

fastlio工程化工作
fastlio fastlio2 pointlio 都是港大开源的很好的工作
其中fastlio2是对fastlio的升级 没有使用特征提取 使用gicp方式做点到面的约束 pointlio没有使用迭代卡尔曼滤波方式进行优化 也没有做针对scan的运动补偿 而是针对scan中的每一个点的时间都做了观测。
针对激光建图来说fastlio的效果更佳 针对定位来说pointlio的速度更快 所以推荐使用fastlio成图 用pointlio定位
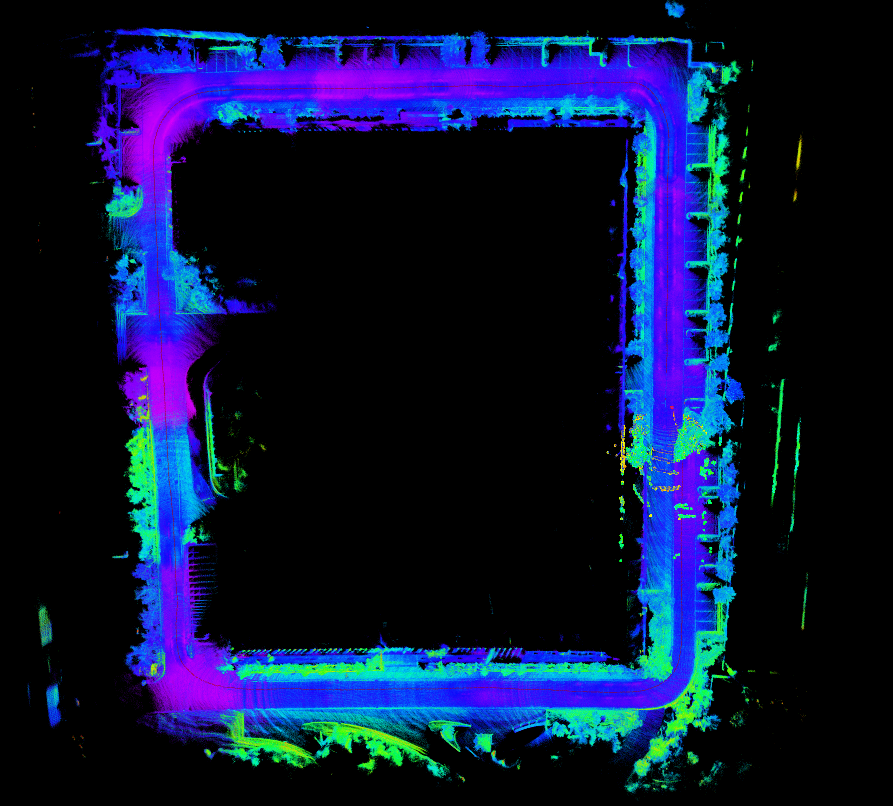
