

【转】visualSFM生成的bundle.rd.out文件的格式
1、bundle.out
文件包含了一些经过估算得到的场景和相机几何信息。文件的格式如下:
//----------------------------------------------------开始------------------------------------------
# Bundle file v0.3
<num_cameras> <num_points> //[相机个数] [点个数] [2个整数]
<camera1> [相机1]
<camera2> [相机2]
...
<cameraN> [相机N]
<point1> [点1]
<point2> [点2]
...
<pointM> [点M]
//每一个相机实体<camera> 的值是估算得到的相机内部和外部参数,形式为:
//每个相机的排序根据其在图片列表中的出现顺序来指定。
//每个相机参数占据5行
<f> <k1> <k2> [焦距,后面跟着两个径向畸变多项式系数]
<R> [一个3X3矩阵:代表相机旋转]
<t> [一个3维向量:描述摄像机平移]
//每个点实体<pointI>格式为:
//每个点占据3行
<position> [3向量描述该点的三维位置]
<color> [ 3向量描述该点的RGB颜色]
<view list>
接着就是对应的图像索引信息、该SIFT关键点在该幅图像的索引信息、该关键点在该幅图像的二维像素坐标(相对于图像中心)//对应四个参数
再第二、第三...图像的(与第一相同)
//---------------------------------------------------------------------------------------------------------------------结束
根据这些bundle.out文件内容以及小孔成像模型,我们就可以大致得到每台相机的参数:
焦距 (f),
两个径向畸变参数(K1和K2),
旋转矩阵 (R),
平移矩阵 (t)。
按照下面的法则我们可以将一个3D点X 投影到参数为(R,t,f)的相机中:
P = R * X + t (从世界到相机坐标转换)
p = -P / P.z ( 透视除法)
p' = f * r(p) * p (转换到像素坐标)
其中,P.z是P的z坐标值。r(p)是一个用来计算出径向畸变校正的尺度变量值的函数:
r(p) = 1.0 + k1 * ||p||^2 + k2 * ||p||^4.
最后,利用上面的公式还可以得到相机的方向为:
R' * [0 0 -1]' (其中,' 表示一个矩阵或者向量的转置)
而相机的空间位置就为:
-R' * t .
//-----------------------------------------------------------------------------------------------------------------
2、0000xxx.txt
//---------------------开始----------------------
CONTOUR
P[0][0] P[0][1] P[0][2] P[0][3]
P[1][0] P[1][1] P[1][2] P[1][3]
P[2][0] P[2][1] P[2][2] P[2][3]
//---------------------结束----------------------
"CONTOUR" (轮廓)只是一个标题。P[3][4]表示一个3x4投影矩阵,其定义如下:
假设(x y z 1)表示一个点的齐次三维坐标,(u v 1)表示其图像投影的齐次二维坐标,
然后( x y z 1 )和( u v1 )与以下等式相关:
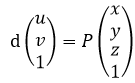
其中d是关于照相机的点的深度。
(注意,图像坐标系统的原点位于图像的左上角(严格地说,原点位于图像左上角的像素的中心)。
x轴指向右边,y轴指向底部。
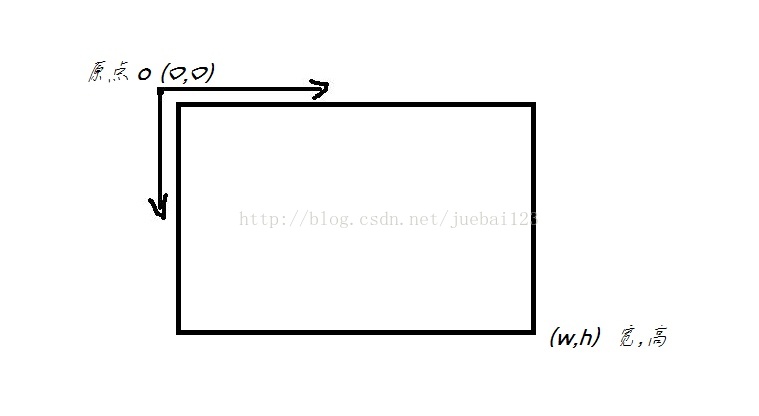
因此,左上角像素的2d图像坐标是( 0,0 ),并且右下角像素的2d图像坐标是( w,h),
其中w和h分别是图像的宽度和高度。)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号