
雷达目标航迹跟踪与数据处理
雷达目标航迹跟踪与数据处理
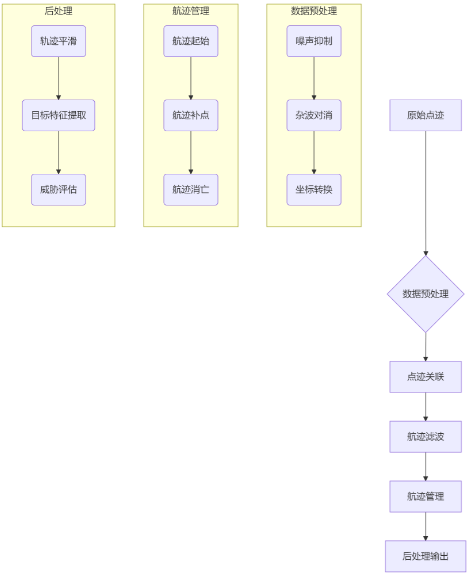
一、雷达数据处理流程架构
二、关键算法实现
1. 数据预处理
% 杂波抑制(CFAR算法)
function [clean_data] = cfar_suppress(raw_data, guard_cells, training_cells)
num_cells = size(raw_data,1);
clean_data = zeros(size(raw_data));
for i = 1:num_cells
guard = raw_data(max(1,i-guard_cells):min(num_cells,i+guard_cells));
train = raw_data([1:i-guard_cells-1, i+guard_cells+1:end]);
threshold = mean(train) + 3*std(train);
clean_data(i) = raw_data(i) > threshold;
end
end
% 坐标转换(极坐标→直角坐标)
function [x,y,z] = polar2cart(r,az,el)
x = r .* sin(el) .* cos(az);
y = r .* sin(el) .* sin(az);
z = r .* cos(el);
end
2. 点迹关联算法
% 概率数据关联滤波(PDAF)
function [assoc_prob] = pdaf_assoc(meas, tracks, gate_size)
num_tracks = size(tracks,1);
assoc_prob = zeros(num_tracks,1);
for i = 1:num_tracks
predicted = predict_track(tracks(i).state);
dist = sqrt(sum((meas - predicted).^2,2));
assoc_prob(i) = sum(exp(-0.5*(dist/gate_size).^2));
end
assoc_prob = assoc_prob / sum(assoc_prob);
end
% 联合概率数据关联(JPDAF)
function [assoc_matrix] = jpdaf_assoc(meas, tracks, gate_size)
num_meas = size(meas,1);
num_tracks = size(tracks,1);
assoc_matrix = zeros(num_meas,num_tracks);
for m = 1:num_meas
for t = 1:num_tracks
if norm(meas(m,:) - tracks(t).predicted) < gate_size
assoc_matrix(m,t) = compute_joint_prob(m,t,meas,tracks);
end
end
end
end
3. 航迹滤波优化
% 扩展卡尔曼滤波(EKF)实现
function [x_est, P_est] = ekf_update(x_pred, P_pred, z, H, R)
K = P_pred*H'/(H*P_pred*H' + R);
x_est = x_pred + K*(z - H*x_pred);
P_est = (eye(size(x_pred)) - K*H)*P_pred;
end
% 无迹卡尔曼滤波(UKF)实现
function [x_est, P_est] = ukf_update(x_pred, P_pred, z, obs_model)
[sigma_points, weights] = gen_sigma_points(x_pred, P_pred);
sigma_obs = obs_model(sigma_points);
x_pred = sum(weights.*sigma_obs,2);
P_pred = cov(sigma_obs) - weights*(sigma_obs - x_pred)*cov(sigma_obs)';
K = P_pred*obs_jacobian'/det(obs_jacobian*P_pred*obs_jacobian');
x_est = x_pred + K*(z - obs_model(x_pred));
P_est = (eye(size(x_pred)) - K*obs_jacobian)*P_pred;
end
三、航迹管理策略
1. 航迹起始判定
- 多帧确认法:连续3帧满足距离/速度一致性
- 统计阈值法:\(P_{init} = \frac{\sum_{k=1}^N \mathcal{N}(z_k|\mu, \Sigma)}{N} > 0.9\)
2. 航迹补点算法
% 匀加速模型补点
function [compensated] = compensate_track(track, dt)
a = track.a; % 加速度估计
compensated.x = track.x + track.vx*dt + 0.5*a*dt^2;
compensated.vx = track.vx + a*dt;
end
3. 航迹消亡机制
- 失跟帧数阈值:连续5帧未更新则标记失效
- 质量评估函数:
