

DB/DBNet:Real-time Scene Text Detection with Differentiable Binarization 一些问题
深度学习ocr交流qq群:1020395892
论文地址:https://link.zhihu.com/?target=https%3A//arxiv.org/pdf/1911.08947.pdf
github:https://github.com/MhLiao/DB
捣鼓DB有一段时间了,年前就开始训练了。
问题1:不收敛,原来是我的数据标签有问题,双cuda
刚开始是训练死活不收敛,训练ic15数据集也不收敛,官方数据集ic15都不收敛??不由怀疑肯定是哪里搞错了。我的是cuda8的,pytorch1.1还是1.2的,怀疑可能是一定是需要cuda10,
于是冒着重装系统的危险捣鼓双cuda,首先升级驱动418,之前是384,cuda10需要驱动418,418也向下兼容cuda8.一顿操作倒是很顺利,/usr/local/下面是cuda-8.0 cuda-10.0 还有一个软链接,想用哪一个就修改一下软链接就可以了。
于是欢快的用anconda装pytorch-cuda10版本的。现在装的是pytorch 1.3.1 py3.7_cuda10.0.130_cudnn7.6.3_0 pytorch;之前敲装pytorch默认安装cuda10.1的pytorch版本,但是运行DB报错,报cuda的问题,弄了很久,发现我本地是10.0版本的,然后试着找cuda10.0版本的pytorch,找到,装好再运行就不报错了。
但是不收敛的问题依旧存在,不知道咋搞的。后来看源码数据处理那块,发现是会去掉最后一位,因为ic15数据标签格式是:
58,80,191,71,194,114,61,123,fusionopolis
147,21,176,21,176,36,147,36,###
去掉最后一位的文本内容,而我的数据集只有坐标,并且有4个点有14个点的。
在data->image_dataset.py line71
num_points = math.floor((len(line) - 1) / 2) * 2 ###去掉“-”就可以
还有line41
gt_path=[self.data_dir[i]+'/train_gts/'+timg.strip().replace(".jpg","")+'.txt' for timg in image_list] ##.replace(".jpg","")表示gt与img名字一样
然后训练我40多万的数据集,训练几天loss维持在1左右吧,测试也可以而且测其他的文本鲁棒性也很好。
ic15数据集不收敛的原因未知,loss一直在4左右。。。可能是数据太少导致的吧。
问题2:--polygon效果没有四个点的好 --image_short_side(需要是32的倍数)
有一个问题是这些都是4个点,也支持轮廓点的,需要加--polygon 但是加了这个效果不好,后面再看看。
CUDA_VISIBLE_DEVICES=0 python demo.py DB-master/experiments/seg_detector/merge_data_resnet50_deform_thre-SRC.yaml --visualize --resume /DB-master/myfile/model_epoch_13_minibatch_396000-20200220 --image_path /data_2/everyday/0220/snapshot13.png --polygon --box_thresh 0.35
还可以加一个参数--image_short_side,默认是736,这个参数需要是32的倍数。
效果图,这些图是不在数据集里面的其他图:
********************************示例1:
********************************示例2:
********************************示例3:
论文、源码理解:
作者的源码实在是太复杂了啊,直接看蒙圈了。各种动态类啊,动态创建啊,不好调试啊,断点不好跟踪。
源码我是看了很久吧,靠近一个月,加上春节疫情这段时间在家,效率很不高,特别是碰到看不懂的。
我现在都不明白哪个类是什么时候就创建好了的,我只是把每个文件都看的很熟了。
根据yaml动态创建类
比如文件夹concern里面有个config.py
class State:
def __init__(self, autoload=True, default=None):
self.autoload = autoload
self.default = default
class StateMeta(type):
def __new__(mcs, name, bases, attrs):
....
class Configurable(metaclass=StateMeta):
....
