

games101学习:Lecture 04 Transformation cout
Announcement:首先,先去写homework0,这节课会很难QAQ。
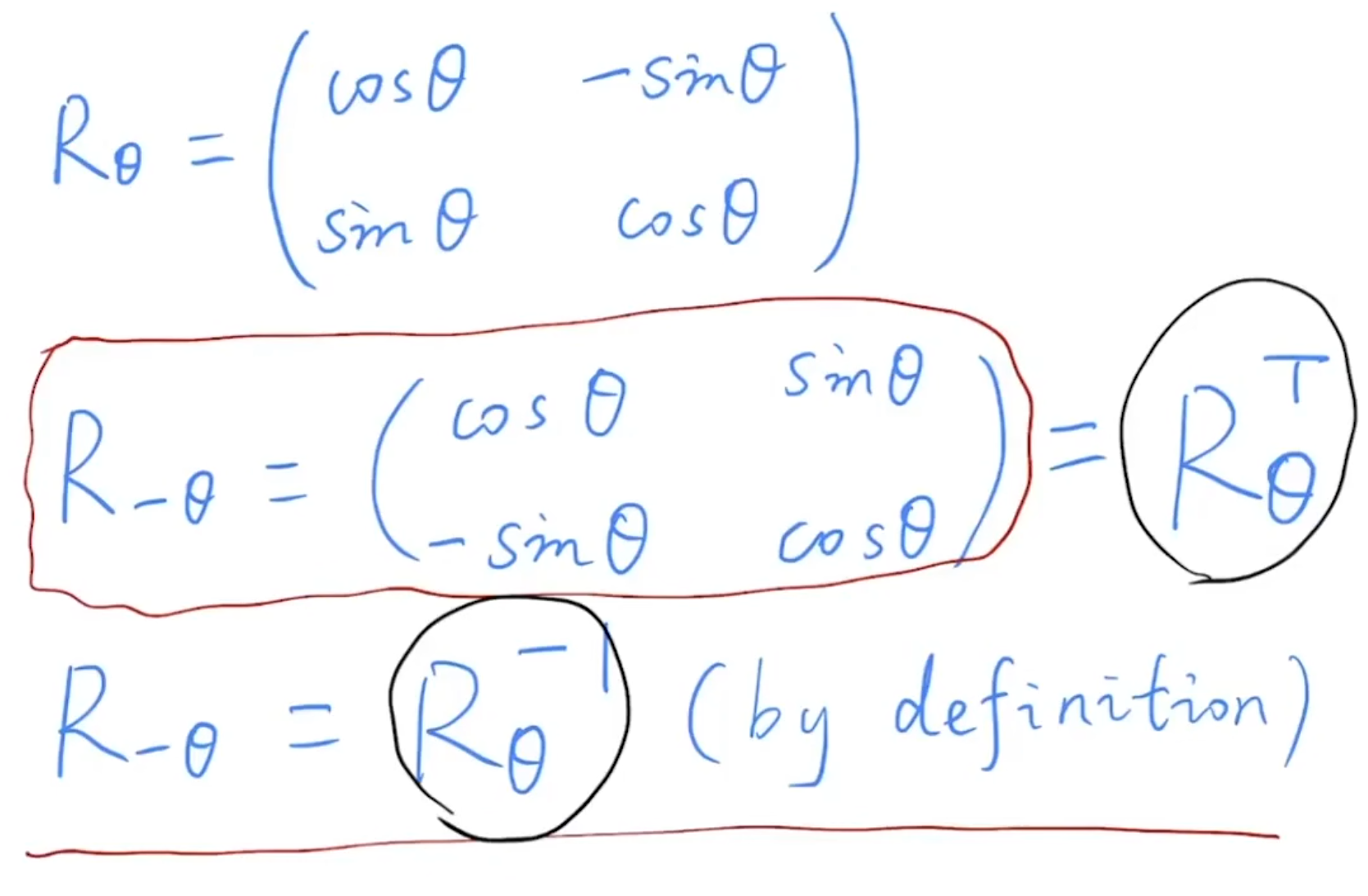
旋转矩阵有这样一个性质,旋转负theta角度和旋转theta角度的逆 其实是一样的。
旋转矩阵的逆 = 旋转矩阵的转置。
今天的内容主要包括视图view和投影变换,一点点的三维变换。

其中投影包括 正交 和 透视。
3D变换,绕着x,y,z轴进行旋转。
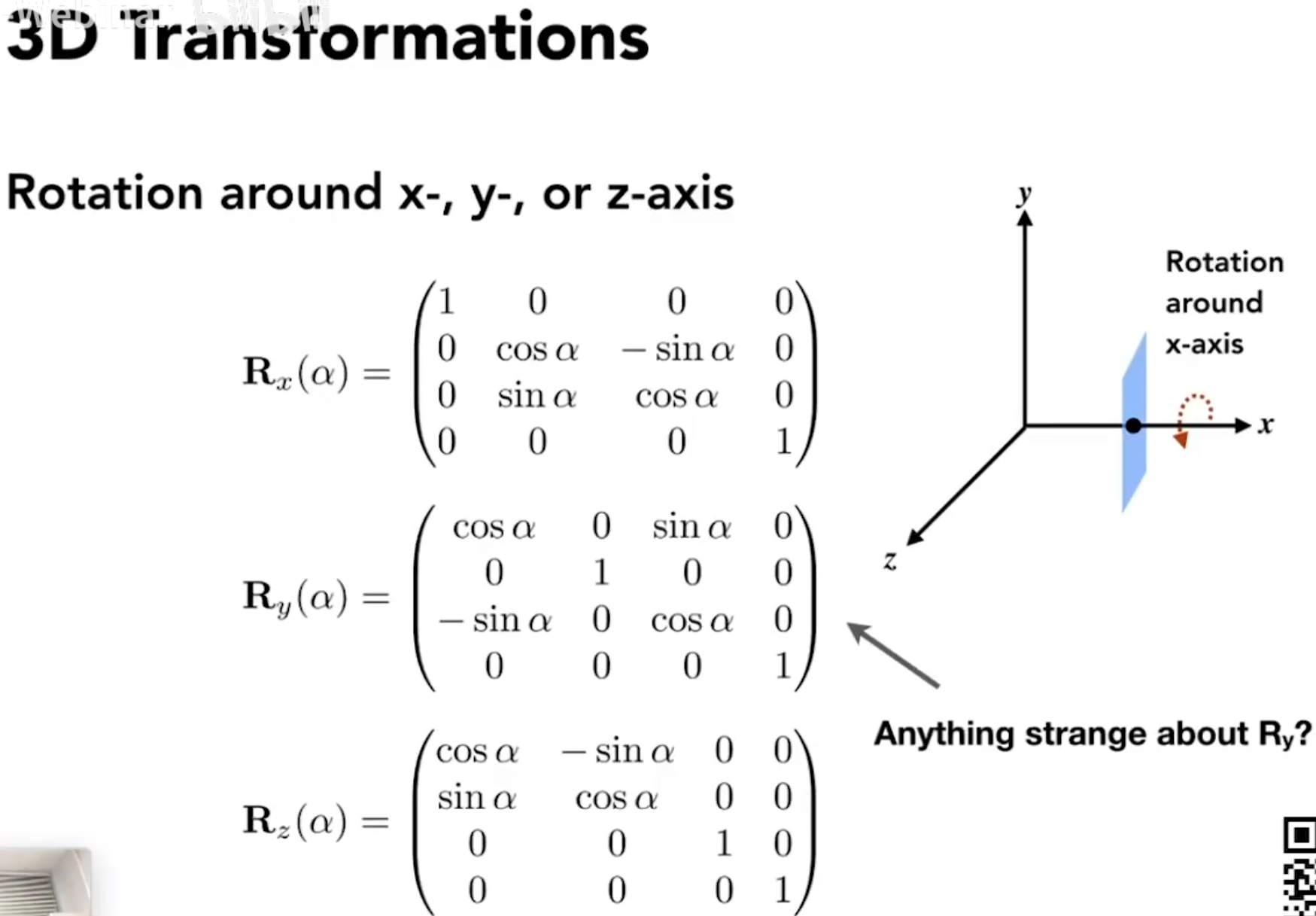
注意Ry的旋转有些许不同,Rx和Rz都和二维的变换非常的像。为什么呢?
