斜率优化
斜率优化
[HNOI2008] 玩具装箱
状态转移方程:
设A为 \(sum_i+i\),B为 \(sum_j+j+L+1\)
简化可得:
稍微分解一下,有:
设 \(f_j+B^2\) 为点 \(y\),\(2A\) 为 \(k\),\(B\) 为 \(x\),\(f_i-A^2\) 为 \(b\)。
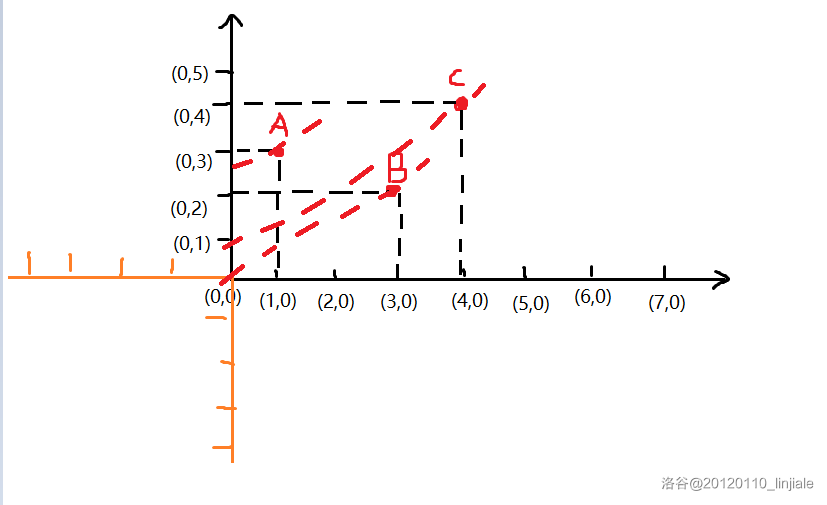
考虑一个确定的点 \((B,f_j+B^2)\),\(k=2A\) 的最小截距。
对于每个确定的 \(i\),可令斜率为 \(h_i\) 的直线过每个决策点,都可求得一个截距。根据状态转移方程可知,其中截距最小的直线方程所经过的决策点即为左右决策。
斜率:
先看一张图:
- 斜率(↑↑↑)
斜率就是坡度,是高度的平均变化率,用坡度来刻划道路的倾斜程度,也就是用坡面的切直高度和水平长度的比,相当于在水平方向移动一千米,在切直方向上升或下降的数值,这个比值实际上就表示了坡度的大小。
即:设 \((0,0)\) 点为 \(a\),\((3,0)\) 点为 \(b\),则点 \(B\) 的斜率为 \(\frac{|b-a|}{B-b}\)。
以下称 \(x_j\) 为 \(x\) 轴的 \(j\) 点,\(y_i\) 为在 \(y\) 轴的 \(i\) 点。
在绝v额集合中筛选出部分决策,使得在 \(x_j\) 递增的顺序下,相邻的决策点所炼成的线段的斜率单调递增。对于任意连续的三个所选决策 \(j_{i-1},j_{i},j_{i+1}\),都有:
在对应坐标系中,相邻点之间连成的线段呈现出“下凸”形态,即为“凸包”。
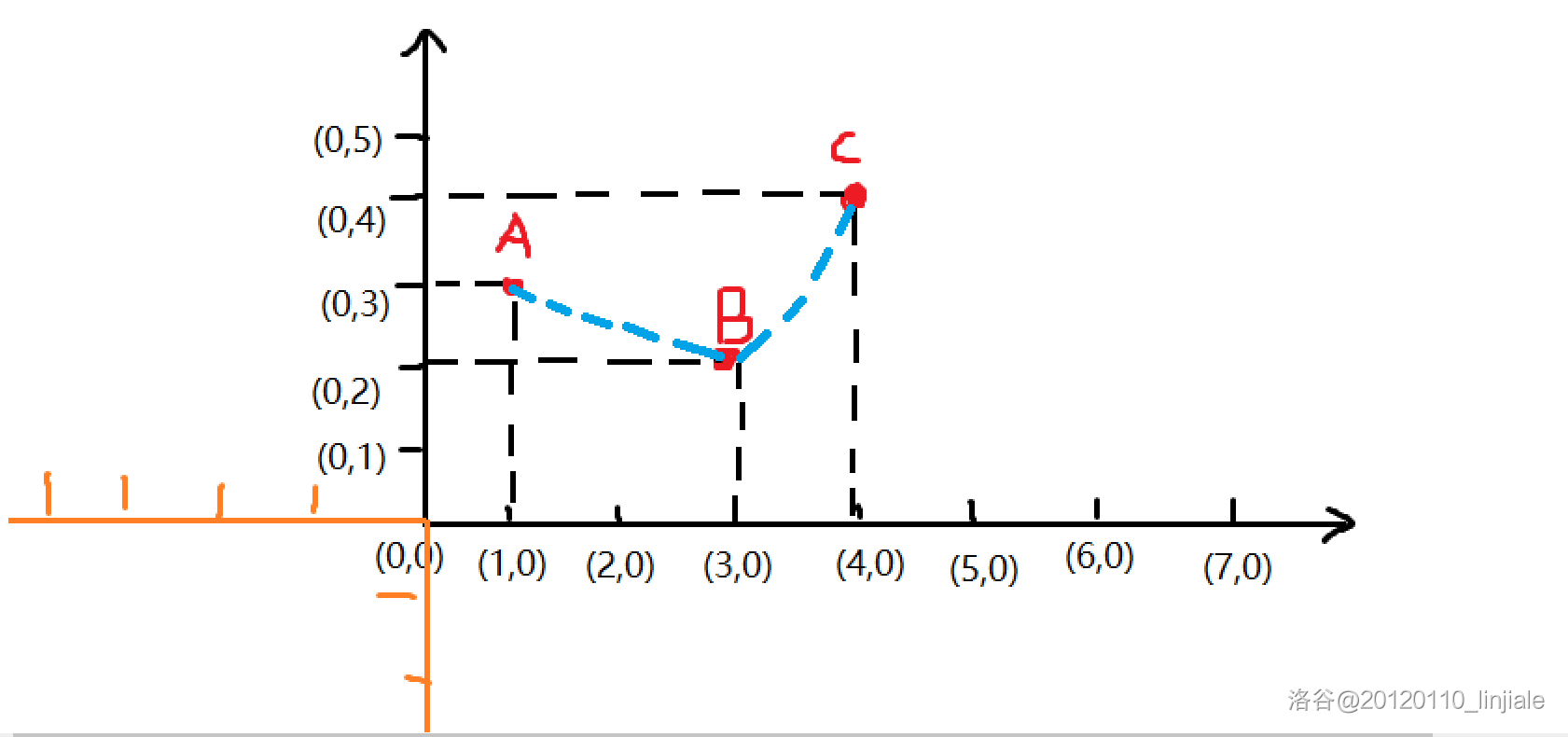
- 凸包(↑↑↑)