然后后面所有的类都是继承Configurable这个类。ヾ(。`Д´。),metaclass是叫元类的一个东东,https://www.cnblogs.com/yssjun/p/9832526.html
所有的类都是通过getattr(self, name)这个玩意动态创建,之所以要动态创建,是为了方面配置yaml可以多做实验,可以对于我们就看起来懵逼了。看yaml文件:
import:
- 'experiments/seg_detector/base_totaltext.yaml'
package: []
define:
- name: 'Experiment'
class: Experiment
structure:
class: Structure
builder:
class: Builder
model: SegDetectorModel
model_args:
backbone: deformable_resnet50
decoder: SegDetector
decoder_args:
adaptive: True
in_channels: [256, 512, 1024, 2048]
k: 50
loss_class: L1BalanceCELoss
representer:
class: SegDetectorRepresenter
max_candidates: 1000
measurer:
class: QuadMeasurer
visualizer:
class: SegDetectorVisualizer
train:
class: TrainSettings
data_loader:
class: DataLoader
...
各种类,程序运行的时候都是读取的这些来创建与初始化类的。
数据预处理
数据处理经过了7个步骤对应7个类!需要经过什么处理在base_***.ymal和base.ymal指定数据处理的类和参数,比如yaml文件中:
processes:
- class: AugmentDetectionData
augmenter_args:
- ['Fliplr', 0.5]
- {'cls': 'Affine', 'rotate': [-10, 10]}
- ['Resize', [0.5, 3.0]]
only_resize: False
keep_ratio: False
- class: RandomCropData
size: [640, 640]
max_tries: 10
- class: MakeICDARData
- class: MakeSegDetectionData
- class: MakeBorderMap
- class: NormalizeImage
- class: FilterKeys
superfluous: ['polygons', 'filename', 'shape', 'ignore_tags', 'is_training']
读源码的时候我并不知道在哪里创建与初始化了这些类,后面再看吧。我只是在data->image_dataset.py文件的def getitem(self, index, retry=0):函数打断点:
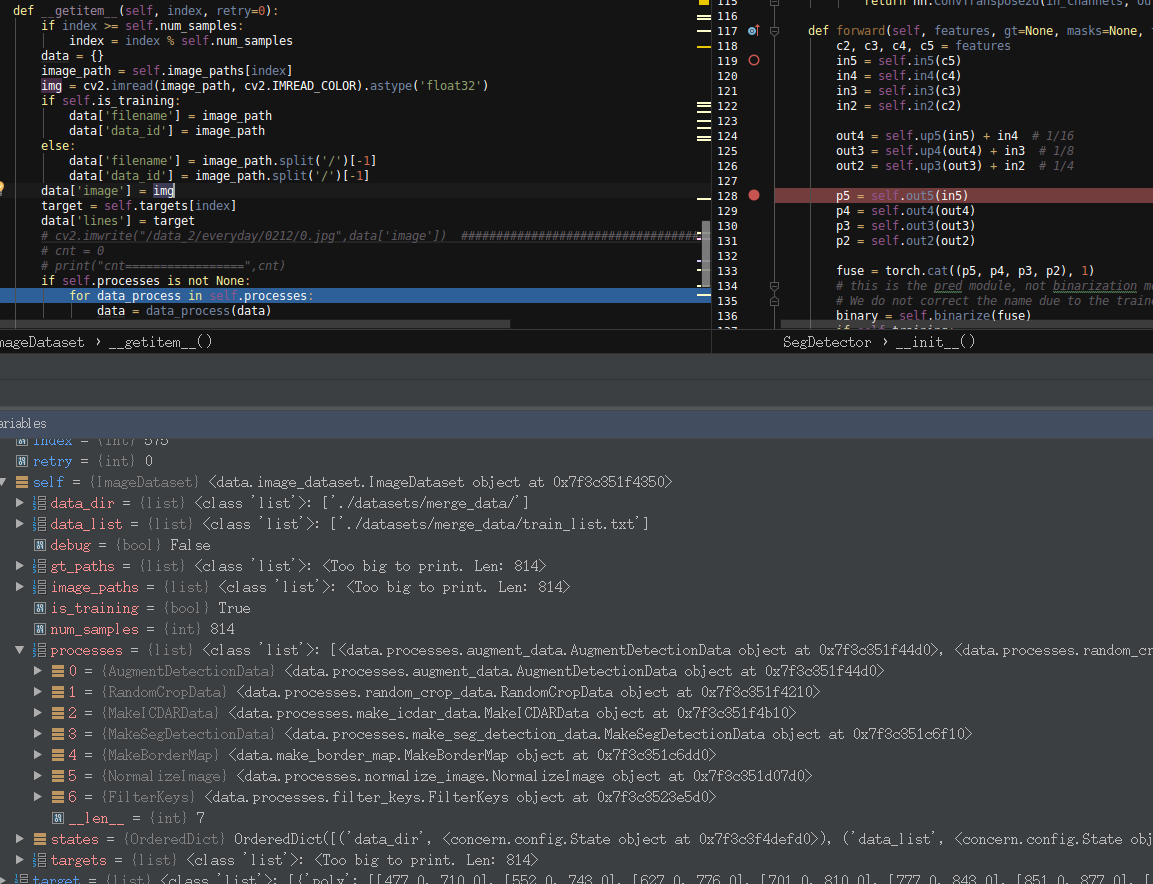
可以看到,循环在预处理,一个接这一个。想看哪个就提前去哪个类打上断点。
其中,make_border_map.py这个是为了做threshold的标签的,没有看懂,但是看效果图是高亮文字块边缘,其余部分都赋值0.3,后面再说这块东西。
data文件夹下面有一些py文件和data文件夹下面的processes文件夹下面的py貌似是一样的,实际运行的时候发现有些运行的是data下面的py有些是processes文件夹下面的,懵圈+10086
model.forward()函数执行步骤
trainer.py里面的一个函数:
def train_step(self, model, optimizer, batch, epoch, step, **kwards):
optimizer.zero_grad()
results = model.forward(batch, training=True)
