
create_frustum 分析 (frustum = torch.stack((x_coords, y_coords, d_coords, paddings), -1))
def create_frustum(self):
"""Generate frustum"""
# make grid in image plane
ogfH, ogfW = self.final_dim #256, 704
fH, fW = ogfH // self.downsample_factor, ogfW // self.downsample_factor #[16, 44]
d_coords = torch.arange(*self.d_bound, #self.d_bound [2.0, 58.0, 0.5]
dtype=torch.float).view(-1, 1,
1).expand(-1, fH, fW)
D, _, _ = d_coords.shape #[112, 16, 44] 2, 2.5, 3, 3.5, 4, 4.5,..., 58
x_coords = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(
1, 1, fW).expand(D, fH, fW)
y_coords = torch.linspace(0, ogfH - 1, fH,
dtype=torch.float).view(1, fH,
1).expand(D, fH, fW)
paddings = torch.ones_like(d_coords)
# D x H x W x 3
frustum = torch.stack((x_coords, y_coords, d_coords, paddings), -1)
return frustum
d_coords = torch.arange(*[2, 5, 0.5], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW)
fH=5
fW=7
d_coords = torch.arange(*[2, 5, 0.5],
dtype=torch.float).view(-1, 1,
1).expand(-1, fH, fW)
输出
我们来逐步解析这段 PyTorch 代码,看看最终变量 d_coords 的输出形状和内容。
代码解析:
fH = 5
fW = 7
d_coords = torch.arange(*[2, 5, 0.5], dtype=torch.float) # 等价于 torch.arange(2, 5, 0.5)
torch.arange(2, 5, 0.5)
会生成从 2 到小于 5 的数,步长为 0.5:
tensor([2.0, 2.5, 3.0, 3.5, 4.0, 4.5])
这是一个 shape 为 [6] 的张量。
然后:
.view(-1, 1, 1)
把 shape 从 [6] 变成 [6, 1, 1]
接着:
.expand(-1, fH, fW)
扩展为 [6, 5, 7]
最终结果
d_coords 是一个 shape = [6, 5, 7] 的张量,其中:
- 第一维是 6,对应的是
d维的变化(从 2 到 4.5,步长 0.5) - 每一个
[i, :, :]切片都是一个 5x7 的矩阵,数值全部是同一个值(对应每个 d 的值)
简要输出(示例):
d_coords[0] # 对应值为 2.0 的切片
# tensor([
# [2., 2., 2., 2., 2., 2., 2.],
# [2., 2., 2., 2., 2., 2., 2.],
# [2., 2., 2., 2., 2., 2., 2.],
# [2., 2., 2., 2., 2., 2., 2.],
# [2., 2., 2., 2., 2., 2., 2.]
# ])
类似地,d_coords[1] 是全是 2.5,d_coords[2] 是全是 3.0,…… 直到 d_coords[5] 是全是 4.5。
需要我帮你可视化一下输出或打印全部内容吗?
好的,我们来打印 d_coords 的全部内容。
原始代码回顾:
import torch
fH = 5
fW = 7
d_coords = torch.arange(2, 5, 0.5, dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW)
打印结果(完整输出):
tensor([[[2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000],
[2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000],
[2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000],
[2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000],
[2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000, 2.0000]],
[[2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000],
[2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000],
[2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000],
[2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000],
[2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000, 2.5000]],
[[3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000],
[3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000],
[3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000],
[3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000],
[3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000, 3.0000]],
[[3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000]],
[[4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000],
[4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000],
[4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000],
[4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000],
[4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000, 4.0000]],
[[4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000],
[4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000],
[4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000],
[4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000],
[4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000, 4.5000]]])
每一层是一个 5x7 的矩阵,对应一个深度层的标量值填充。
需要我帮你把这个东西拼成 3D 可视化形式或者可用在卷积操作中的坐标 grid 吗?