补盲雷达:fov:V 120 H 70 针对环绕场景在没有加入回环算法 定位偏差较大 xy方向会偏移2m 左右 但是不会发生z轴偏移 因为H方向的观测较多
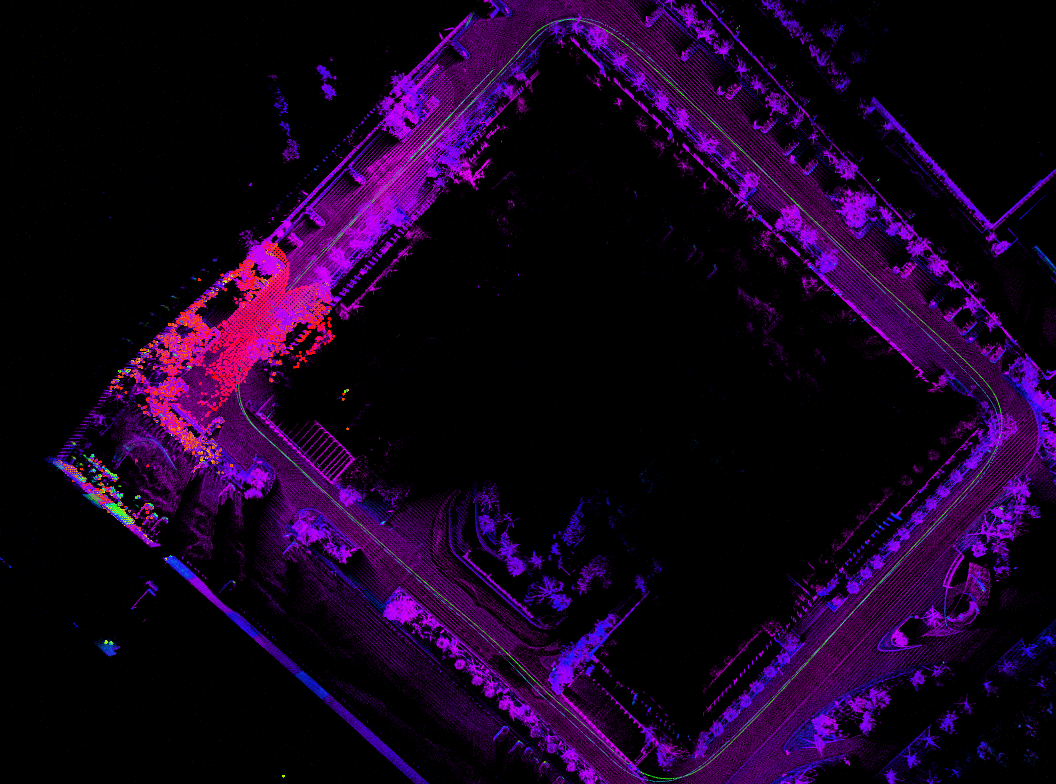
固态雷达:fov:V 120 H 15 z方向偏移较大 在10m左右 H方向的约束太少 加上地面地面约束后 效果变好
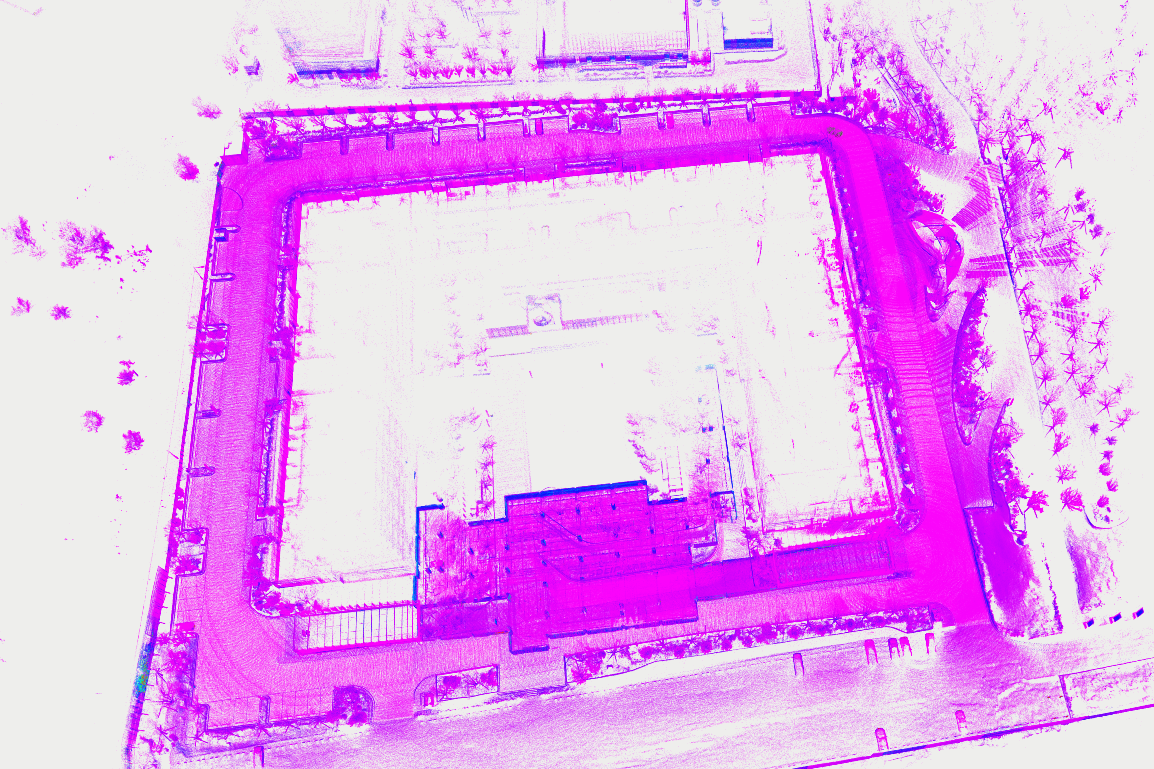
机械雷达:64线固态激光 fov H 40 建图效果很清晰 没有z方向偏移

 浙公网安备 33010602011771号
浙公网安备 33010602011771号