....
results = model.forward(batch, training=True)后面是跑到哪里呢?
然后我看这个model怎么初始化的,该文件上面:
def init_model(self):
model = self.structure.builder.build(
self.device, self.experiment.distributed, self.experiment.local_rank)
return model
然后:
structure->Builder的build函数如下:
def build(self, device, distributed=False, local_rank: int = 0):
Model = getattr(structure.model,self.model)
model = Model(self.model_args, device,
distributed=distributed, local_rank=local_rank)
return model
---structure.model在yaml文件中指定:
model: SegDetectorModel
所以我就去找类SegDetectorModel
class SegDetectorModel(nn.Module):
def __init__(self, args, device, distributed: bool = False, local_rank: int = 0):
super(SegDetectorModel, self).__init__()
from decoders.seg_detector_loss import SegDetectorLossBuilder
self.model = BasicModel(args)
再继续:
class BasicModel(nn.Module):
def __init__(self, args):
nn.Module.__init__(self)
self.backbone = getattr(backbones, args['backbone'])(**args.get('backbone_args', {}))
self.decoder = getattr(decoders, args['decoder'])(**args.get('decoder_args', {}))
def forward(self, data, *args, **kwargs):
returbone: den self.decoder(self.backbone(data), *args, **kwargs)
上面的:在yaml文件中写了:
backbone: deformable_resnet50
decoder: SegDetector
所以return self.decoder(self.backbone(data), *args, **kwargs) 这一句就跑了两个类里面的forward()函数
总结:results = model.forward(batch, training=True)执行步骤是:
step1:
SegDetectorModel下面的forward:
if isinstance(batch, dict):
data = batch['image'].to(self.device)
else:
data = batch.to(self.device)
data = data.float()
pred = self.model(data, training=self.training)
step2:
然后调用 BasicModel的forward:
backbone就是deformable_resnet50
decoder就是SegDetector
def forward(self, data, *args, **kwargs):
return self.decoder(self.backbone(data), *args, **kwargs)
step3:resnet50的forward ##self.backbone(data) == resnet50