和*面直角坐标系有关。
这是关键:绕 y 轴旋转是在 xz *面 上旋转,但注意在右手坐标系中,从 y 轴正方向看向原点,x 轴向右,z 轴向外(朝向观察者)。
此时旋转正方向(右手定则)与二维中的“x 向右,y 向上”情况坐标对应关系不同:
在二维旋转中,正角度是 从 x 轴转向 y 轴。在 xz *面中,如果保持“x 向右,z 向上”的类比,那么正旋转方向是 从 z 轴转向 x 轴(顺时针),而数学上我们希望正角度是 从 x 轴转向 z 轴(逆时针)。这导致了公式中 sinα的符号需要交换位置(实际上是转置关系)来保持一致的物理旋转方向。
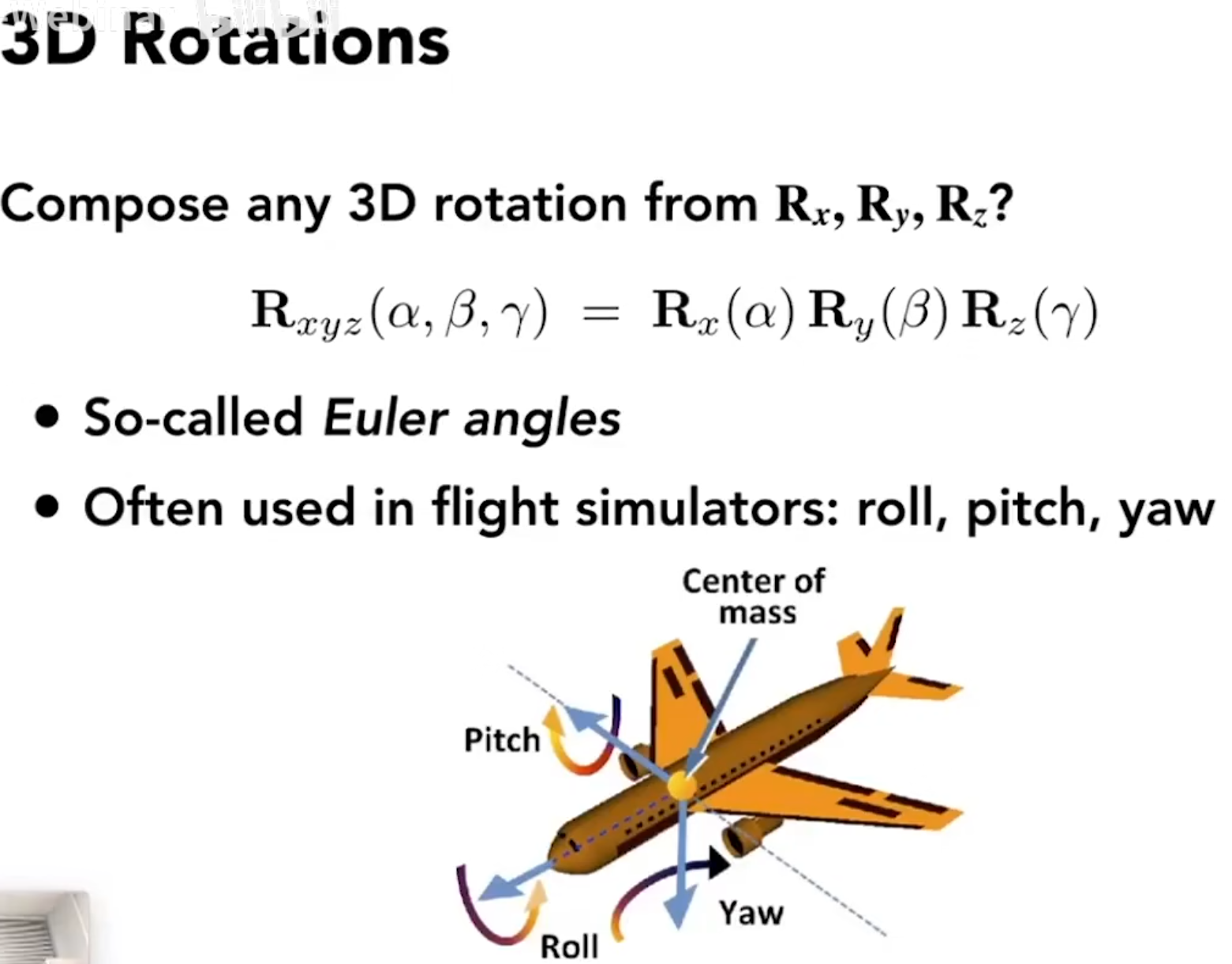
复杂的,绕任意轴的旋转都可以分解为多个绕x,y,z轴的旋转。
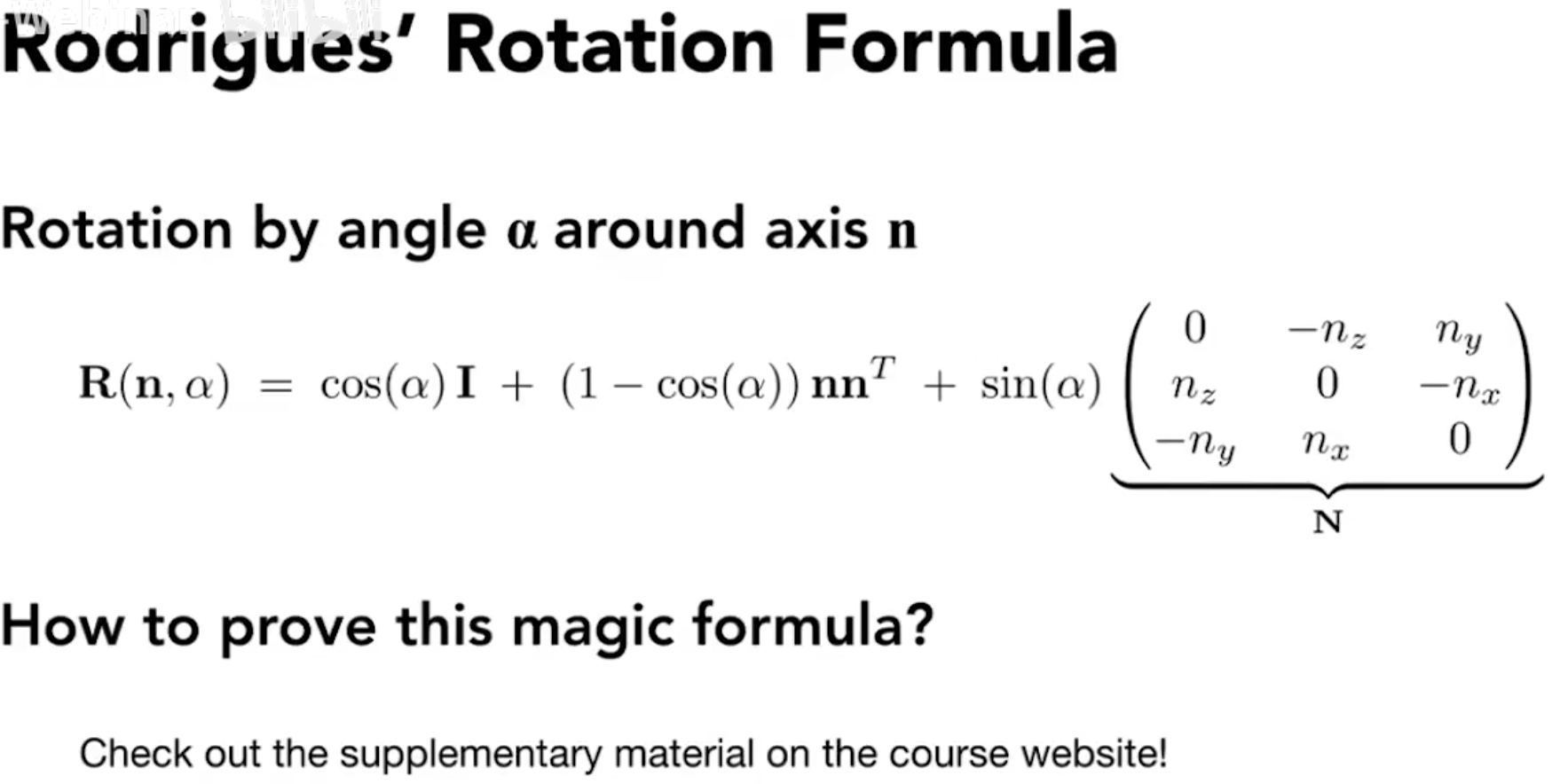
图形学中有人发明了一套办法,叫做Rodrigues' Rotation Formula罗德里格斯旋转公式,可以将任意的旋转写为矩阵。
通过任意的旋转分解为三个绕着x,y,z轴旋转来。
如何推导的呢? https://www.cnblogs.com/wtyuan/p/12324495.html
后续推导:
思想:绕着某一个点n旋转某一个角度a。先将那个点*移到原点,再进行旋转,再进行逆*移回去。
View/Camera Transformation
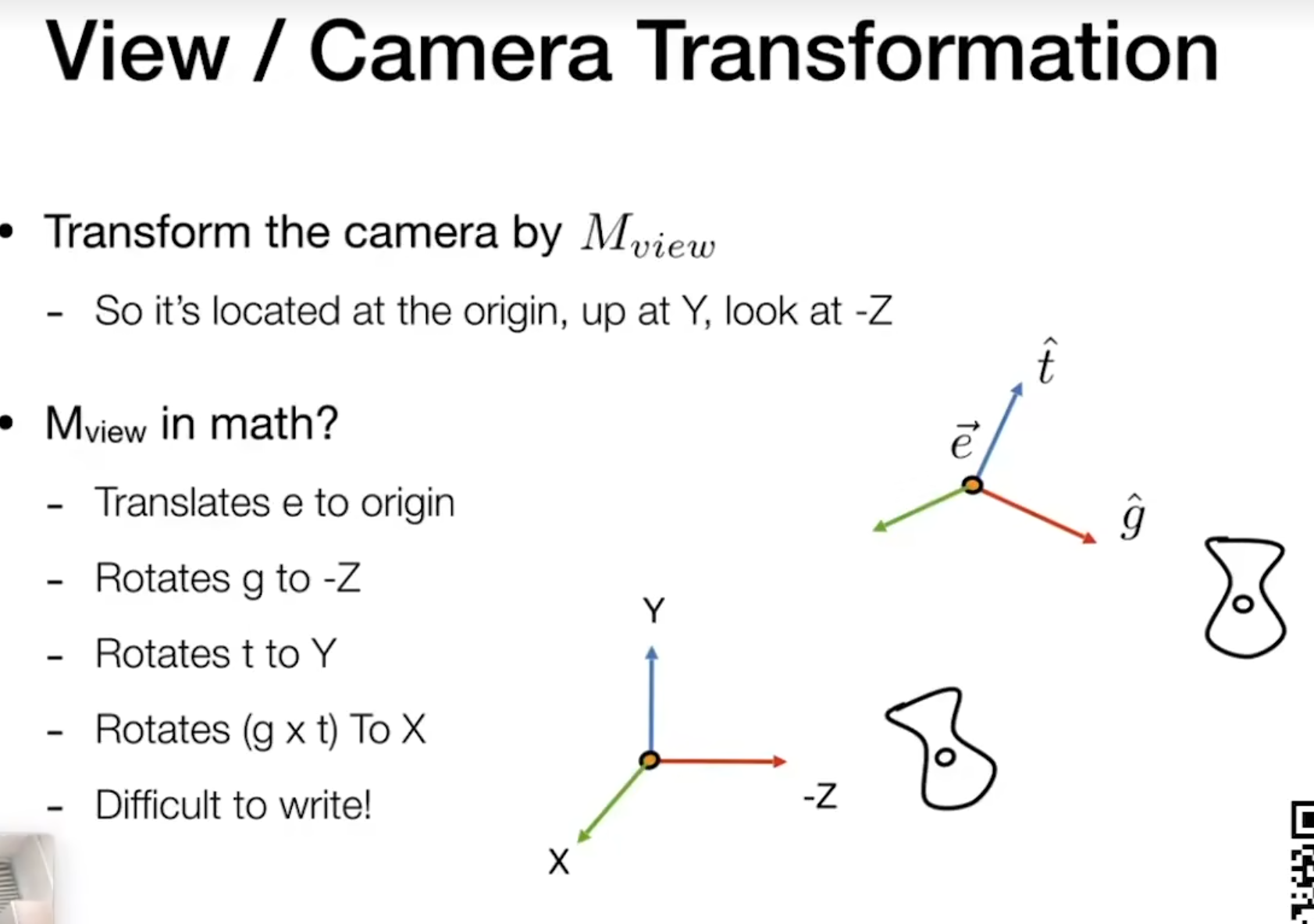
将摄像机从" e t g " 转换为 " x y z",怎么从数学上来表达呢?
