = 0x14, GPIO_Mode_Out_PP = 0x10, GPI...
阅读全文
posted @ 2020-03-13 20:23 RSheng16
阅读(592)
评论(0)
推荐(0)
Keil 与Proteus软件的链接文件vdmagdi.exe配置
摘要: 下载 vdmagi.exe 新版本的 proteus 可以通过这个软件傻瓜式配置, 安装后即可使用 。官网下载地址:http://downloads.labcenter.co.uk/vdmagi.exe 注意: 安装时保存路径为Keil的安装路径 上面这个软件安装完成后,会在 Keil 的安装目录的
阅读全文
posted @ 2020-03-13 15:09 RSheng16
阅读(4934)
评论(0)
推荐(0)
Proteus软件的仿真调试方法
摘要: [TOC] 共有3种调试方法,分别是: 1. 直接用扩展名为HEX的十六进制文件调试; 2. 源代码级调试; 3. Keil与Proteus联合调试。 第一种方法 比较简捷,不论是用汇编语言,还是用C语言,都要在Keil下,连接编译成扩展名为HEX的十六进制文件。之后把该HEX文件载入单片机,就可直
阅读全文
posted @ 2020-03-13 14:48 RSheng16
阅读(16681)
评论(0)
推荐(1)
keil5同时编译51和STM32的安装方法及步骤
摘要: https://blog.csdn.net/weixin_42108484/article/details/94733796?depth_1 utm_source=distribute.pc_relevant.none task&utm_source=distribute.pc_relevant.n
阅读全文
posted @ 2020-03-13 11:13 RSheng16
阅读(816)
评论(0)
推荐(0)
2020年3月6日
Stm32 PW1与PW2的区别以及脉冲频率计算
摘要: 这两天在做PID控制PWM调节电机速度,涉及到一些自己不太清楚的知识点,感谢每位博客者的分享,在这我记录下我的收获。 1. 计算脉冲频率: https://blog.csdn.net/qq_26093511/article/details/73909933 2. PWM1与PWM2的区别:1. ht
阅读全文
posted @ 2020-03-06 21:53 RSheng16
阅读(778)
评论(0)
推荐(0)
上一页
1
2
公告
 浙公网安备 33010602011771号
浙公网安备 33010602011771号