step4:SegDetector的forward ##self.decoder == SegDetector
我就是先在一个类中打断点,然后我感觉接下来是跑到这个类的forward函数,就在这打断点,这样是可以的,我就是这么摸索出来的。
网络的流程
所以摸索出网络的大概:
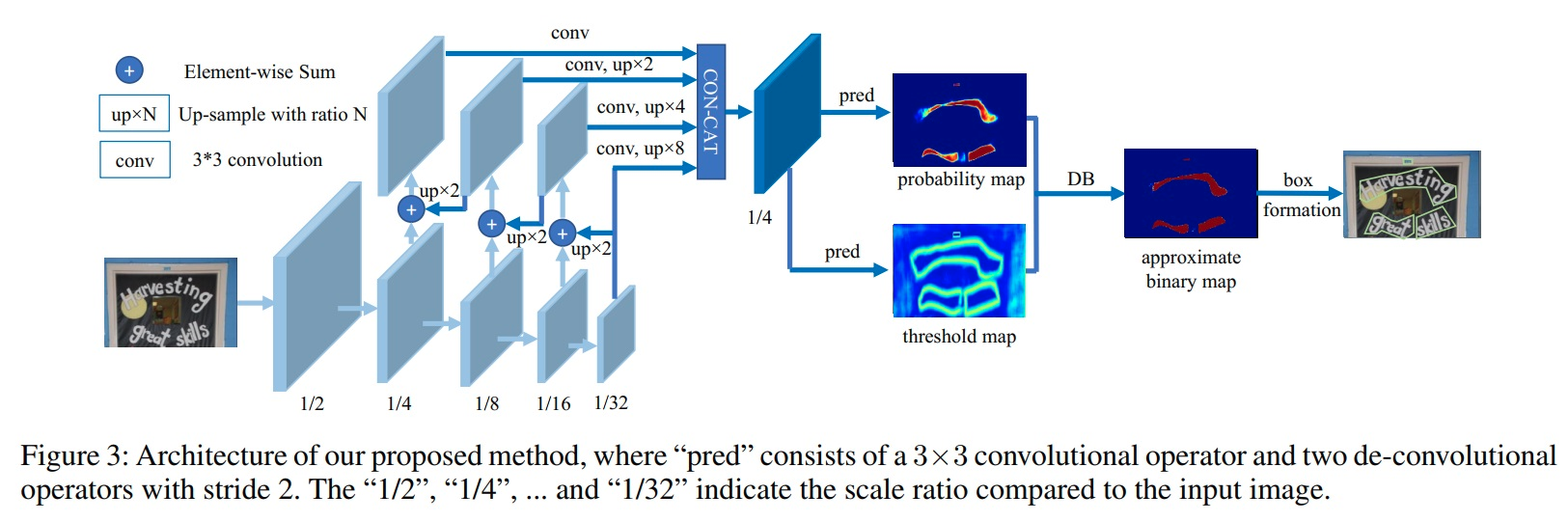
先是通过resnet+可变形卷积得到feature_map X2,X3,X4,X5 (注意resnet中嵌套了可变形卷积---可以参考https://www.cnblogs.com/yanghailin/p/12321832.html)
然后送到SegDetector的forward数概率图函数,一顿卷积-池化-上采样-bn-relu,累加合并
c2, c3, c4, c5 = features
in5 = self.in5(c5)
in4 = self.in4(c4)
in3 = self.in3(c3)
in2 = self.in2(c2)
out4 = self.up5(in5) + in4 # 1/16
out3 = self.up4(out4) + in3 # 1/8
out2 = self.up3(out3) + in2 # 1/4
p5 = self.out5(in5)
p4 = self.out4(out4)
p3 = self.out3(out3)
p2 = self.out2(out2)
fuse = torch.cat((p5, p4, p3, p2), 1)
p5,p4,p3,p2的尺寸都是[n,64,160,160],fuse的尺寸是[n,256,160,160];再然后:
binary = self.binarize(fuse)
thresh = self.thresh(fuse)
再一顿卷积、bn、relu、反卷积、sigmoid操作得到binary,其尺寸是[n,1,640,640]和输入尺寸一样
再一顿卷积、bn、relu、上采样、sigmoid操作得到thresh,其尺寸是[n,1,640,640]和输入尺寸一样
再计算:

thresh_binary = torch.reciprocal(1 + torch.exp(-self.k * (binary - thresh))) 论文中的那个公式(如上公式)
binary是学到的分数概率图
thresh是学到的文字块边界图
thresh_binary是由binary和thresh根据公式计算出来的
后面就是loss约束,L1BalanceCELoss
def forward(self, pred, batch):
bce_loss = self.bce_loss(pred['binary'], batch['gt'], batch['mask'])
metrics = dict(bce_loss=bce_loss)
if 'thresh' in pred:
l1_loss, l1_metric = self.l1_loss(pred['thresh'], batch['thresh_map'], batch['thresh_mask'])
dice_loss = self.dice_loss(pred['thresh_binary'], batch['gt'], batch['mask'])
metrics['thresh_loss'] = dice_loss
loss = dice_los数概率图s + self.l1_scale * l1_loss + bce_loss * self.bce_scale
metrics.update(**l1_metric)
else:
loss = bce_loss
return loss, metrics
可以看到:
binary与thresh_binary的标签都是用的gt
thresh的标签用的thresh_map
自适应阈值
这个问题困扰我很久,单看这个公式:

p可以理解,就是有文字的区域有值,0.9以上,没有文字区域黑的,为0
T呢,T是一个只有文字边界才有值的,其他地方为0,那所有的像素都是经过这个公式,得到thresh_binary,这个合适吗?