先将这个点移动到原点的地方去,*移量是(-x,-y,-z)。*移之后再考虑旋转
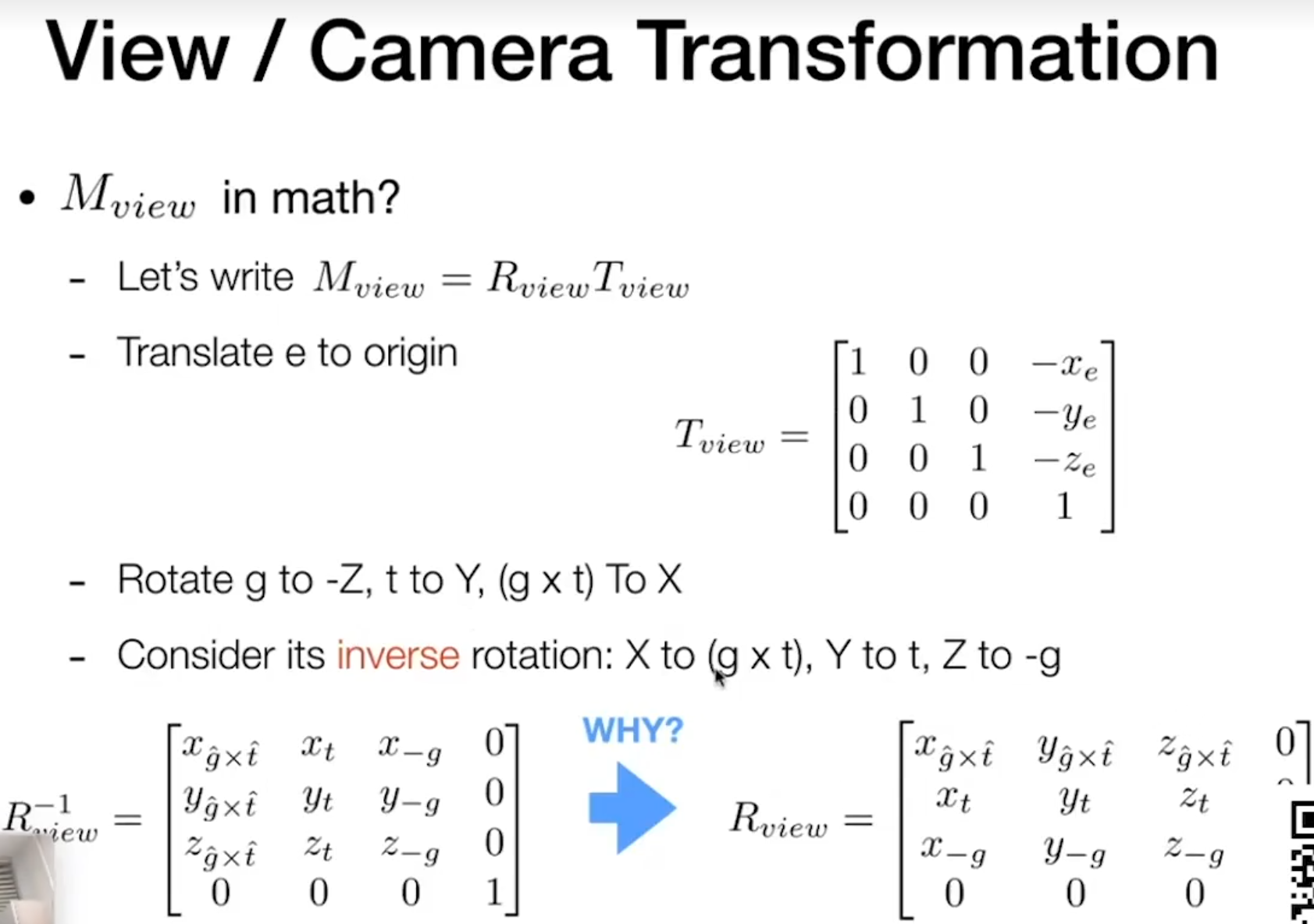
先进行*移再进行旋转,因此有Miew = Rview * Tview
这个旋转矩阵是一个正交矩阵(为什么?),其性质有正交矩阵的逆矩阵同时也是转置矩阵
为什么:

概念:MVP(Model View Projection)
投影变换(Projection transformation)
-Orthographic projection 正交投影 一般用来工程制图