\(Q = \frac{\sigma_v^{-2}}{\sigma_v^{-2} + \sigma_{meas}^{-2}}\)
当Q<0.1时触发消亡
四、多目标跟踪优化
1. 多假设跟踪(MHT)
% 假设生成函数
function hypotheses = generate_hypotheses(tracks, meas)
num_tracks = size(tracks,1);
num_meas = size(meas,1);
hypotheses = cell(num_meas,num_tracks);
for m = 1:num_meas
for t = 1:num_tracks
if gate_test(meas(m,:), tracks(t).state)
hypotheses{m,t} = [tracks(t).state; meas(m,:)];
end
end
end
end
2. 交互多模型(IMM)
% 模型概率更新
function [P] = imm_update(P_prev, likelihood)
P = P_prev .* likelihood;
P = P / sum(P);
end
% 模型混合
function [x_mix, P_mix] = model_mix(models, P)
num_models = size(models,1);
x_mix = zeros(size(models(1).state));
P_mix = zeros(size(models(1).state));
for m = 1:num_models
x_mix = x_mix + P(m)*models(m).state;
P_mix = P_mix + P(m)*models(m).cov;
end
end
参考代码 雷达目标航迹跟踪 youwenfan.com/contentcnb/50811.html
五、工程实现优化
1. 并行计算加速
% GPU加速点迹关联
gpu_meas = gpuArray(meas);
parfor i = 1:num_tracks
gpu_assoc(i) = pdaf_assoc(gpu_meas, tracks(i).state);
end
assoc_prob = gather(gpu_assoc);
2. 内存优化策略
-
环形缓冲区:限制历史数据存储量
-
分块处理:将大规模数据分块处理
block_size = 1000; for i = 1:block_size:data_size process_block(data(i:i+block_size-1)); end
3. 实时性保障
- 多级流水线:预处理→关联→滤波并行处理
- 优先级调度:高置信度目标优先处理
六、性能评估指标
| 指标 | 计算公式 | 典型值 |
|---|---|---|
| 跟踪精度 | RMSE = \(\sqrt{\frac{1}{N}\sum(\hat{x}-x)^2}\) | <3m (1σ) |
| 虚警率(Pfa) | \(\frac{N_{fa}}{N_{total}}\) | <0.1% |
| 数据延迟 | \(t_{process} - t_{measure}\) | <20ms |
| 内存占用 | 峰值内存使用量 | <2GB |
七、典型应用场景
- 军事防空系统
- 多目标跟踪(MTT)处理弹道导弹突防
- 低空突防目标检测(结合地形匹配)
- 智能交通监控
- 车辆轨迹预测(基于历史路径分析)
- 交通流量密度估计(3D点云处理)
- 无人机集群协同
- 多机协同目标追踪(分布式卡尔曼滤波)
- 动态避障航迹规划(速度障碍法)
八、挑战与解决方案
| 挑战 | 解决方案 |
|---|---|
| 密集目标关联混淆 | 改进JPDAF算法 + 引入目标运动特征约束 |
| 机动目标跟踪失效 | 交互多模型(IMM) + 自适应过程噪声估计 |
| 非高斯噪声干扰 | 粒子滤波(PF) + 重采样优化 |
| 实时性要求 | FPGA硬件加速 + 分布式计算架构 |
九、MATLAB仿真示例
%% 雷达数据仿真
N = 1000; % 点迹数
true_traj = generate_trajectory('helix', N); % 生成螺旋轨迹
meas = add_noise(true_traj, SNR=20); % 添加高斯噪声
%% 航迹跟踪处理
tracks = cell(1,N);
for k = 1:N
if k==1
tracks{k} = init_track(meas(k,:)); % 初始化航迹
else
tracks{k} = update_track(tracks{k-1}, meas(k,:), PDAF); % 更新航迹
end
end
%% 结果可视化
figure;
plot3(tracks{end}.x, tracks{end}.y, tracks{end}.z);
hold on;
plot3(true_traj(:,1), true_traj(:,2), true_traj(:,3),'r--');
legend('估计轨迹','真实轨迹');
title('三维航迹跟踪结果');
通过上述方法体系,可构建高效可靠的雷达目标跟踪系统。实际工程中需根据具体场景调整参数,并持续进行算法验证与优化。建议采用模块化设计,便于算法迭代升级和硬件部署。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号