然后自己慢慢从一开始制作的标签入手,gt就是我们标注好的,p就是gt,那个T的标签threshold map是根据文字边界做的,T的标签threshold map到底是啥,
threshold map是将文本框分别向内向外收缩和扩张d(根据第一步收缩时计算得到)个像素,然后计算收缩框和扩张框之间差集部分里每个像素点到原始图像边界的归一化距离。是根据一个算法跑出来的,看了源码就是一堆计算,没有细看。然后我就把gt与threshold map显示出来更加直观。
其实一开始就有个问题,gt是标注好的,为啥还要经过psenet里面的缩水操作?
看到图自然就会明白了,这就是这个算法的特别之处了。
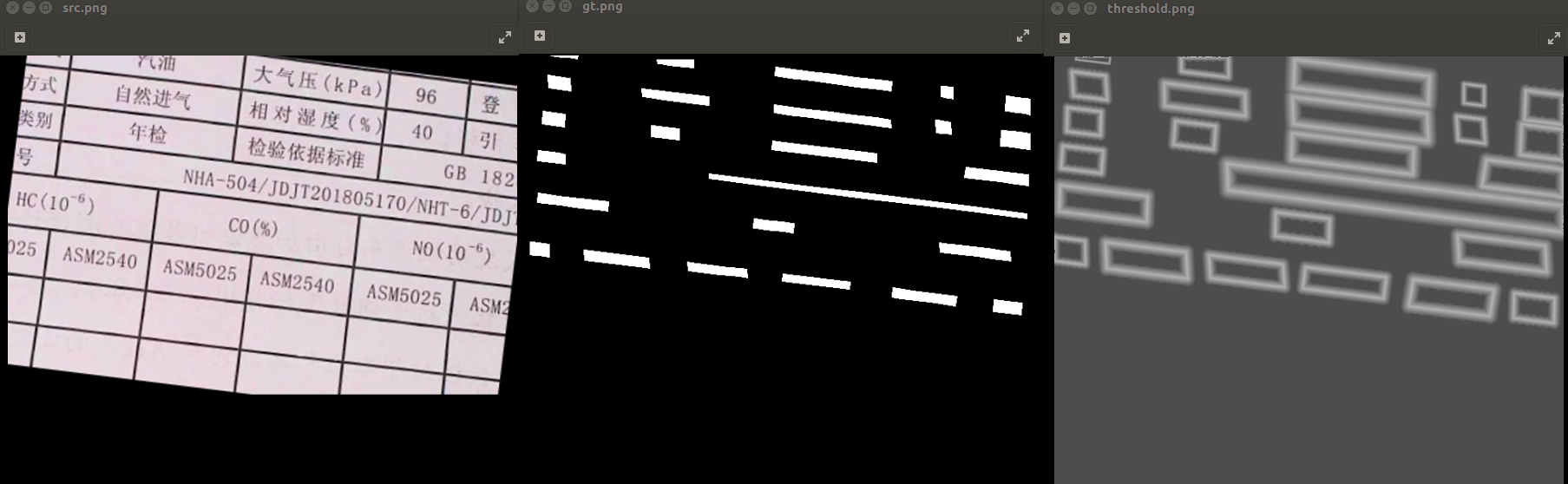
分别是原图,gt图,threshold map图。
这里再说下threshold map图,非文字边界处都是灰色的,这是因为统一加了0.3,所有最小值是0.3,这是为了后面有用的。
这里其实还看不清,我们把src+gt+threshold map看看。

可以看到:
p的ground truth是标注缩水之后
T的ground truth是文字块边缘分别向内向外收缩和扩张
p与T是公式里面的那两个变量。
再看这个公式与曲线图:
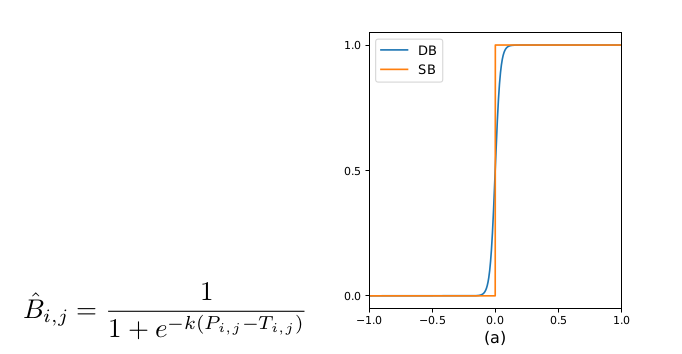
P和T我们就用ground truth带入来理解:

p网络学的文字块内部,
T网络学的文字边缘,两者计算得到B。
B的ground truth也是标注缩水之后,和p用的同一个。
在实际操作中,作者把除了文字块边缘的区域置为0.3.应该就是为了当在非文字区域,