若斜率函数 \(h_i\) 与 \(x_j\) 均为单调递增函数,随着 \(j\) 的递增,决策点的横坐标也单调递增,新决策必定会出现在整个凸包的最右端。又因为斜率函数具有单调性,所以每次需要求解的直线斜率 \(h_i\) 也单调递增。决策集合仅保留下凸曲线上相邻现代斜率大于 \(h_i\) 的剩余决策点,所以曲线最右端的决策点即为最优决策。
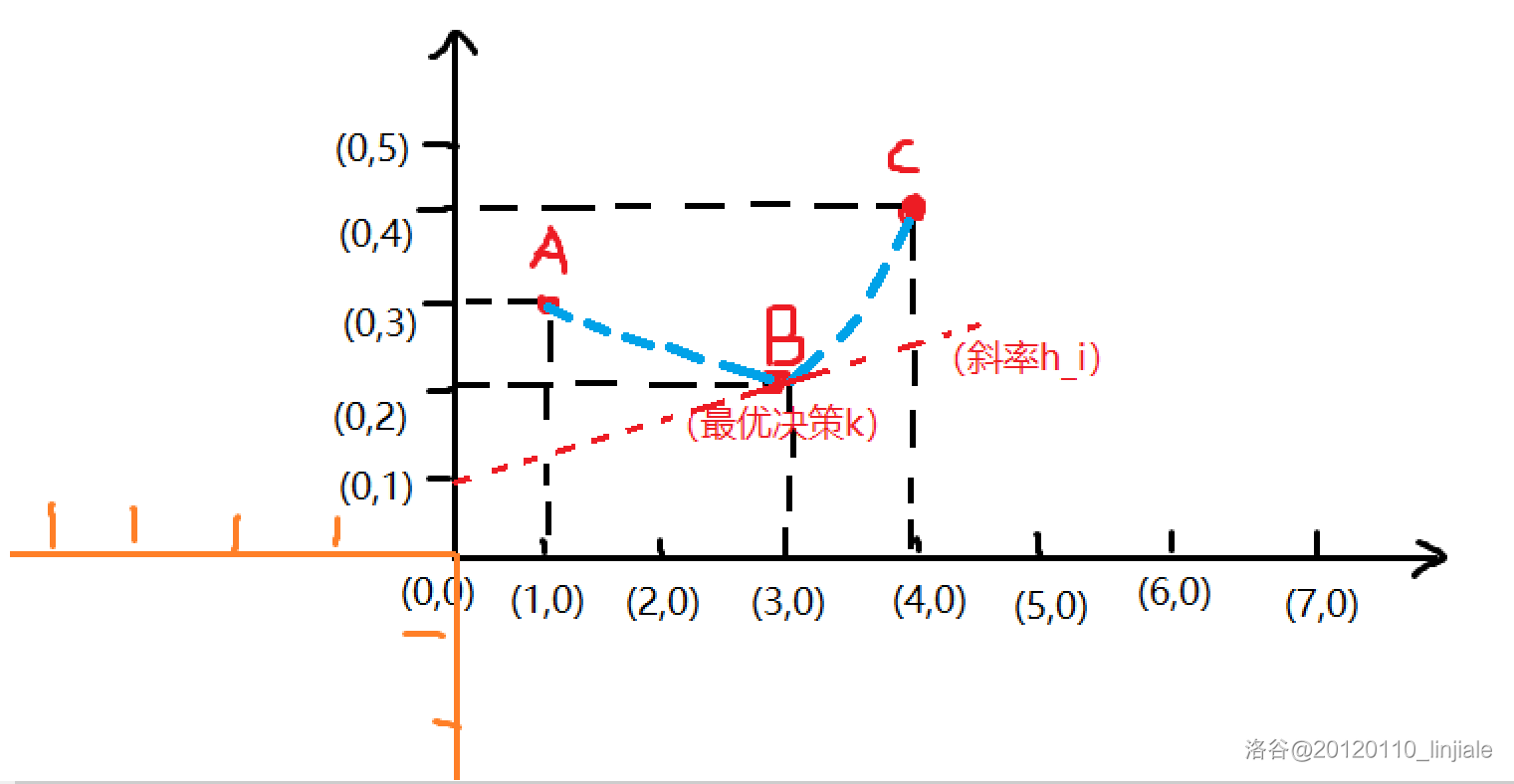
- 最优决策、最优斜率、截距(设B点为最佳决策点)
根据如上性质,我们不难想出,用双端队列 q[l~r] 维护下凸曲线,队列中保存部分决策,对应下凸曲线上的决策点,满足 \(x_i\) 和 \(h_i\) 都递增。
具体实施方案:
- 为了保证队头即为最优决策,仅需保留下凸曲线上斜率大于 \(h_i\) 的点,从队头开始检查决策 \(q_l\) 和后续决策 \(q_{l+1}\) 对应点连接线的斜率。若该斜率小等于 \(h_i\),则把 \(q_l\) 出队,继续检查寻得队头和后续决策,直至线段斜率大于 \(h_i\)。
- 直接取队头决策 \(j=q_l\) 为最优决策,进行状态转移。
- 将当前状态 \(i\) 为新的决策从队尾插入。在插入前需要维护凸曲线性质,即三个决策点 \(q_{r-1},q_r,i\) 对应的相邻线段需要满足斜率单调递增,否则吧决策 \(q_r\) 出队,继续检查 \(q_{r-2},q_{r-1},i\),直至满足要求。设此操作一共进行了 \(n\) 轮,则最终需要判断的三个状态为 \(q_{r-n},q_{r-n+1},i\)。
时间复杂度:\(O(N)\)。
- 若斜率函数 \(h_i\) 不满足单调性,则 \(x_j\) 为单调递增函数,队头不为最优决策,须保留整个下凸曲线,可在队列中二分查找,求出一个位置 \(k\),使得:
若满足以上条件,则 \(k\) 为最优决策。
时间复杂度:\(O(n \log n)\)。
AC Code:
#include<bits/stdc++.h>
using namespace std;
