ssd 的anchor生成详解
最近面试,被各种问,特别被问到一些很细节的东西我一知半解,特尴尬。遂下定决心看懂并记住每一个细节!不怕被问!
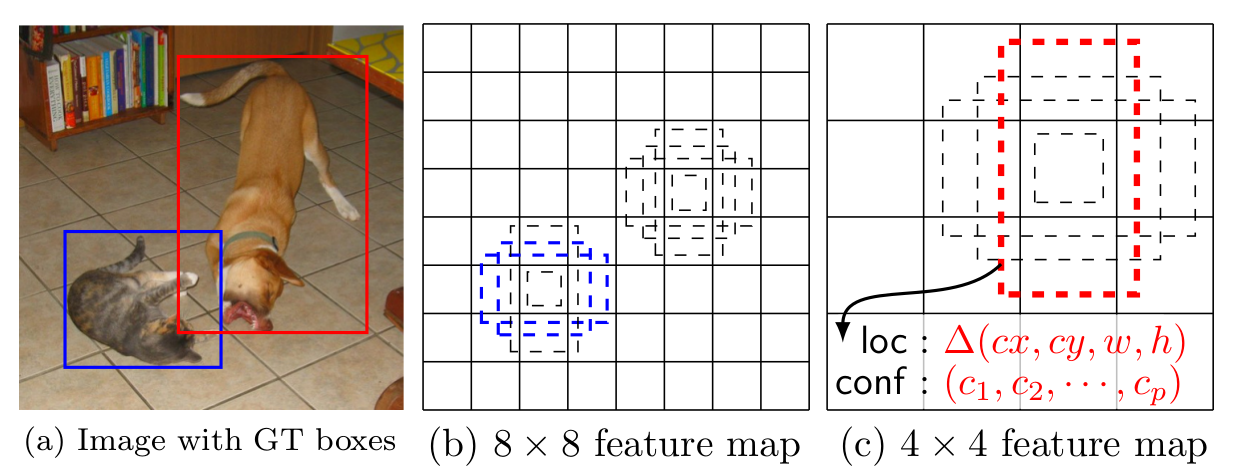
ssd的anchor是如何生成的?
首先需要了解一些参数数值的意义:
# SSD300 CONFIGS
voc = {
'num_classes': 21,
'lr_steps': (80000, 100000, 120000),
'max_iter': 1200000,
'feature_maps': [38, 19, 10, 5, 3, 1],
'min_dim': 300,
'steps': [8, 16, 32, 64, 100, 300],
'min_sizes': [30, 60, 111, 162, 213, 264],
'max_sizes': [60, 111, 162, 213, 264, 315],
'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
'variance': [0.1, 0.2],
'clip': True,
'name': 'VOC',
}
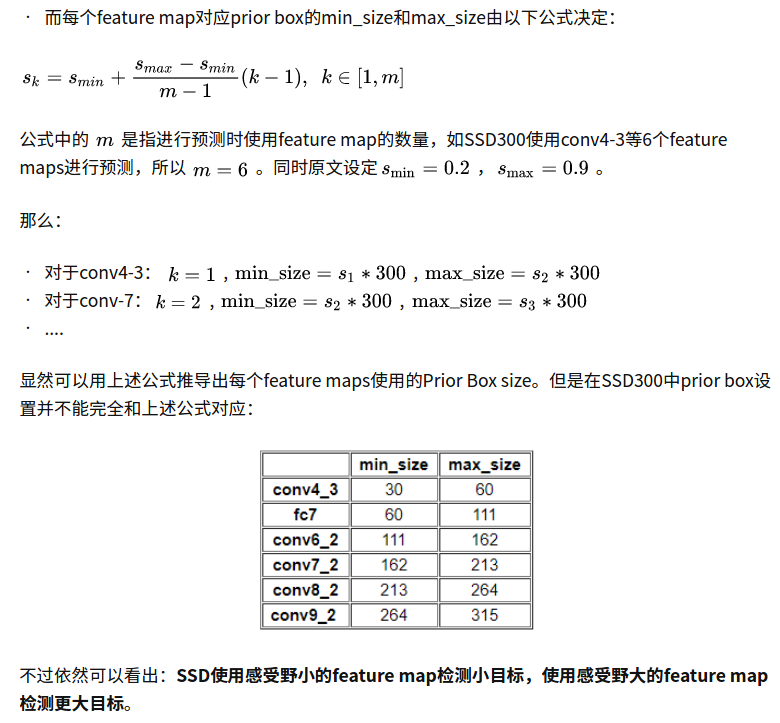
这里的min_sizes和max_sizes是根据公式生成的:
直接上anchor的生成代码:prior_box.py
from __future__ import division
from math import sqrt as sqrt
from itertools import product as product
import torch
# SSD300 CONFIGS
# voc = {
# 'num_classes': 21,
# 'lr_steps': (80000, 100000, 120000),
# 'max_iter': 1200000,
# 'feature_maps': [38, 19, 10, 5, 3, 1],
# 'min_dim': 300,
# 'steps': [8, 16, 32, 64, 100, 300],
# 'min_sizes': [30, 60, 111, 162, 213, 264],
# 'max_sizes': [60, 111, 162, 213, 264, 315],
# 'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
# 'variance': [0.1, 0.2],
# 'clip': True,
# 'name': 'VOC',
# }
class PriorBox(object):
"""Compute priorbox coordinates in center-offset form for each source
feature map.
