

论文解读-《Non-local Neural Networks》
1. 论文介绍
论文题目:Non-local Neural Networks. CVPR 2018.
论文领域:图像识别

2.相关工作
在传统的计算机视觉的non-local means方法的基础下,提出了non-local operation 可以捕获远距离的特征依赖。不同于卷积操作的只能逐层传递局部邻居特征,非局部算子可以通过计算所有位置的加权特征和,直接建立全局连接。
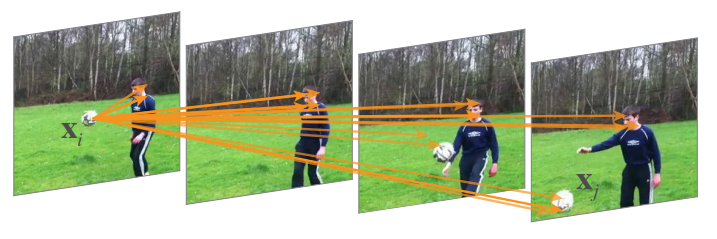
和传统的卷积操作最大的区别是卷积是依赖于邻居周围的特征,而非局部和整个图尝试去建立连接来产生特征。
这个图展示了第一帧的足球的点与后面三帧的有关联的点。点与点之间的关系可以是时间的联系,也可以是空间,也可以是时空的。
3. 论文核心
非局部算子Non-local operation可以定义为:

其中输入x和输出y是相同的尺寸,位置i的输出信号是由位置i的输入信号和所有i和j可能存在的关系的j的信号的乘积,其中f表示i和j的信号连接关系,g是对j信号的一种特征提取。所有的j表示所有的位置都被考虑到了。
上面的公式与全连接层的区别:nl计算不同位置之间的关系的响应,fc使用的是学习权重。(位置i和位置j的关系不是输入数据的函数)
为了简化,把g看做是一个线性嵌入 g(x) = W*x 其中W是一个可学习的权重
关系函数f可以有多个版本
1,高斯函数 Gaussian ,其中使用了点积相似度,同样欧几里得距离也是可行的,但是点积更加实现友好型。
2,嵌套高斯Embedded Gaussian,是高斯函数的拓展版本,分别针对两个点的x进行嵌入,得到另外一个的嵌入空间中的特征
3,点积相似度