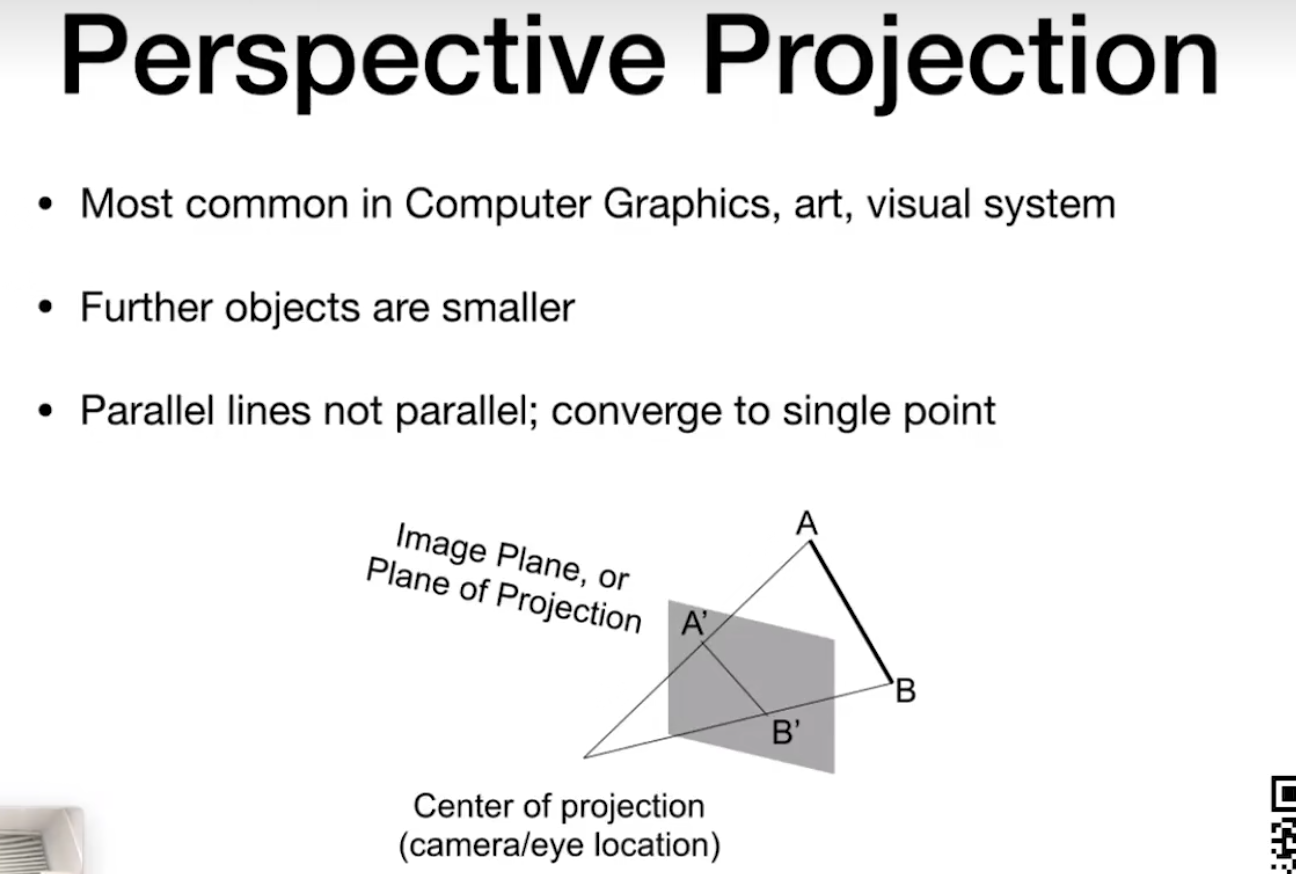
-Perspective projection 透视投影 一般用来画画,给人一种*大远小的感觉
为什么会产生正交投影 和 透视投影的概念,一个是点,一个是*面图。
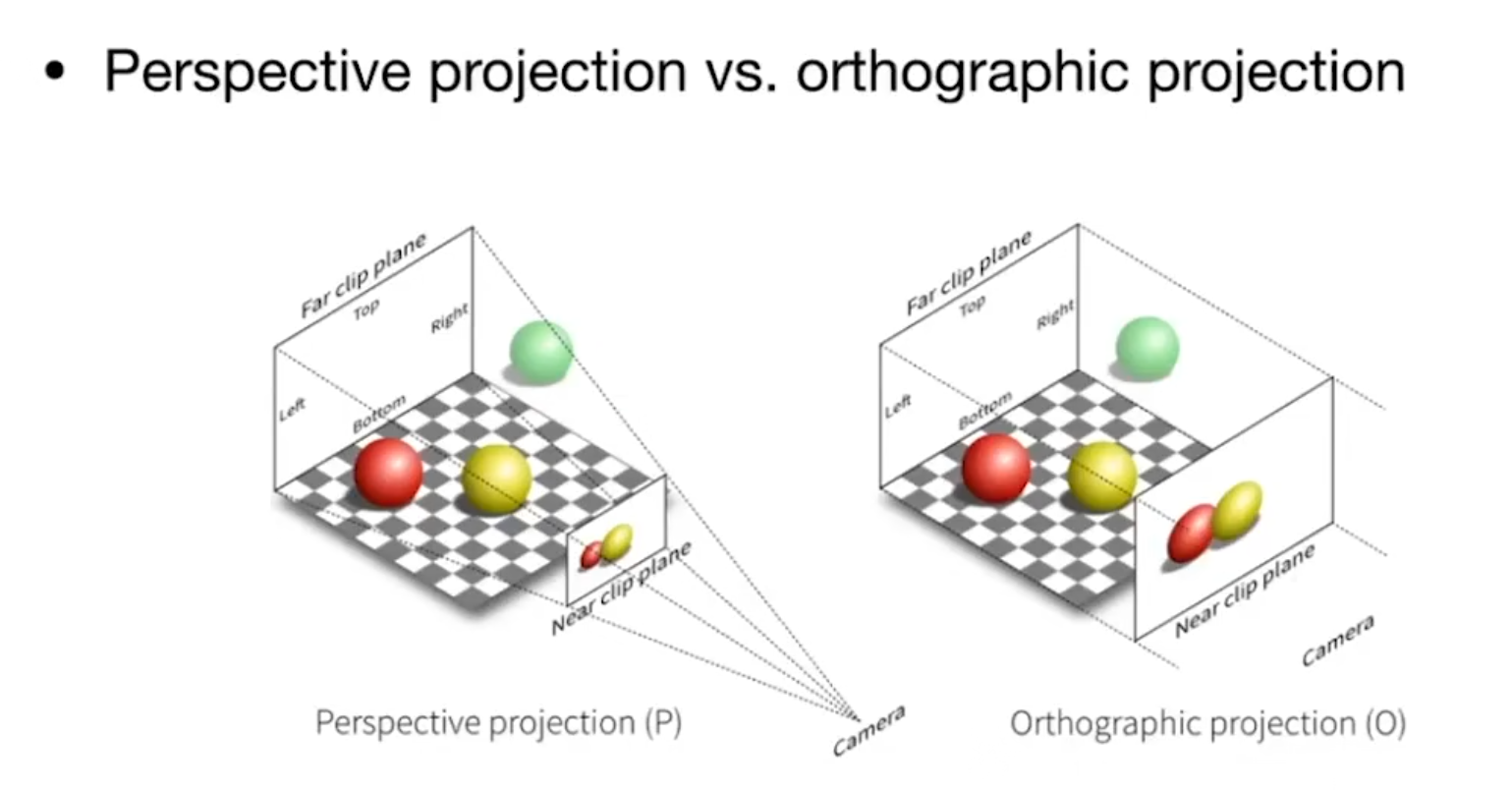
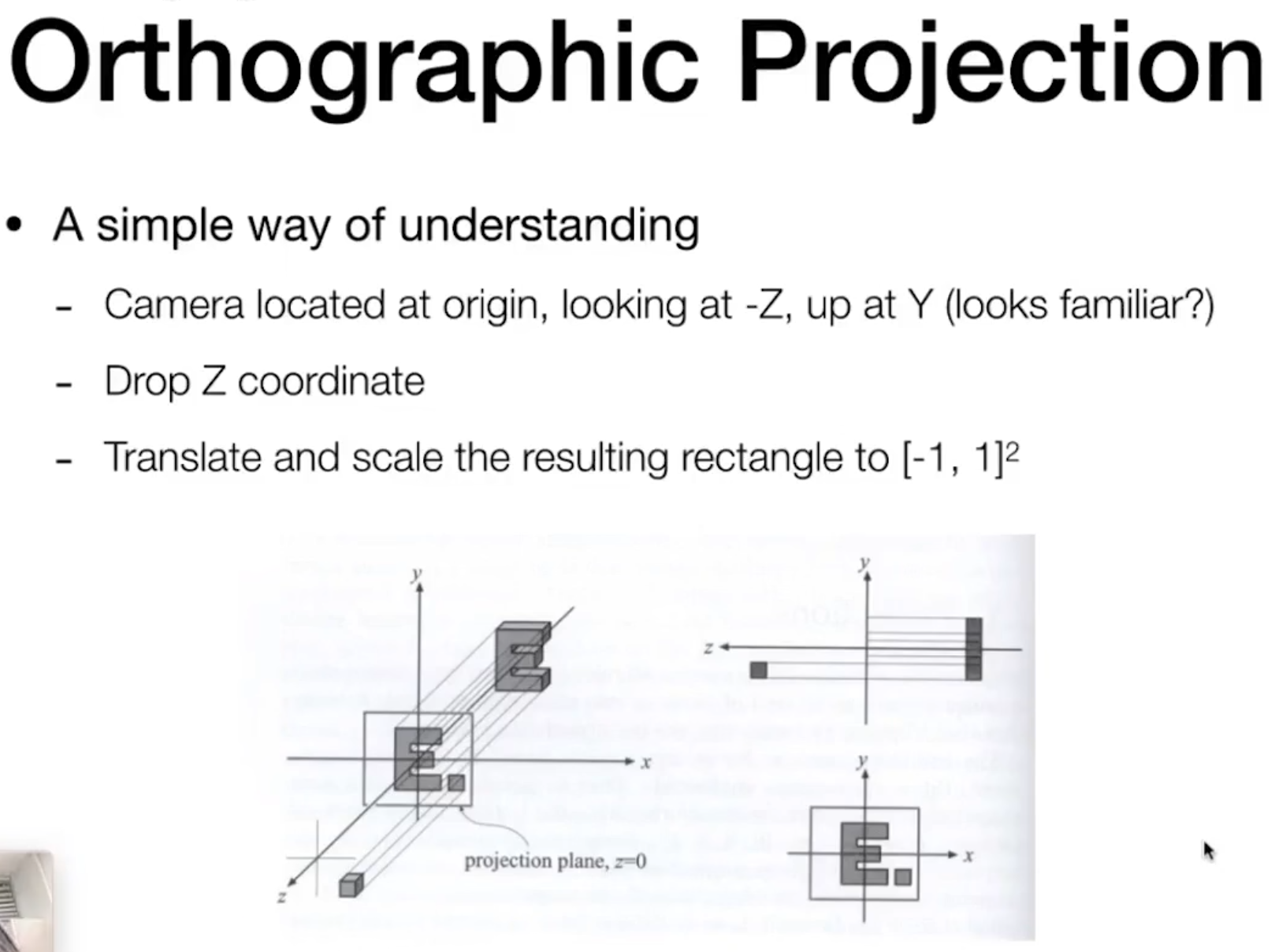
正交透视,能够把z轴的信息过滤掉,坏处就是难以看到物品的前后位置。
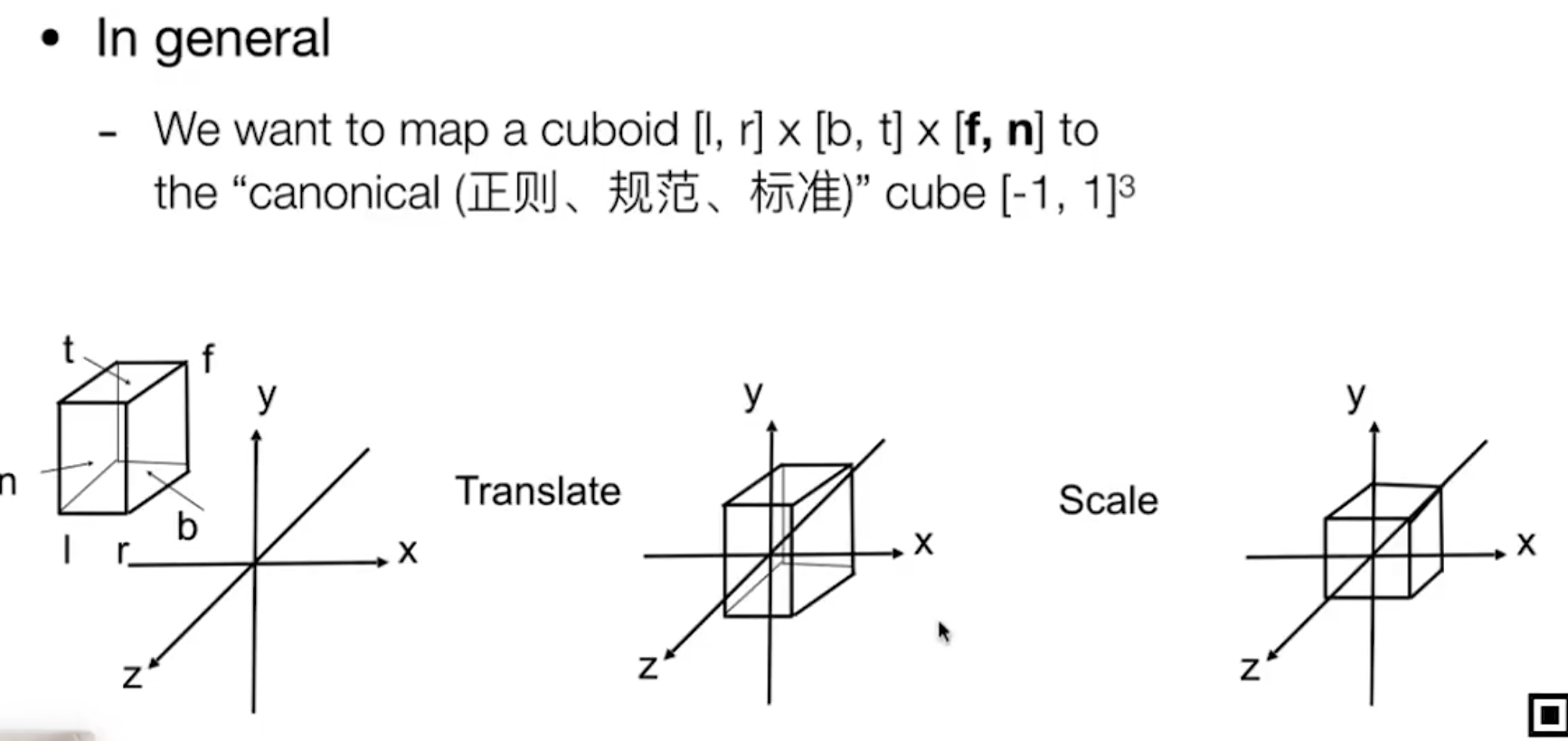
通常来说,将一个长方体 映射 为 一个标准立方体。