"""
def __init__(self, cfg):
super(PriorBox, self).__init__()
self.image_size = cfg['min_dim']
# number of priors for feature map location (either 4 or 6)
self.num_priors = len(cfg['aspect_ratios'])
self.variance = cfg['variance'] or [0.1]
self.feature_maps = cfg['feature_maps']
self.min_sizes = cfg['min_sizes']
self.max_sizes = cfg['max_sizes']
self.steps = cfg['steps']
self.aspect_ratios = cfg['aspect_ratios']
self.clip = cfg['clip']
self.version = cfg['name']
for v in self.variance:
if v <= 0:
raise ValueError('Variances must be greater than 0')
def forward(self):
mean = []
for k, f in enumerate(self.feature_maps): #[38, 19, 10, 5, 3, 1],
for i, j in product(range(f), repeat=2):
f_k = self.image_size / self.steps[k]
# unit center x,y
cx = (j + 0.5) / f_k
cy = (i + 0.5) / f_k
# aspect_ratio: 1
# rel size: min_size
s_k = self.min_sizes[k]/self.image_size
mean += [cx, cy, s_k, s_k]
# aspect_ratio: 1
# rel size: sqrt(s_k * s_(k+1))
s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size))
mean += [cx, cy, s_k_prime, s_k_prime]
# rest of aspect ratios
for ar in self.aspect_ratios[k]:
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)]
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
# back to torch land
output = torch.Tensor(mean).view(-1, 4) ##[8732,4]
if self.clip:
output.clamp_(max=1, min=0)
return output
这里注意init里面初始化的一些参数就是上面voc里面的。这里主要是用到了
'feature_maps': [38, 19, 10, 5, 3, 1], 是6个feature map的大小
'steps': [8, 16, 32, 64, 100, 300], 是下采样的倍数
'min_sizes': [30, 60, 111, 162, 213, 264], 相对于300大小
'max_sizes': [60, 111, 162, 213, 264, 315],相对于300大小
'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
'clip': True,
然后我们来解析anchor是如何生成的。
上面用product生成笛卡尔坐标,遍历每个像素位置,也就是说为每个像素位置配上anchor。
关于product,https://www.cnblogs.com/yanghailin/p/14769384.html,可以看这里3.itertools.product
或者这里简单介绍一下:
product(A,B)函数,返回A和B中的元素组成的笛卡尔积的元组,
itertools.product(*iterables, repeat=1)
iterables是可迭代对象,repeat指定iterable重复几次,即:
product(A,repeat=3)等价于product(A,A,A)
import itertools
for item in itertools.product([1,2,3,4],[100,200]):
print(item)
'''
(1, 100)
(1, 200)
(2, 100)
(2, 200)
(3, 100)
(3, 200)
(4, 100)
(4, 200)
'''
for k, f in enumerate(self.feature_maps): #[38, 19, 10, 5, 3, 1],
for i, j in product(range(f), repeat=2):
cx,cy是feature map上面的每个点,然后再配上w和h。
注意anchor的四个值都是相对值,都是0-1的小数。
mean一般而言是4个,但是aspect_ratios个数是2的话,就是6个。
这里for循环多一轮,就会多出2个,所以是6个
for ar in self.aspect_ratios[k]:
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)]
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
s_k = self.min_sizes[k]/self.image_size
s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size))
[cx, cy, s_k, s_k]
[cx, cy, s_k_prime, s_k_prime]
[cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)] ##ar取2或者3
[cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
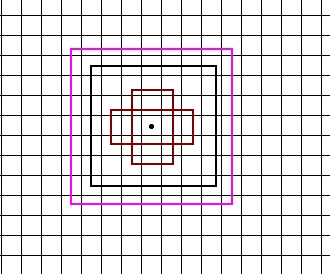
从上面计算规则来看,前面两个是正方形,一个大的一个小的正方形。
然后后面两个是矩形,一个长的矩形,一个宽的矩形。
当k=0,f=38的时候,featuremap的大小是38,ar只有一个2,所以是一个点对应4个anchor。画图如下:
然后feature map 等于38,19, 10, 5, 3, 1也是类似的,只不过
'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
19, 10, 5的时候aspect_ratios个数为2,一个点就会对应6个anchor。
所以,整个6个大循环下来,得到的anchor的总的个数为:

还有一点就是
'min_sizes': [30, 60, 111, 162, 213, 264], 相对于300大小
'max_sizes': [60, 111, 162, 213, 264, 315],相对于300大小
相对于300大小,因为看到代码里面
s_k = self.min_sizes[k]/self.image_size
都是除以的self.image_size(300)。
然后'feature_maps': [38, 19, 10, 5, 3, 1], 是6个feature map的大小
其实这里就可以看出,在feature等于38的尺寸上面,是最大的尺寸,找的最小的min_sizes是30(相对于300),所以可以看到是在浅层特征上面找小目标!
