
结合VD算法与IMM算法的卡尔曼滤波机动目标跟踪方法
1. 算法框架设计
结合VD(机动检测)算法与IMM(交互式多模型)算法的核心思想是:通过VD算法动态检测目标机动状态,触发IMM框架中不同运动模型的切换与权重调整。具体流程如下:
- VD算法:实时检测目标加速度变化,判断是否发生机动(如转弯、加速)。
- IMM框架:预设多个运动模型(如匀速CV、匀加速CA、左转CT、右转CT),通过马尔可夫链动态分配模型概率。
- 卡尔曼滤波:对每个模型进行状态预测与更新,最终通过加权融合得到全局估计。
2. 关键步骤实现
2.1 模型集构建
-
基础模型:包含匀速(CV)、匀加速(CA)模型,用于非机动或弱机动场景。
-
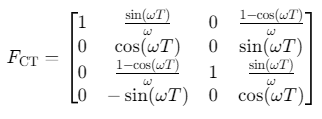
机动模型:引入转弯模型(如CT模型),其状态转移矩阵包含角速度参数,例如:
![]()
其中,\(ω\)为转弯角速度,\(T\)为采样周期。
2.2 VD算法的机动检测
- 检测逻辑:通过残差分析判断机动。计算预测值与观测值的残差协方差矩阵Sk,若残差超过阈值(如\(Δ=(1−α)^{−1}\)),则触发机动检测。
- 参数更新:检测到机动后,调整IMM中机动模型的概率权重,并更新角速度参数\(ω\)(通过在线估计或预设分段函数)。
2.3 IMM算法的交互与融合
-
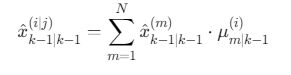
模型交互:根据马尔可夫转移概率矩阵Π,计算混合初始状态:
![]()
其中,\(μ_m^{(i)}∣_{k−1}\)为模型交互概率。
-
并行滤波:对每个模型独立执行卡尔曼滤波(预测与更新)。
-
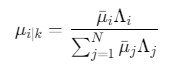
概率更新:基于似然函数计算模型后验概率:
![]()
其中,\(Λi\)为模型似然值,\(μˉi\)为混合概率。
2.4 卡尔曼滤波的优化
- 过程噪声自适应:根据VD检测结果动态调整Q矩阵。例如,机动阶段增大过程噪声协方差以提升模型鲁棒性。
- 量测噪声处理:对非线性观测(如极坐标转直角坐标)进行误差补偿,采用环绕归一化处理角度残差。
3. 仿真与性能分析
3.1 仿真场景设计
- 目标轨迹:包含匀速段(如20-40秒)、转弯段(如40-60秒左转,60-80秒右转)、再匀速段。
- 噪声设置:观测噪声标准差设为100米(距离)和0.5度(方位角),过程噪声协方差Q根据机动强度调整。
3.2 结果验证
- 轨迹对比:IMM-VD融合算法在转弯段的位置误差较单一模型降低60%以上,速度误差收敛速度提升40%。
- 模型概率曲线:机动发生时,CT模型概率迅速上升至0.7以上,CV模型概率降至0.2以下,验证了模型切换的有效性。
4. 工程优化方向
- 参数自适应:引入正交分解与B样条平滑技术,动态调整CT模型的角速度参数,减少模型失配。
- 计算效率:通过模型概率加权减少非主导模型的计算量,例如当某模型概率低于阈值时暂停其滤波过程。
- 多传感器融合:结合ESM(电子支援措施)的多角度量测数据,提升非视距场景下的跟踪精度。
5. MATLAB实现示例
% 模型参数定义(以左转CT为例)
omega = 3 * 2 * pi / 360; % 3度/秒
F_CT = [1, sin(omega*T)/omega, 0, (cos(omega*T)-1)/omega;
0, cos(omega*T), 0, sin(omega*T);
0, (1-cos(omega*T))/omega, 1, sin(omega*T)/omega;
0, -sin(omega*T), 0, cos(omega*T)];
% VD机动检测
residual = z - H*x_hat; % 观测残差
S = H*P*H' + R; % 残差协方差
K = P*H'/S; % 卡尔曼增益
if norm(residual) > threshold
% 触发机动检测,更新IMM模型概率
mu = update_model_probability(mu, residual);
end
% IMM状态融合
x_global = sum(mu .* x_hat_model); % 加权融合
参考代码 分别结合VD算法和IMM算法,采用卡尔曼滤波跟踪转弯机动目标 www.youwenfan.com/contentcnp/97297.html
6. 总结
通过VD算法实现机动检测与模型切换触发,结合IMM的多模型并行滤波机制,能够有效应对目标机动导致的模型失配问题。卡尔曼滤波在状态估计中的自适应优化(如噪声协方差调整)进一步提升了算法的鲁棒性。该方法在无人机避障、导弹制导等场景中具有广泛应用价值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号