P=0,T=0.3,x=p-T<0这样拉到负半轴更有利于区分。可以看上面的曲线图。
同时,作者在论文中也写了之所以这么做的原因:
首先:
Threshold map本身可以在没有监督的情况下学到。通过可视化的观察,发现threshold map会highlight文字区域的边缘。因此作者利用文字区域的标注对threshold进行监督以获得更好的结果。如下论文中的图:
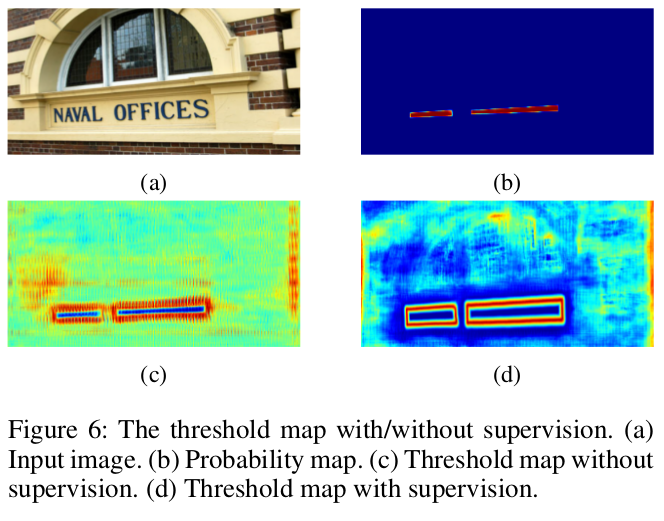
c图是没有监督的效果,d是有监督的
其次:求导,更容易区分正负样本
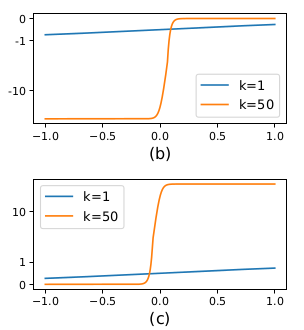
(b) Derivative of l+ . (c) Derivative of l− .
x=p-T,我们上面讨论的
x>0是缩水之后的文字块内部
x<0是缩水之后的文字块外部
正负样本的导数在x>0与x<0处有较大的区别,k=1时区别不大,当k=50时,可以看到放大了这种区别。
作者论文中说可微分二值化的好处:
The differentiable binarization with adaptive thresholds can not only help differentiate text regions
from the background, but also separate text instances which are closely jointed.
暂时想到的就是这些了,后面的有想法再补充,欢迎一起讨论。
小弟不才,同时谢谢友情赞助!


 浙公网安备 33010602011771号
浙公网安备 33010602011771号