步骤1.放到坐标系中。 2.缩放变成标准1的 则变成了一个立方体。
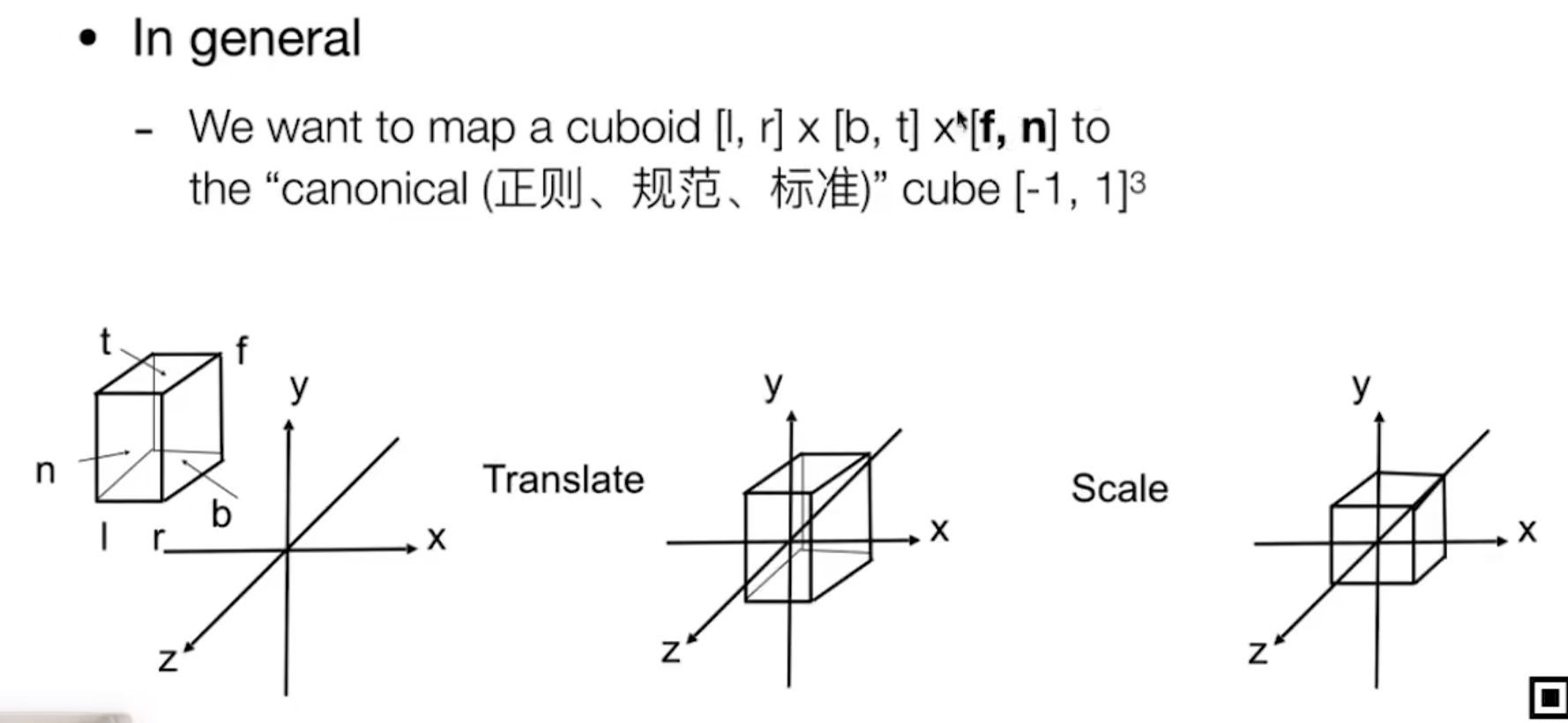
一个比较有意思的是,这里的字母f和n的意思是fast 和 next。 但是由于我们的摄像机视角是-z,因此其实f(远) 是小于 n(*)。
将这个变换写以矩阵的形式写出来。
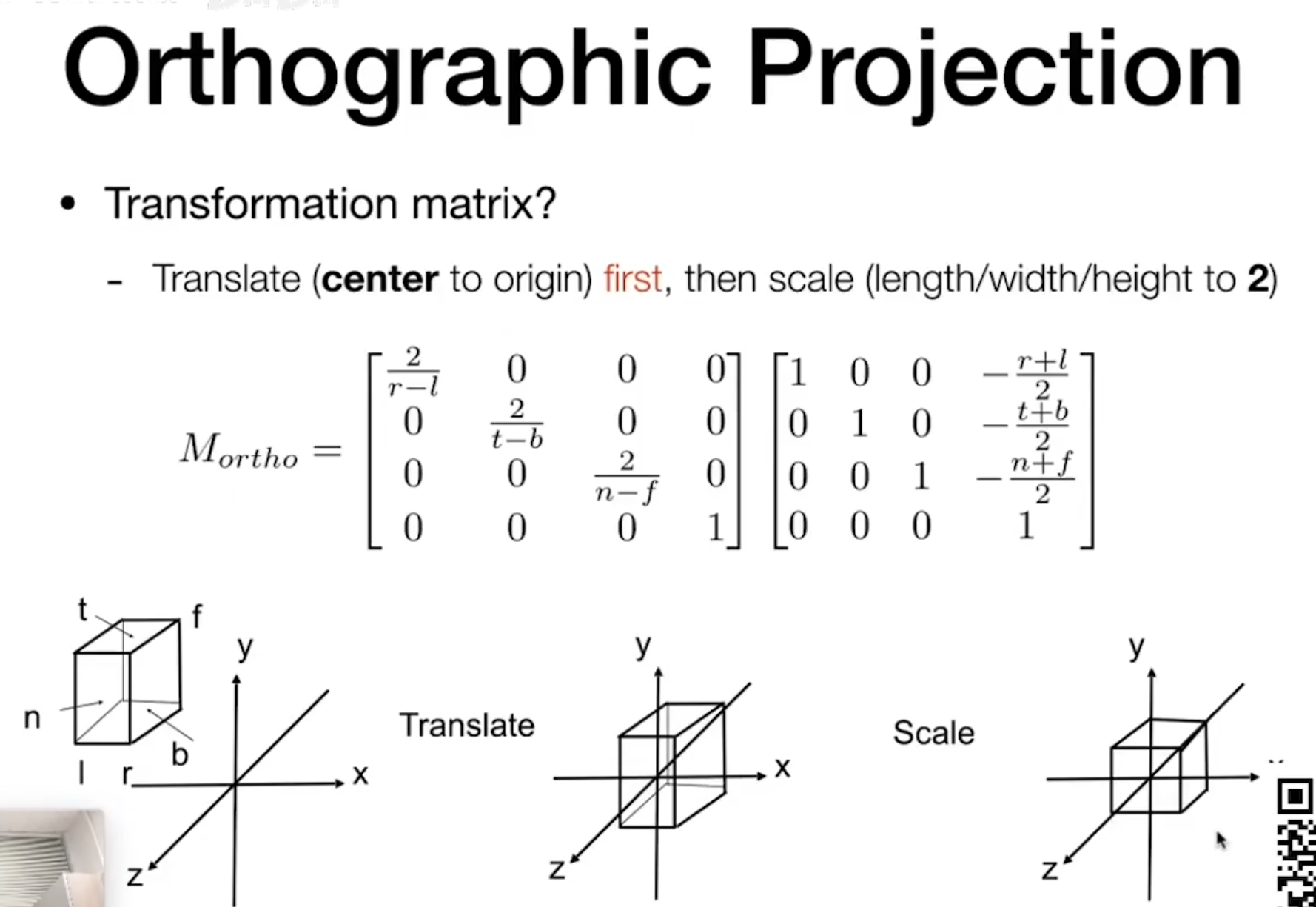
先进行位移,然后在进行scale变换。
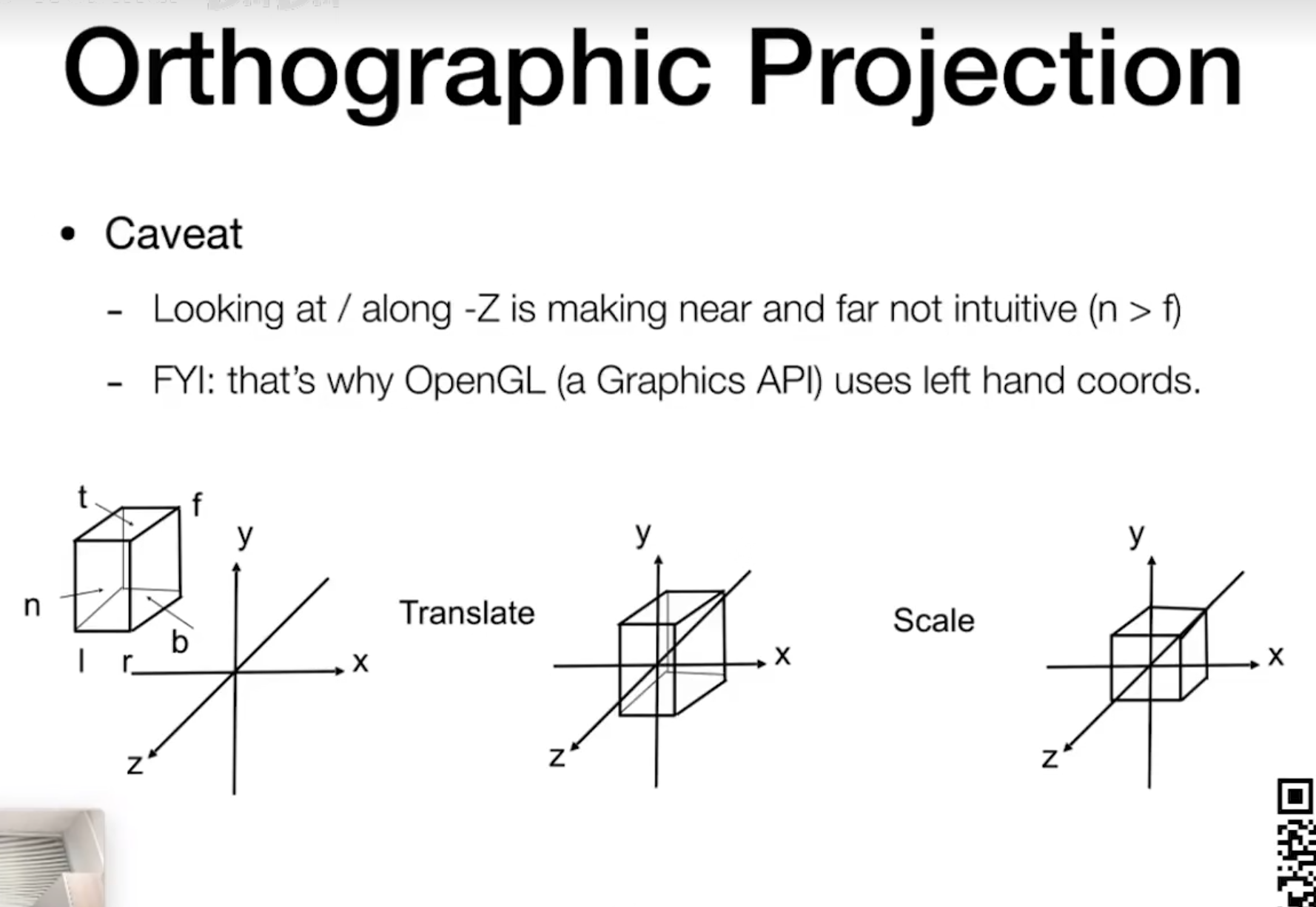
