

摘要: 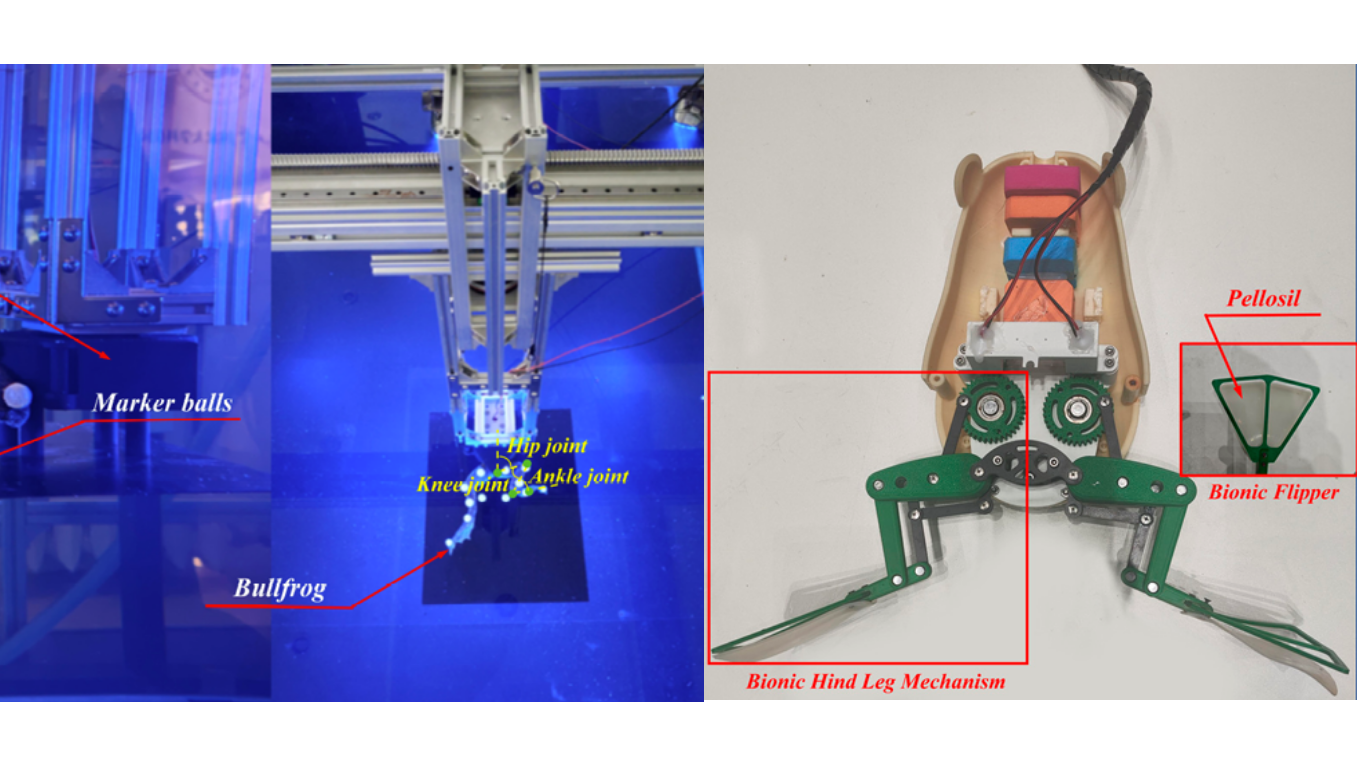 东北大学储逸尘在 Biomimetics 及 JMSE 发表两项仿生水下机器人研究,以牛蛙后肢及牛鼻鲼胸鳍为灵感基于多连杆机构设计两种仿生水下推进机制,并通过水下动捕实验验证其运动学与推进性能。研究团队采用 NOKOV 度量动作捕捉系统用于获取真实生物及仿生机构在水下环境中的运动学数据,为仿生模型分析与实验验证提供数据支持。 阅读全文
东北大学储逸尘在 Biomimetics 及 JMSE 发表两项仿生水下机器人研究,以牛蛙后肢及牛鼻鲼胸鳍为灵感基于多连杆机构设计两种仿生水下推进机制,并通过水下动捕实验验证其运动学与推进性能。研究团队采用 NOKOV 度量动作捕捉系统用于获取真实生物及仿生机构在水下环境中的运动学数据,为仿生模型分析与实验验证提供数据支持。 阅读全文
东北大学储逸尘在 Biomimetics 及 JMSE 发表两项仿生水下机器人研究,以牛蛙后肢及牛鼻鲼胸鳍为灵感基于多连杆机构设计两种仿生水下推进机制,并通过水下动捕实验验证其运动学与推进性能。研究团队采用 NOKOV 度量动作捕捉系统用于获取真实生物及仿生机构在水下环境中的运动学数据,为仿生模型分析与实验验证提供数据支持。 阅读全文
posted @ 2025-12-29 09:30
您家豆子
阅读(1)
评论(0)
推荐(0)
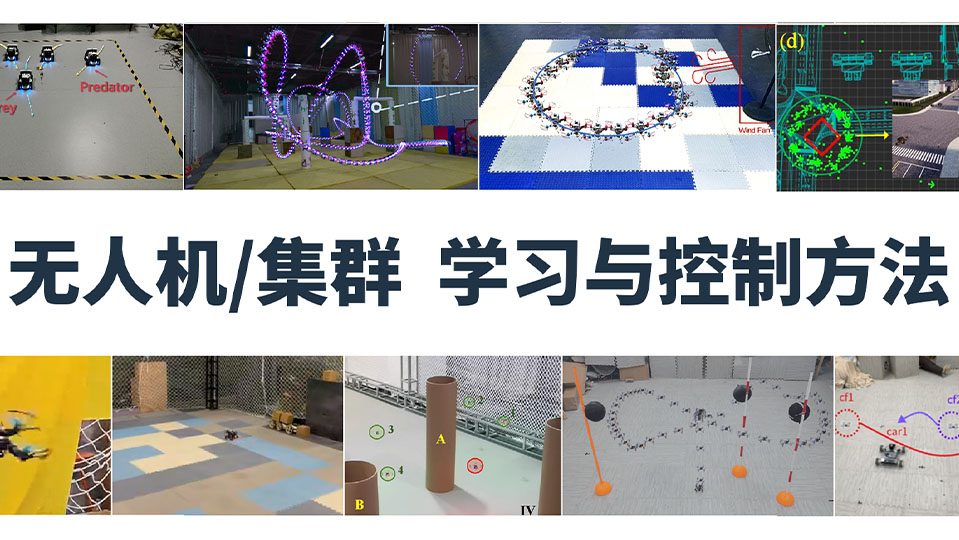 高精度光学动作捕捉如何为无人机提供飞行姿态与轨迹真值?在IROS 2025多项无人机学习与控制的相关研究中,NOKOV度量动捕系统通过提供无人机的亚毫米级位姿真值,支撑从动态模型验证、强化学习闭环控制到多机协同策略评估等一系列无人机研究真实实验,成为算法从仿真走向可靠部署的“度量标尺”。
