摘要:原文地址: http://www.cn-witmed.com/list/34/9555.html 模型微调的基本思想是使用少量带标签的数据对预训练模型进行再次训练,以适应特定任务。在这个过程中,模型的参数会根据新的数据分布进行调整。这种方法的好外在于,它利用了预训练模型的强大能力,同时还能够适应新的
阅读全文
摘要:相关: https://www.bilibili.com/video/BV1gD4y1h7tj/
阅读全文
摘要:一直在学习强化学习算法,但是一直也没有真实的机器人环境可以操作,因此只是停留于纸面意义的理论学习,但是突然看到这么一个说法: 来自: https://weibo.com/1255595687/O5k4Aj8l2 Real2Sim2Real闭环,从Real2Sim到Sim2Real,打通数据到数据的自
阅读全文
摘要:相关: https://weibo.com/1255595687/O5k4Aj8l2 该公司对其产品的强化学习训练算法给出了较少的描述: 提出迭代式预训练(Iterative Pre-training)方法,把通用机器人的基础运动能力划分为不同级别,进行循序渐进的预训练,这个过程让训练的结果更可控,
阅读全文
摘要:原文: https://weibo.com/1255595687/O5k4Aj8l2 【逐际动力双足机器人P1在深圳塘朗山零样本、无保护、全开放完成测试】 上周,就在全球AI界被美国初创公司Figure联合OpenAI发布的首款人形机器人Figure 01相关视频而震撼的时候,中国深圳的“逐际动力双
阅读全文
摘要:相关: https://www.bilibili.com/video/BV1kK421a7sP/ 该机器人目前实现的功能有:引导盲人行走、引导盲人过马路、引导盲人乘电梯、与盲人进行语音交互并能识别语音命令。 一个小问题,该产品什么时候可以实现引导盲人爬山、走坡路、上公交车、搭地铁,等等操作呢? 还有
阅读全文
摘要:相关: https://www.youtube.com/watch?v=f0q8tfZ89Qo 小米公司一直没有加入到制造电动车的行列中,直到几年前才感觉造车是必须要走的路了,但是造车就一定是要造电动车,毕竟是新势力嘛,而电动车除了电池、电机和基本的车辆构造外最为重要的就是自动驾驶技术,为了给自家未
阅读全文
摘要:网上看视频中突然想到的一个应用场景,未来的实现视觉和语言大模型的四足机器狗是否可以替代导盲犬呢? 要知道在我国只有一个导盲犬的训练基地,那就是辽宁大连的导盲犬训练基地,这也就意味着全中国的盲人想要配置一个导盲犬就必须在大连的导盲犬基地排队,因此往往导致很多有需求的盲人都要排很久的时间,同时由于导盲犬
阅读全文
摘要:相关: https://www.youtube.com/watch?v=9RhYstkUeaw
阅读全文
摘要:相关: https://www.leiphone.com/category/robot/Hgy9i8azqGncESIB.html Nova Cater AMR是一款仓储运货机器人,可以应用在仓储物流上,也可以应用在酒店运送菜品上;该机器人使用和NVIDIA公司联合开发的自动驾驶系统,这也是NVID
阅读全文
摘要:相关: https://www.leiphone.com/category/robot/cJo6GYgVkx8iQ9T7.html 开源的 Humanoid-Gym 框架,主要实现的技术有: 通过精心设计的奖励函数; 域随机化技术; 该开源项目实现 sim-to-real 的功能,实现了强化学习训练
阅读全文
摘要:地址: https://www.bilibili.com/video/BV1ys4y1z7nS/ 无意间看到了些比较靠谱的解释: (来自地址:https://www.bilibili.com/video/BV1ys4y1z7nS/) 看了网上网友的解释,估计这东西应该和NVIDIA的显卡一样都需要安
阅读全文
摘要:本文来自博客园,作者:叶伟民,转载请注明原文链接:https://www.cnblogs.com/adalovelacer/p/18092208/pdf-tools-for-large-language-model 去年(2023年)是大模型爆发元年。但是大模型具有两个缺点:缺失私有领域知识和幻觉。
阅读全文
摘要:相关: https://baijiahao.baidu.com/s?id=1792281493472406727&wfr=spider&for=pc L0,就是完全没有自动驾驶技术的车,可以理解为所有的非电动车均为L0,也就是说传统汽车没有使用自动驾驶技术的都是L0。 L1,增加了一点的辅助功能,如
阅读全文
摘要:参考原文: https://www.sohu.com/a/589454391_383324?scm=9010.8000.0.0.1265 可以利用动作捕捉“学习”人类动作,依靠视觉的AI算法和学习,机器人能知道手在空间的位置,并准确拿取物品。 Optimus擎天柱感知世界的方式和人类一样,都是视觉。
阅读全文
摘要:原地址: https://blog.csdn.net/m0_37874102/article/details/114365837 总结一些之前看过的SLAM(VO,VIO,建图)文献所发表的实验室和作者 实验室 美国卡耐基梅陇大学机器人研究所 研究所主页:https://www.ri.cmu.edu
