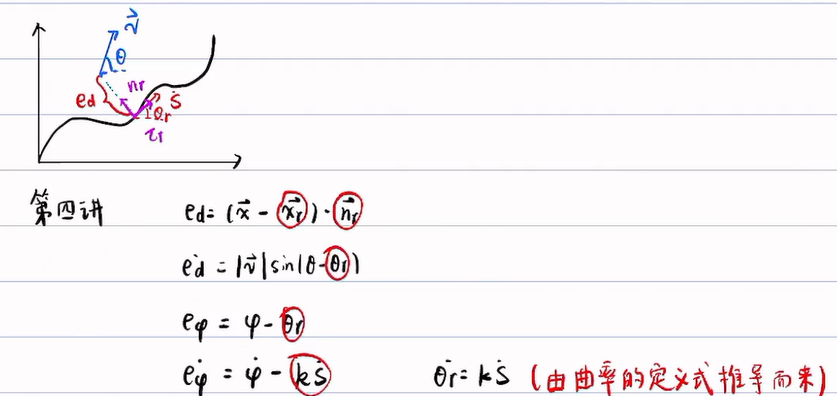
自动驾驶控制算法第七讲 离散规划轨迹的误差计算


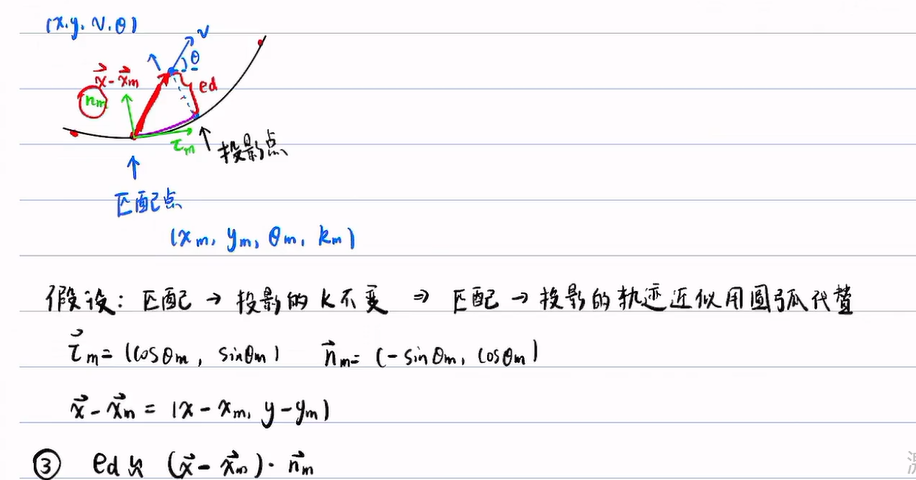
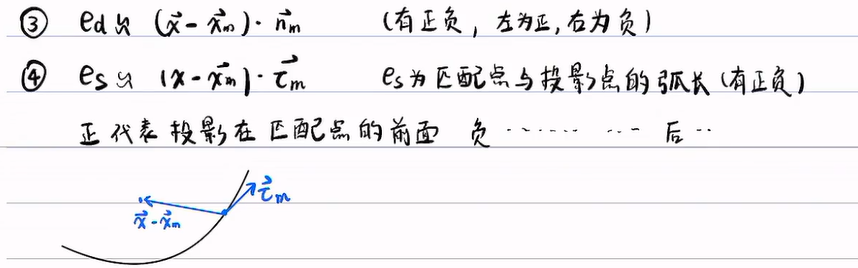
ed约等于这块使用的高中求投影公式(x向量 - xr向量)点乘 nm向量 除以nm的模长,就是x向量 - xr向量在nm方向上的投影,nm向量为单位向量所以nm的模长为1

第四节得到汽车状态方程
第五节了解了LQR的控制原理
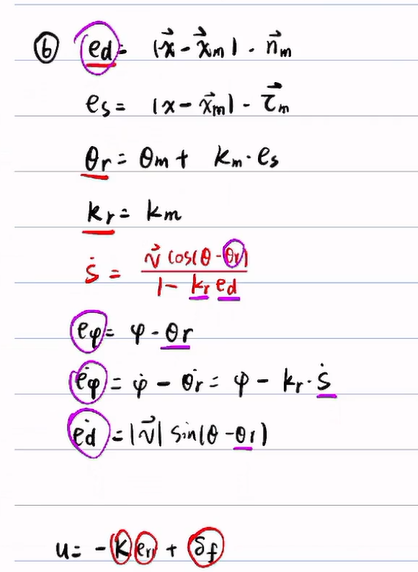
本节推导状态变量的如何表达,从而根据公式k*x = u,计算得到输出u(即δ,前轮转角)
我们向往远方,却忽略了此刻的美丽
ed约等于这块使用的高中求投影公式(x向量 - xr向量)点乘 nm向量 除以nm的模长,就是x向量 - xr向量在nm方向上的投影,nm向量为单位向量所以nm的模长为1
第四节得到汽车状态方程
第五节了解了LQR的控制原理
本节推导状态变量的如何表达,从而根据公式k*x = u,计算得到输出u(即δ,前轮转角)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号