
欧拉角和万向节锁
一个物体在空间中的姿态有很多种表达方式。欧拉证明三个正交的坐标轴可以用来表示任意姿态。
定义,
,
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll,即偏航角,俯仰角和横滚角。
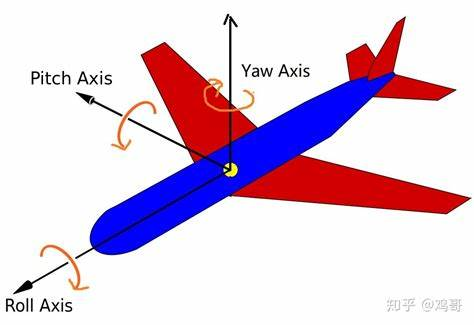
欧拉角表示姿态变换,按照X-Y-Z三个轴依次旋转对应角度。在旋转过程中,会出现万向节锁现象,即丢失一个自由度。
这里有个网站可以直观演示:https://3d.sumo.app/?lang=zh
首先确定三个坐标轴
万向节锁即Y轴旋转90度,此时Z轴和X轴重合,控制效果一致,丢失一个自由度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号