typedef long long ll;
ll n,l;
const ll MAXN=5e4+5;
ll q[MAXN],sum[MAXN],f[MAXN];
ll head=1,tail=1;
ll j;
inline ll x(ll j)//x坐标
{
return sum[j];
}
inline ll y(ll j)//y坐标
{
return f[j]+(sum[j]+l)*(sum[j]+l);
}
inline double slope(ll i,ll j)//计算
{
return (double)(y(j)-y(i))/(x(j)-x(i));
}
inline ll compute(ll i,ll j)//代价公式
{
return (sum[i]-sum[j]-l)*(sum[i]-sum[j]-l);
}
int main(){
scanf("%lld%lld",&n,&l);
l++;//因为一直都是-l-1,干脆直接变为 -(l+1)
for(ll i=1;i<=n;i++)
{
scanf("%lld",&sum[i]);
sum[i]+=sum[i-1]+1;//前缀和
}
q[tail]=0;
for(ll i=1;i<=n;i++)//dp
{
while(head<tail&&slope(q[head],q[head+1])<=(sum[i]<<1))//出队首条件
head++;
j=q[head];//队首
f[i]=f[j]+compute(i,j);//计算
while(head<tail&&slope(q[tail-1],q[tail])>=slope(q[tail-1],i))//出队末条件
tail--;
q[++tail]=i;//最优决策入队
}
printf("%lld\n",f[n]);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号