然后anchor的格式就是下面这些值。
tensor([[0.0133, 0.0133, 0.1000, 0.1000],
[0.0133, 0.0133, 0.1414, 0.1414],
[0.0133, 0.0133, 0.1414, 0.0707],
...,
[0.5000, 0.5000, 0.9612, 0.9612],
[0.5000, 0.5000, 1.2445, 0.6223],
[0.5000, 0.5000, 0.6223, 1.2445]])
最后,这里详细讲解了anchor的生成方式,其实,真的,all in code。
这里再详细不过了,要是下次再被问到,不要答不上来哦~
主要就是这4个,记住就好:
[cx, cy, s_k, s_k]
[cx, cy, s_k_prime, s_k_prime]
[cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)] ##ar取2或者3
[cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
~~~~~2021年06月11日09:42:46 更新~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
这里有一个很重要的细节!我是看到后面计算loss的时候才回过头来看的。因为后面看到truths直接与这里生成的anchor做相交运算。
overlaps = jaccard(
truths,
point_form(priors)
)
我就在想怎么能直接做交并比呢,因为truths相对于300300的比例,难道这里的anchor也是相对于300300的吗?
然后仔细看这里的代码,发现一个细节!
就是
for k, f in enumerate(self.feature_maps): #[38, 19, 10, 5, 3, 1],
for i, j in product(range(f), repeat=2):
f_k = self.image_size / self.steps[k]
# unit center x,y
cx = (j + 0.5) / f_k
cy = (i + 0.5) / f_k
# aspect_ratio: 1
# rel size: min_size
s_k = self.min_sizes[k]/self.image_size
mean += [cx, cy, s_k, s_k]
第一循环是step=8, f_k = self.image_size / self.steps[k]-->f_k = 300/8=37.5
所以可以看到cx = (j + 0.5) / f_k 和 cy = (i + 0.5) / f_k都是相对于第一层feature map大小38的。
但是看到w和h都是相对于self.image_size(300)的! s_k = self.min_sizes[k]/self.image_size。
然后整出的anchor mean += [cx, cy, s_k, s_k]可以直接和在300上面的比例直接做交并比运算。想想确实是可以的!
因为你300下采样8倍的feature map38上面,38每移动一个点在300上面相当于移动了8个点。所以,位置是相对的,映射到300上面就是乘以倍数移动。举例
j=3时候
cx=(j+0.5)/37.5=0.09333 0.09333*300=27.999
j=4时候
cx=(j+0.5)/37.5=0.12 0.12*300=36
可见,36-28=8,j变化了1,在300上面就变化了8,就是300在下采样8倍38的大小上,每移动1位就相当于在300上移动了8。
所以后面把在38大小上面的比例用在300上面,就是默认这种行为(每移动1位就相当于在300上移动了8)。但是他对应的宽和高还是按照300的比例来的。这里没有毛病。
只是位置有个倍移,宽和高还是按照300上面的比例来。
所以这里得到的anchor可以直接和groundtruth做交并比。
额外链接:
深入理解anchor https://blog.csdn.net/qianqing13579/article/details/82106664

 浙公网安备 33010602011771号
浙公网安备 33010602011771号