刚刚说了,由于我们是从-z的方向看过来的,因此 f < n 。这就是为什么OpenGL的API使用作左手坐标系以达成f > n的效果。
透视投影(Perspective Projection)
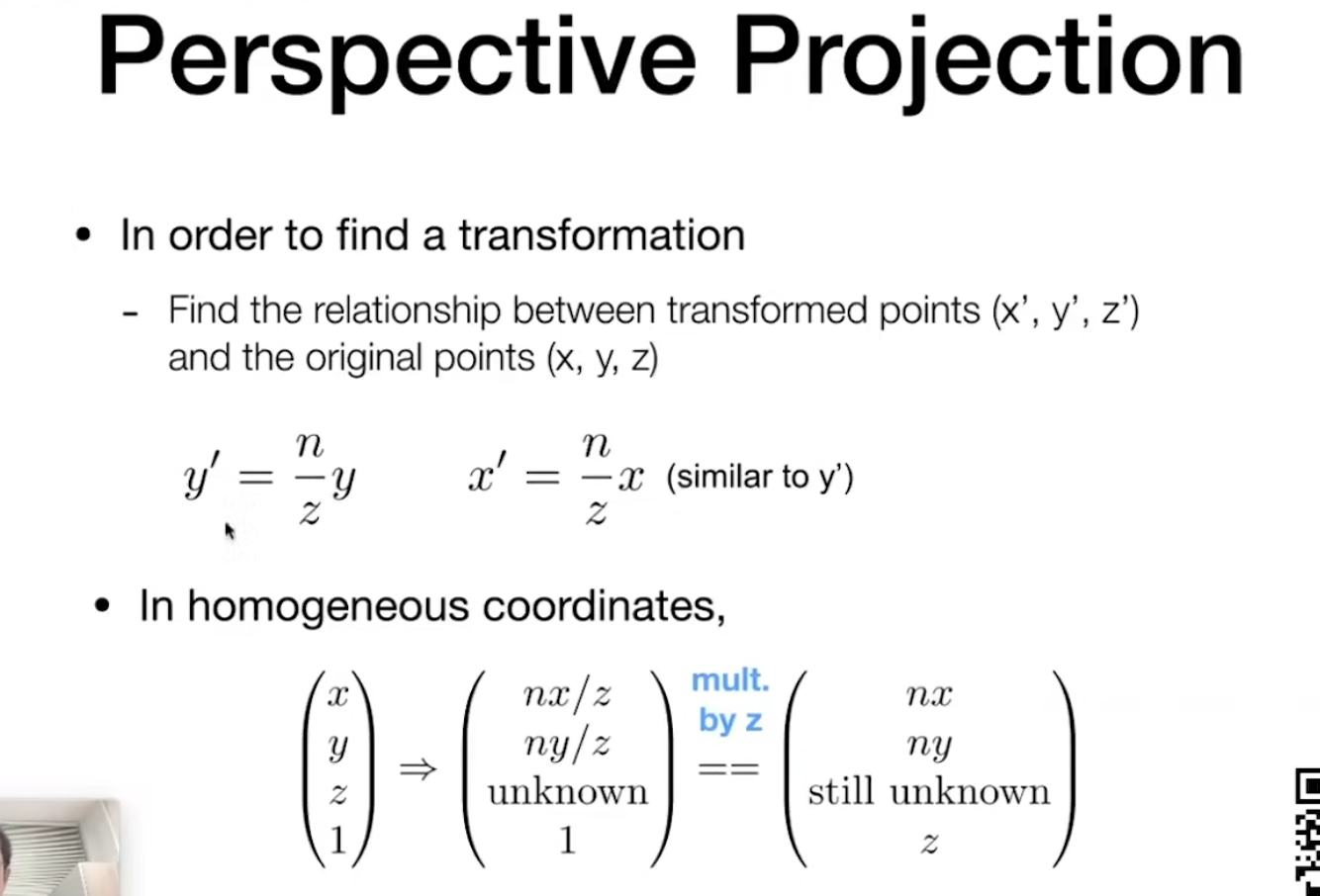
之前说的(x,y,z,1) 全部都 k(k不等于0) 得到(kx,ky,kz,k != 0) 或者甚至 * z(xz,yz,z*方,z != 0) 都是在三维空间中表示同一个点。(z要干嘛?)
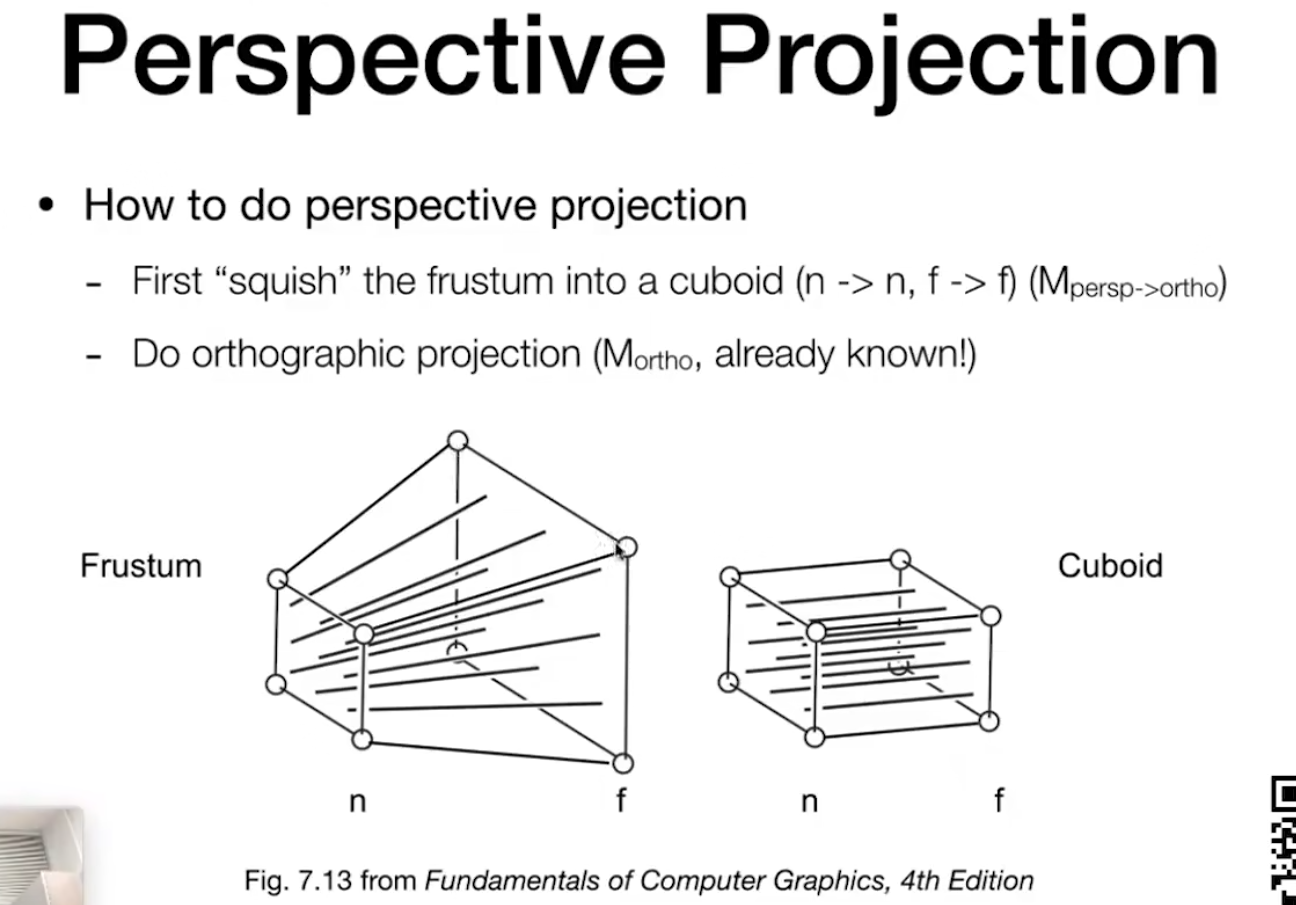