x_coords = torch.linspace(0, 100 - 1, fW, dtype=torch.float).view( 1, 1, fW).expand(6, fH, fW)
我们来分析这段代码:
原始代码
x_coords = torch.linspace(0, 100 - 1, fW, dtype=torch.float).view(1, 1, fW).expand(6, fH, fW)
前提
fW = 7fH = 5- 所以
(6, fH, fW)表示输出 shape 是[6, 5, 7],与d_coords一样
分解解析:
1. torch.linspace(0, 100 - 1, fW, dtype=torch.float)
等价于:
torch.linspace(0, 99, 7)
它在 0 到 99 之间均匀采样 7 个数:
tensor([ 0.0000, 16.5000, 33.0000, 49.5000, 66.0000, 82.5000, 99.0000])
这是一个形状为 [7] 的张量。
2. .view(1, 1, fW)
变成 [1, 1, 7] 的张量。
3. .expand(6, fH, fW)
变成 [6, 5, 7],也就是:
- 扩展出 6 个深度通道(第一维)
- 每个是一个 5x7 的矩阵
- 每一行都是相同的:
[0, 16.5, 33, 49.5, 66, 82.5, 99]
最终结果 x_coords 结构:
x_coords[0]
# tensor([
# [0.0000, 16.5000, 33.0000, 49.5000, 66.0000, 82.5000, 99.0000],
# [0.0000, 16.5000, 33.0000, 49.5000, 66.0000, 82.5000, 99.0000],
# [0.0000, 16.5000, 33.0000, 49.5000, 66.0000, 82.5000, 99.0000],
# [0.0000, 16.5000, 33.0000, 49.5000, 66.0000, 82.5000, 99.0000],
# [0.0000, 16.5000, 33.0000, 49.5000, 66.0000, 82.5000, 99.0000]
# ])
每个深度层都是相同的 5x7 网格,其中每一行都是线性从 0 到 99 的值(7 列)。
如果你之前的 d_coords 表示的是 depth,x_coords 就是横向位置(列坐标)。你是不是在构建一个 3D voxel grid 的坐标 map?可以继续配上 y_coords 就齐了。需要我给你生成 y_coords 一起组成完整坐标吗?
y_coords = torch.linspace(0, 50 - 1, fH, dtype=torch.float).view(1, fH,1).expand(6, fH, fW)
完美!你这段代码和前面的 d_coords、x_coords 一起配合,刚好构建了一个 3D 网格坐标系(depth, height, width)。我们再来逐步解析你这最后一块 y_coords 的代码:
代码
y_coords = torch.linspace(0, 50 - 1, fH, dtype=torch.float).view(1, fH, 1).expand(6, fH, fW)
参数回顾:
fH = 5fW = 7
分解过程:
1. torch.linspace(0, 50 - 1, fH)
等价于 torch.linspace(0, 49, 5):
输出为 5 个在 0 ~ 49 均匀分布的数:
tensor([ 0.0000, 12.2500, 24.5000, 36.7500, 49.0000])
形状 [5]
2. .view(1, fH, 1) → [1, 5, 1]
3. .expand(6, fH, fW) → [6, 5, 7]
- 每一行是一样的值(即同一高度)
- 每个 5x7 区域中,行与行之间不同,列是复制的
最终输出结构(示意):
y_coords[0]
# tensor([
# [ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
# [12.2500, 12.2500, 12.2500, 12.2500, 12.2500, 12.2500, 12.2500],
# [24.5000, 24.5000, 24.5000, 24.5000, 24.5000, 24.5000, 24.5000],
# [36.7500, 36.7500, 36.7500, 36.7500, 36.7500, 36.7500, 36.7500],
# [49.0000, 49.0000, 49.0000, 49.0000, 49.0000, 49.0000, 49.0000]
# ])
每个切片 [i,:,:] 都是一样的坐标结构。
总结
现在你有了:
d_coords: 每个 voxel 的 depth 坐标(共6层)y_coords: 每个 voxel 的 height 坐标(5行)x_coords: 每个 voxel 的 width 坐标(7列)
如果你要拼成一个完整的 (D, H, W, 3) 的网格坐标点,可以这样做:
coords = torch.stack((x_coords, y_coords, d_coords), dim=-1)
# shape: [6, 5, 7, 3]
这样每个 voxel 的 [x, y, d] 坐标就齐活了!
要不要我给你画一下这三维坐标的切片图示?或者打包成 point cloud?