5,串联拼接,其中 [**] 内是串联操作,把位置i和j的特征的嵌入空间特征进行串联操作。

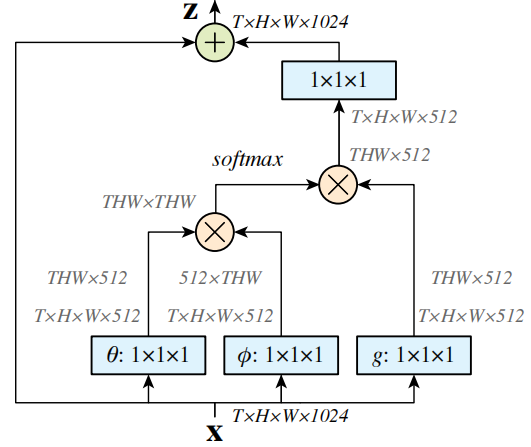
非局部块 Non-local block,在非局部算子的基础上,多增加一个residual连接的x,整个计算框架在高级别和子采样下是轻量化的。
4. 典型案例
一个典型的非局部块的例子为下图,非局部算子是嵌入高斯类型。
5. 实验设置
在视频分类问题和目标检测问题都可以发挥优越的性能。
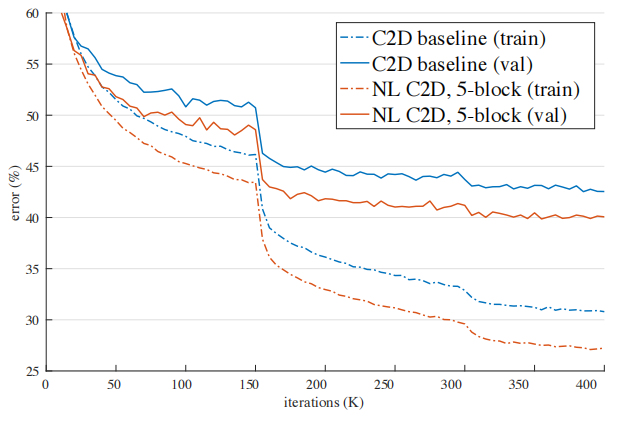
在关于训练曲线上,可以观察到带有非局部块的网络的收敛速度更快。
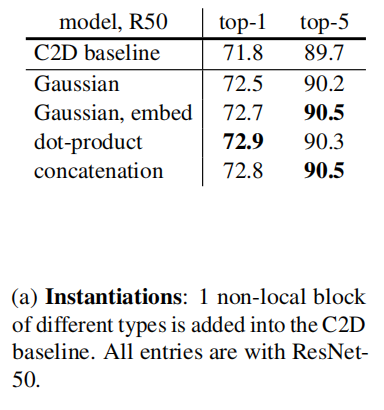
实验证明,不同的非局部算子之间的效果性能差异较小,说明了非局部框架的有效性,而不是特定实现细节。
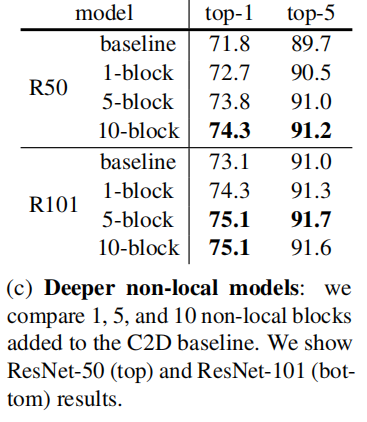
实验在resnet里面加入了不同数量的NLB,证明加入越多NLB,能稳定获得更好的效果。
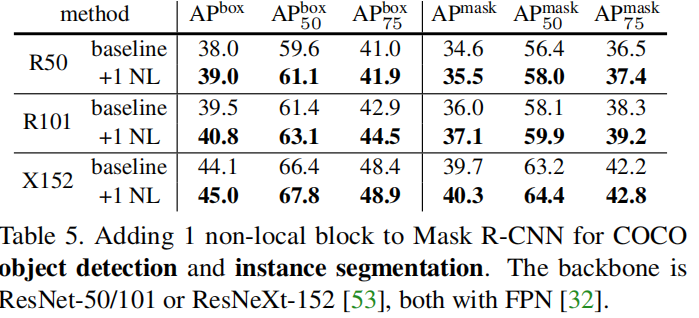
在目标检测上也同样取得了好的效果
6. 代码解释
class _NonLocalBlockND(nn.Module):
def __init__(self, in_channels, inter_channels=None,
dimension=3, sub_sample=True, bn_layer=True):
"""
:param in_channels: 输入通道数
:param inter_channels: 输出的通道数
:param dimension: 输入图像的维度
:param sub_sample: 是否有下采样层
:param bn_layer: 是否有BatchNorm层
"""
super(_NonLocalBlockND, self).__init__()
assert dimension in [1, 2, 3]
self.dimension = dimension
self.sub_sample = sub_sample
self.in_channels = in_channels
self.inter_channels = inter_channels
if self.inter_channels is None:
self.inter_channels = in_channels // 2
if self.inter_channels == 0:
self.inter_channels = 1
if dimension == 3:
conv_nd = nn.Conv3d
max_pool_layer = nn.MaxPool3d(kernel_size=(1, 2, 2))
bn = nn.BatchNorm3d
elif dimension == 2:
conv_nd = nn.Conv2d
max_pool_layer = nn.MaxPool2d(kernel_size=(2, 2))
bn = nn.BatchNorm2d
else:
conv_nd = nn.Conv1d
max_pool_layer = nn.MaxPool1d(kernel_size=(2))
bn = nn.BatchNorm1d
self.g = conv_nd(in_channels=self.in_channels, out_channels=self.inter_channels,
kernel_size=1, stride=1, padding=0)
if bn_layer:
self.W = nn.Sequential(
conv_nd(in_channels=self.inter_channels,
out_channels=self.in_channels,
kernel_size=1, stride=1, padding=0),
bn(self.in_channels)
)
nn.init.constant_(self.W[1].weight, 0)
nn.init.constant_(self.W[1].bias, 0)
else:
self.W = conv_nd(in_channels=self.inter_channels, out_channels=self.in_channels,
kernel_size=1, stride=1, padding=0)
nn.init.constant_(self.W.weight, 0)
nn.init.constant_(self.W.bias, 0)
self.theta = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1, stride=1, padding=0)
self.phi = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1, stride=1, padding=0)
if sub_sample:
self.g = nn.Sequential(self.g, max_pool_layer)
self.phi = nn.Sequential(self.phi, max_pool_layer)
def forward(self, x, return_nl_map=False):
"""
:param x: (b, c, t, h, w)
:param return_nl_map: if True return z, nl_map, else only return z.
:return:
"""
batch_size = x.size(0)
g_x = self.g(x).view(batch_size, self.inter_channels, -1)
g_x = g_x.permute(0, 2, 1)
theta_x = self.theta(x).view(batch_size, self.inter_channels, -1)
theta_x = theta_x.permute(0, 2, 1)
phi_x = self.phi(x).view(batch_size, self.inter_channels, -1)
f = torch.matmul(theta_x, phi_x)
f_div_C = F.softmax(f, dim=-1)
y = torch.matmul(f_div_C, g_x)
y = y.permute(0, 2, 1).contiguous()
y = y.view(batch_size, self.inter_channels, *x.size()[2:])
W_y = self.W(y)
z = W_y + x
if return_nl_map:
return z, f_div_C
return z
7. 总结
CV领域和GNN的经典论文,给出了全局性的特征描述。
实验设计很详细,数据分析很到位,做学术的都应该这样。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号