中科院自动化所:基于关系图深度强化学习的机器人多目标包围问题新算法
摘要:中科院自动化所蒲志强教授团队,提出一种基于关系图的深度强化学习方法,应用于多目标避碰包围问题(MECA),使用NOKOV度量动作捕捉系统获取多机器人位置信息,验证了方法的有效性和适应性。研究成果在2022年ICRA大会发表。
在多机器人系统的研究领域中,包围控制是一个重要的课题。其在民用和军事领域都有广泛的应用场景,包括协同护航、捕获敌方目标、侦察监视、无人水面舰艇巡逻狩猎等。
这些应用的核心问题是如何控制一个多机器人系统,涉及多目标分配,同时解决目标包围和避碰子问题。这是一个巨大的挑战,特别是对于分散的多机器人系统。
中科院自动化所蒲志强教授团队在2022年ICRA大会发表论文,提出了一种基于关系图的深度强化学习方法,对各种条件下的多目标避碰包围(MECA)问题具有良好的适应性。
定义任务
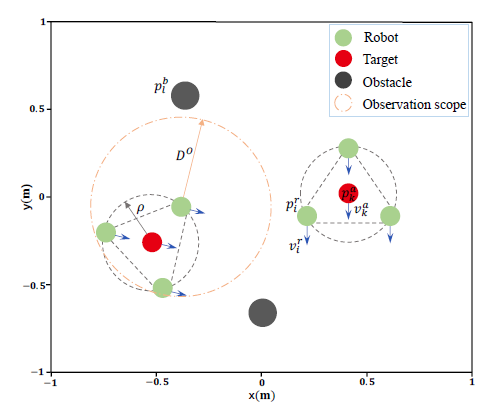
该研究定义了一个MECA任务,即在具有L个静态障碍物(黑色圆圈)的环境中,由N个机器人(绿色圆圈)组成的多机器人系统,协同包围K (1 < K < N)个静止或运动的目标(红色圆圈)。
所有机器人需要自动形成多组,包围所有目标,每组需要形成圆形队形,包围一个独立的目标,同时避免碰撞。这涉及到以下三个子问题:
1) 动态多目标分配与分组
2) 每组分别包围
3) 相互之间避免碰撞
分散式多机器人系统的MECA图解
方法框架
在MECA问题中,存在三种类型的实体,即机器人、目标和障碍物。不同的实体对机器人有不同的影响关系,例如避障、包围目标、与其他机器人合作等。
研究提出了一种基于机器人级和目标级关系图(RGs)的DRL分散方法,命名为MECA-DRL-RG方法。
具体而言:
- 利用图注意网络(GATs)对机器人级RGs进行建模和学习,该RGs由每个机器人与其他机器人、目标和障碍物之间的三个异构关系图组成。
- 利用GAT构建目标级RG,构建机器人与各目标之间的空间关系。目标的运动由目标级RG建模,并通过监督学习进行学习,以预测目标的轨迹。
- 此外,定义了一个知识嵌入式复合奖励函数,解决MECA中的多目标问题。采用基于集中式训练和去中心化执行框架的演员-评论家训练算法对策略网络进行训练。

MECA-DRL-RG方法的整体结构
实验验证
研究团队分别进行了仿真实验和真实环境实验。在真实实验中,情景设置为:6个机器人在有2个障碍物的环境中包围2个移动的目标。机器人的位置和速度数据由NOKOV度量动作捕捉系统提供。
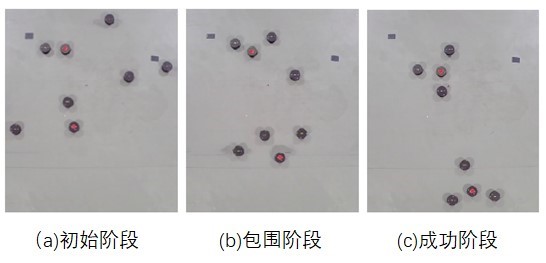
6个机器人在有2个障碍物的环境中包围2个移动目标
仿真实验和真实实验都验证了,相比于其他方法,MECA-DRL-RG方法使机器人能够从周围环境中,学习异构空间关系图,并预测目标的轨迹,从而促进每个机器人对其周围环境的理解和预测。证实了MECA-DRL-RG方法的有效性。
并且,无论机器人、障碍物或目标的数量增加,抑或是目标的移动速度加快,MECA-DRL-RG方法都表现出良好的性能,具有广泛的适应性。
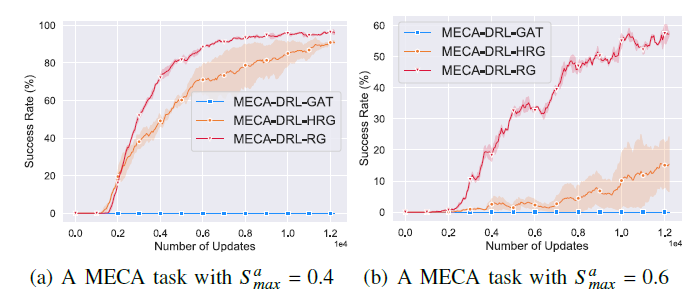
MECA-DRL-RG方法训练曲线
参考文献:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号