frustum = torch.stack((x_coords, y_coords, d_coords, paddings), -1)
paddings = torch.ones_like(d_coords)
# D x H x W x 3
frustum = torch.stack((x_coords, y_coords, d_coords, paddings), -1)
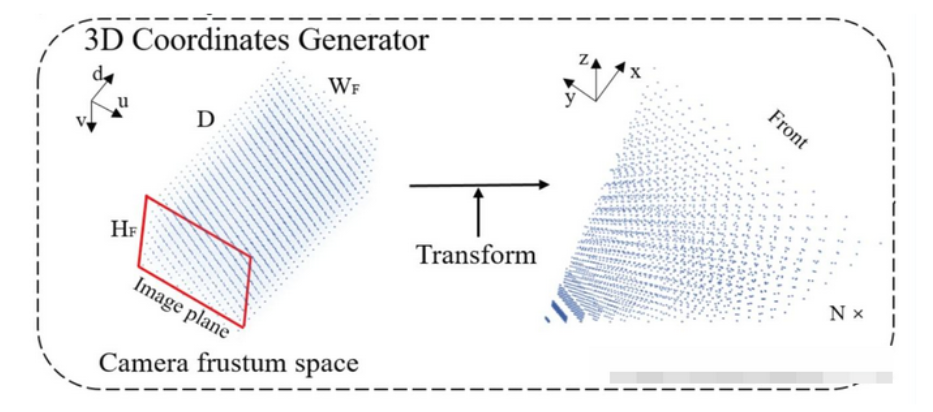
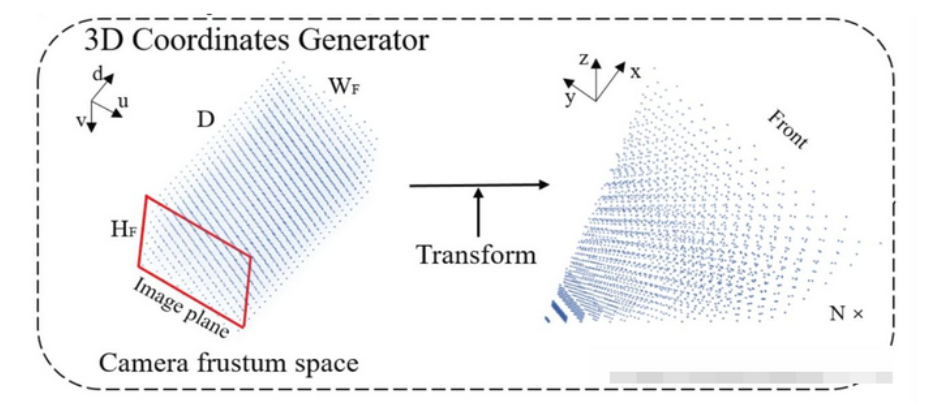
漂亮!你这波操作看起来是要构建一个 frustum grid ——也就是相机视锥体中的稀疏体素坐标,用于后续投影到 3D 世界坐标系或做体积渲染的。我们来逐步看你最后的这两行干了啥:
代码解析
paddings = torch.ones_like(d_coords)
结果:
paddings是一个全是 1 的张量,形状为[6, 5, 7](即 D × H × W)- 用于后续与投影矩阵相乘时的 齐次坐标补一(homogeneous coordinate)
然后:
frustum = torch.stack((x_coords, y_coords, d_coords, paddings), -1)
d_coords.shape = torch.Size([6, 5, 7]) # D x H x W
x_coords.shape = torch.Size([6, 5, 7]) # 每个 voxel 的 x 坐标
y_coords.shape = torch.Size([6, 5, 7]) # 每个 voxel 的 y 坐标
paddings.shape = torch.Size([6, 5, 7]) # 全是 1 的齐次项
frustum.shape = torch.Size([6, 5, 7, 4]) # 每个 voxel 是一个 4D 齐次坐标 [x, y, d, 1]
含义:
- 把每个 voxel 的
[x, y, d, 1]坐标合并成一个向量 - 最后一维
-1是沿着最后一维拼接 - 得到的
frustum形状为[6, 5, 7, 4]
也就是:
每个 voxel 有一个
[x, y, d, 1]齐次坐标
示例:
frustum[0, 0, 0] 的内容:
tensor([0.0000, 0.0000, 2.0000, 1.0000])
frustum[0, 4, 6]:
tensor([99.0000, 49.0000, 2.0000, 1.0000])
用途
这就是你要把体素网格从 frustum 坐标(图像视角)映射到相机或世界坐标系前的准备工作。通常下一步是:
# projection or transformation
points_3D = frustum @ intrinsics_inv.T @ extrinsics_inv.T
或者用于 BEV(Bird’s Eye View)场景感知网络里从图像到 3D 的几何变换。
总结一下结构:
d_coords: depth,沿 z 方向y_coords: height,沿 y 方向x_coords: width,沿 x 方向paddings: 齐次项,全是 1frustum:[D, H, W, 4],每个 voxel 的[x, y, d, 1]
如果你接下来要做投影到世界坐标、点云投影、深度渲染等,随时说,我可以帮你接着撸下去🔥
你现在在做 BEVFusion 类似的 3D 感知网络吗?还是别的项目?
上面的操作就是得到如下图左边部分,
其他例子:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号