高精度光学动作捕捉如何为无人机提供飞行姿态与轨迹真值?在IROS 2025多项无人机学习与控制的相关研究中,NOKOV度量动捕系统通过提供无人机的亚毫米级位姿真值,支撑从动态模型验证、强化学习闭环控制到多机协同策略评估等一系列无人机研究真实实验,成为算法从仿真走向可靠部署的“度量标尺”。  南京航空航天大学自动化学院使用NOKOV度量动作捕捉系统获取多架无人机的精确位置信息,实现多架无人机协同实时路径规划。
南京航空航天大学自动化学院使用NOKOV度量动作捕捉系统获取多架无人机的精确位置信息,实现多架无人机协同实时路径规划。  利用动捕技术对无人机着陆系统模型进行动力学分析,对折纸结构双稳态着陆系统性能进行测试,为无人机着陆系统结构设计提供创新方法。
利用动捕技术对无人机着陆系统模型进行动力学分析,对折纸结构双稳态着陆系统性能进行测试,为无人机着陆系统结构设计提供创新方法。  摘要:一种新的校准方法,使用动作捕捉作为测量工具,利用ELM神经网络作为非几何误差源补偿,提升工业机器人的绝对精度。 同济大学航力学院的研究人员提出了一种新的标定方法,利用运动捕捉系统和人工神经网络(ELM)来增加工业机器人的绝对精度。所提出的方法与传统校准方法相比,在姿态精度方面可以实现较大改进。
摘要:一种新的校准方法,使用动作捕捉作为测量工具,利用ELM神经网络作为非几何误差源补偿,提升工业机器人的绝对精度。 同济大学航力学院的研究人员提出了一种新的标定方法,利用运动捕捉系统和人工神经网络(ELM)来增加工业机器人的绝对精度。所提出的方法与传统校准方法相比,在姿态精度方面可以实现较大改进。  浙公网安备 33010602011771号
浙公网安备 33010602011771号