如何理解? 很多图形学教材硬生生把透视投影写为数学公式,写一个矩阵出来,不太好理解。可以假设拿着一个远*面,这个远*面上有四个点。我们强行的把这四个点挤到*小*面去。那此时就挤成了一个空间中长方体。之后再经过正交投影到**面上去了。 总结下来就两步,第一步,先将Frustum的长方体挤成一个长方体,然后再做一次正交投影。
如何 挤
首先规定*** 远 *面 和 中心 **永远不变。
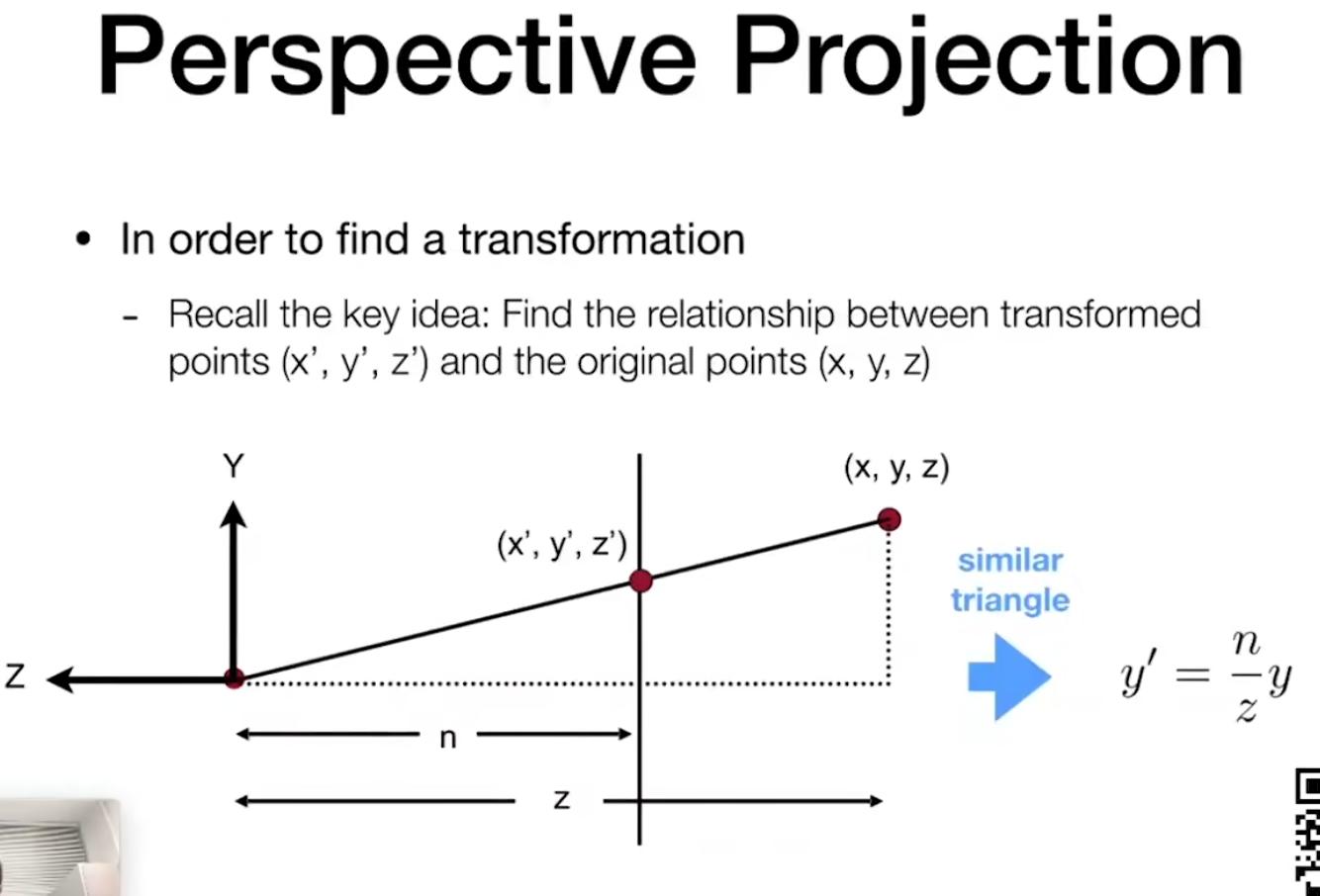
根据 相似三角形 来理解,很好理解。
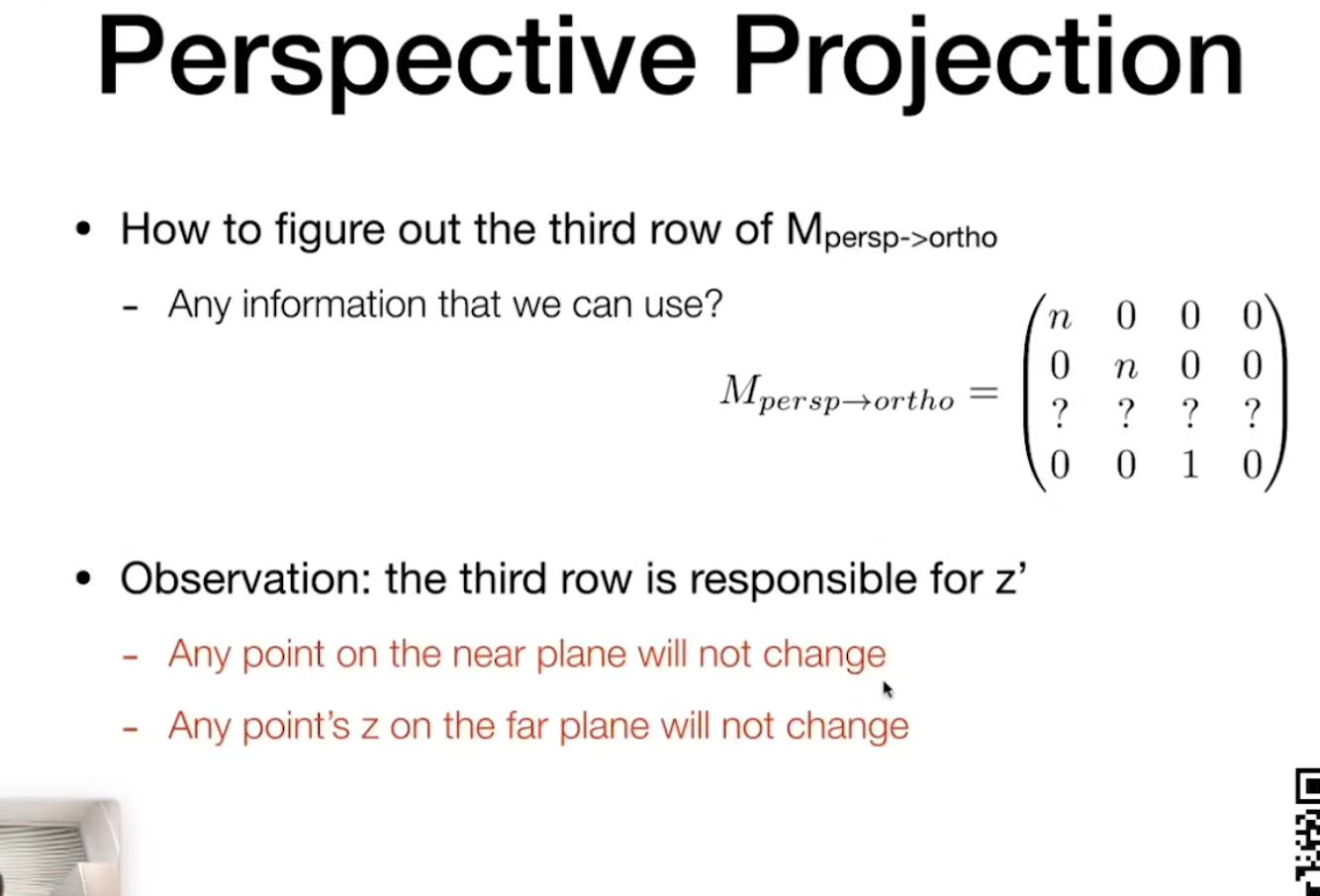
有两个小的观察
1. 任何一个点在**面上都不会发生变换。
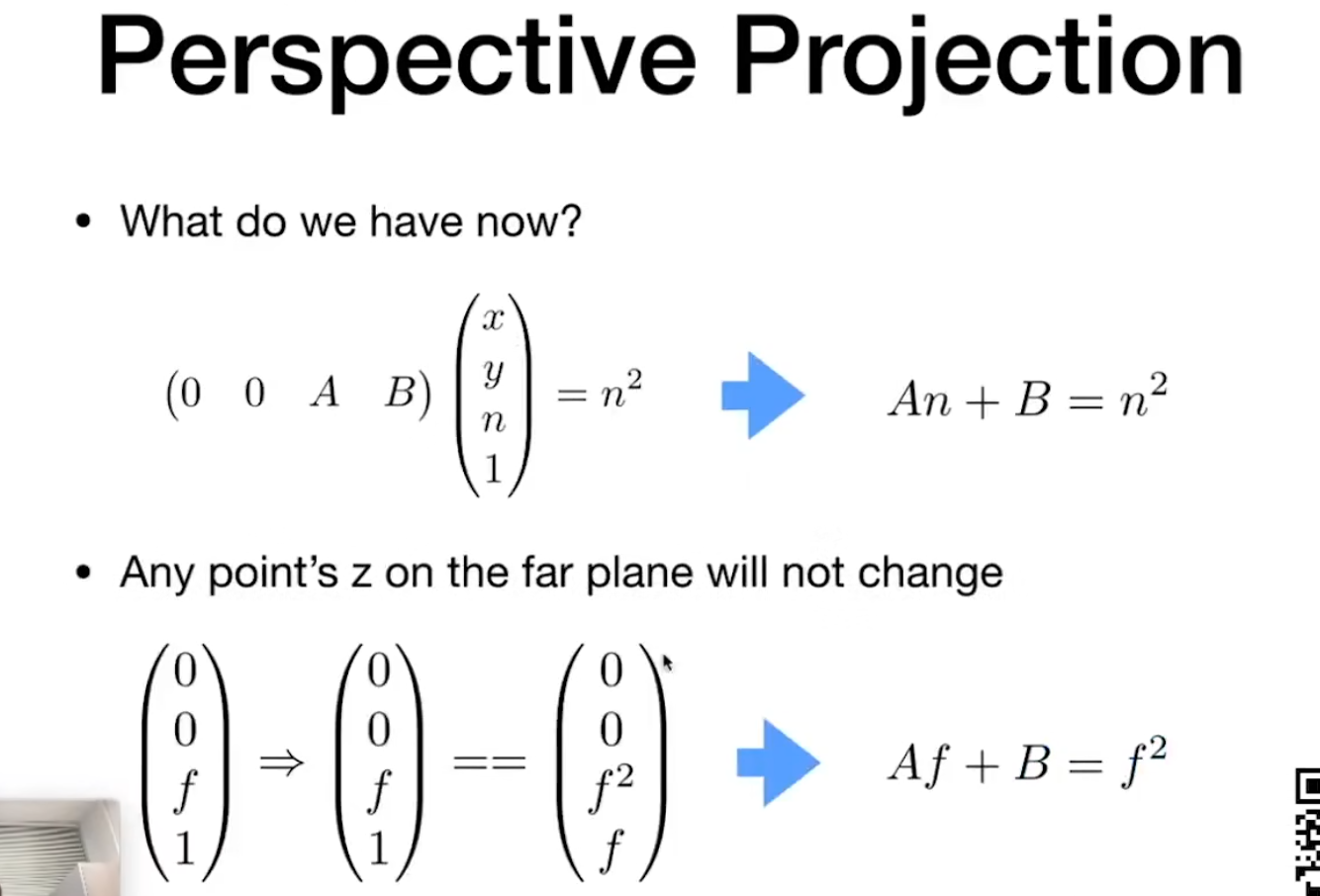
2. 任何一个点的z在远*面上都不会发生变换。
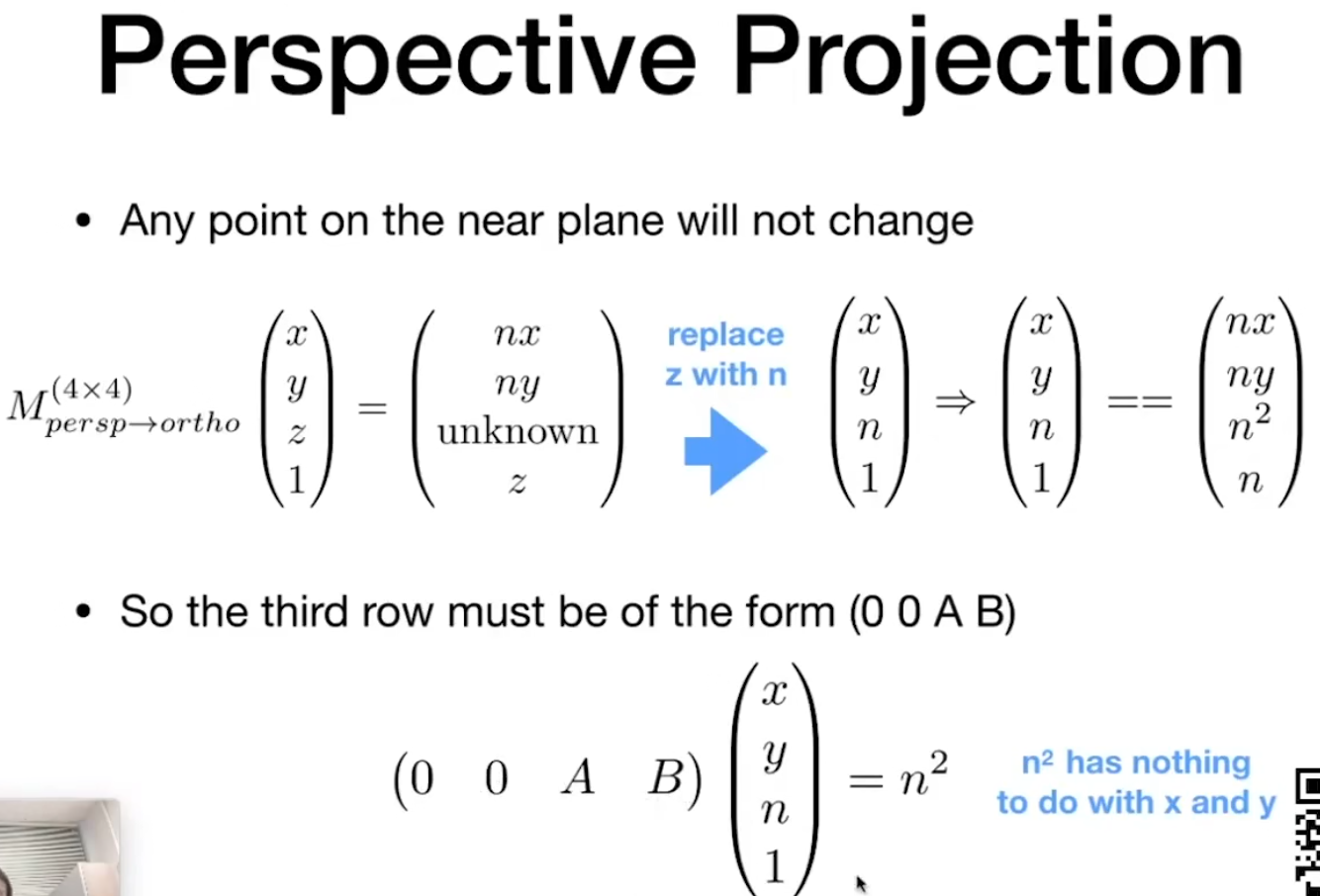
这里用了性质1,还有性质2呢。
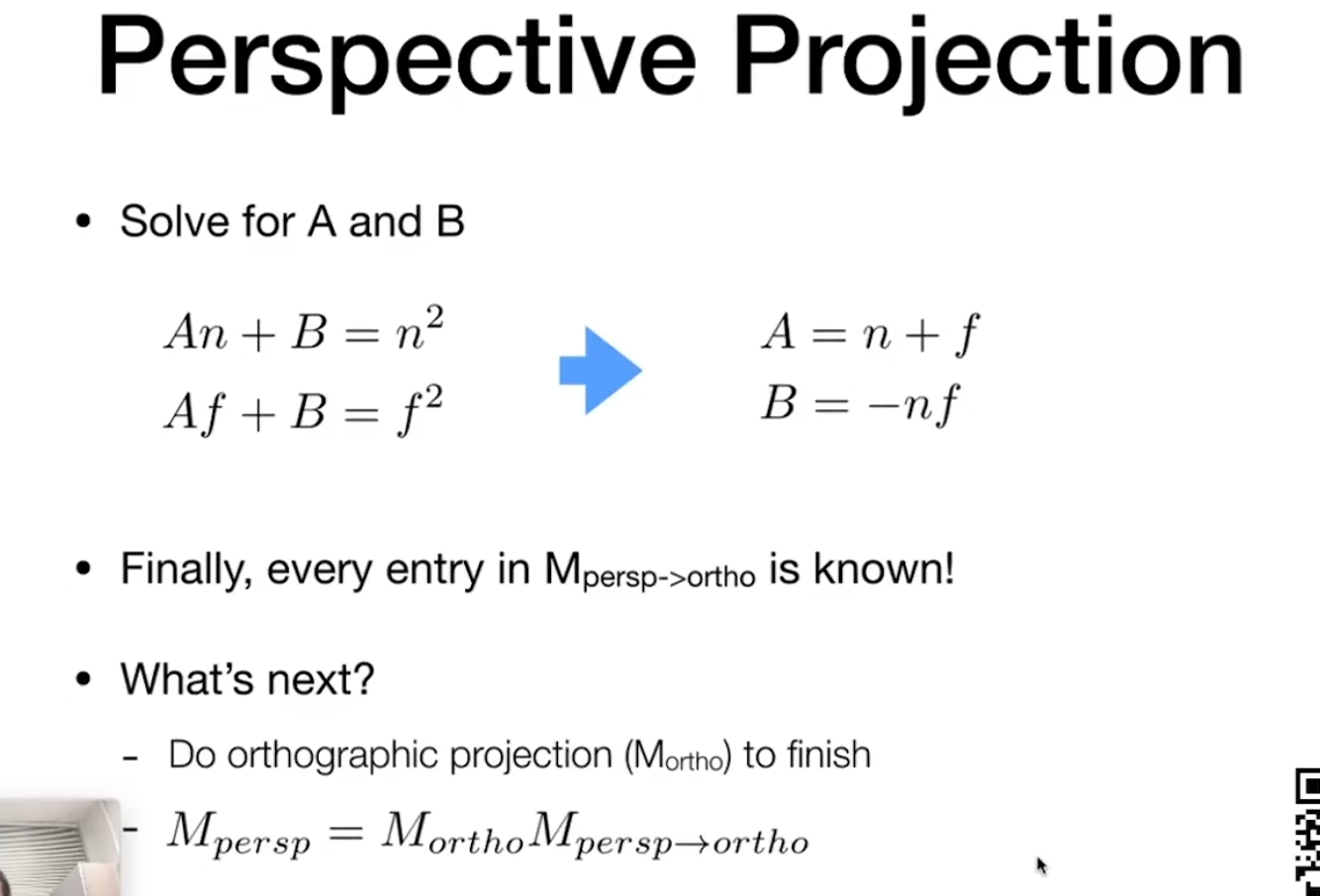
留下一个问题: 我们说**面和远*面的z不会发生改变,那不在**面和远*面的点的z值如何变换呢?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号