阅读全文
摘要:参考: https://hippo-robot.com/company/440/ 瑞士苏黎世联邦理工学院 产品:
阅读全文
摘要:一个问题,那就是足式机器人的步态控制是否可以完全不借助传感器信息? 传感器信息是指摄像头、激光雷达或接触式传感器信息,如果机器人不借助这些信息则只依靠本体的传感器信息(速度传感器、方向传感器、力矩传感器)那么是否可以实现足式机器人的步态控制呢。 在传统的仿真环境下我们一般都是采用本体传感器信息进行控
阅读全文
摘要:Learnging Where To Look End-to-End
阅读全文
摘要:地址: https://www.youtube.com/watch?v=ikrDqfnZNLU Clone 公司: 生产通过液压驱动的仿生机器人。
阅读全文
摘要:相关: https://cyberbotics.com/doc/guide/tutorials 下载地址: https://github.com/cyberbotics/webots/releases/tag/R2023b
阅读全文
摘要:IsaacManipulator 为机械臂提供了卓越的灵活性和模块化AI功能,并提供了一系列强大的基础模型和GPU加速库。它提供了高达80倍的路径规划加速,零样本感知提高了效率和吞吐量,使开发者能够实现更多新的机器人任务的自动化。早期生态系统合作伙伴包括安川电机、泰瑞达旗下子公司优傲、PickNik
阅读全文
摘要:特斯拉的老马,搞的optimus人形机器人就是通过人来训练机器人(真人实际演示动作),但是未来使用仿真环境自动生成数据是否可行呢,NVIDIA的老黄在2024 GTC上是大力推出自家的GROOT平台,该平台的主要数据则是使用仿真器生成的,到底哪种方式更优呢?
阅读全文
摘要:地址: https://www.youtube.com/watch?v=yU3GUHDf0mk
阅读全文
摘要:参考: https://blog.csdn.net/qq_51963216/article/details/125754175 https://zhuanlan.zhihu.com/p/59560621 下图及文字来自(遵循 CC 4.0 BY-SA 版权协议): https://blog.csdn
阅读全文
摘要:人形机器人的技术,包括软件、硬件、AI三个方向,硬件则包括电机的制作,等等;软件方面则可以包括机器人外形的设计、VR/AR技术实现的仿真环境、计算机视觉、机器人学/导航和环境感知,等等;AI则包括计算机视觉、大语言模型、多模态模型、强化学习模型。 硬件嘛,机器人的外形和电机是非专业搞机械和电机设计的
阅读全文
摘要:地址: https://www.creaform3d.com.cn/zh/ji-liang-jie-jue-fang/vxscan-rshu-zi-luan-sheng-huan-jing-ruan-jian-mo-kuai VXscan-R Plan 不仅仅是一个机器人编程软件,它还是一个完整的项
阅读全文
摘要:资料: https://www.youtube.com/watch?v=3CdwPGC9nyk 答案很简单,那就是这个公司单独找了一个外观设计团队,单独设计的外观。 看来啥事情要想搞的好,那就得多花钱。
阅读全文
摘要:官方地址: https://www.lejurobot.com/talos-cn/ 淘宝: https://lejuznsb.tmall.com/shop/view_shop.htm?spm=pc_detail.27183998/evo365560b447259.202202.1.28477dd6P
阅读全文
摘要:比较好奇,NVIDIA今年推出的终端芯片Jetson Thor到底是个啥样,毕竟这东西在机器人元年的2024年开始预热宣传,2025年大规模部署,注定是AI领域的一个重要角色。 看完GTC 2024的宣传,看看这个产品真正开始面市销售时长啥样吧,估计2024年下半年应该就可以上线销售了。
阅读全文
摘要:本文的title看上去像是在发牢骚,实际却是讨论一个现实的问题,那就是未来人工智能在科研院所开展的可行性的分析。 因为自己曾在东北某海边985读博士,最后虽然是结业没有学位,但是这些年的工作和时间花销却是实实在在的,因此对这个问题还是有些话说的。 本文所提的三个方向被认为是未来人工智能的核心,但是这
阅读全文
摘要:地址: https://www.youtube.com/watch?v=ER4xNhSVJ2c 强化学习,已经不是什么稀奇的概念了,强化学习算法是大语言模型、自动驾驶、人形机器人的核心算法,但是现有的强化学习往往都是针对特定场景的,如果面对新的场景就需要重新的训练,而这是难以满足人类对通用人工智能的
阅读全文
摘要:人形机器人从人类演示(demenstration)数据中学习的几种方式 使用仿真环境,在仿真环境中生成近似人类的行为数据,然后利用仿真生成的数据训练机器人。 该种方式最为传统,也最为易行,但是由于仿真环境下生成的数据(模拟仿真下训练的强化学习算法)与真实环境有一定差距,因此往往效果不是十分理想,该种
阅读全文
摘要:地址: https://www.bilibili.com/video/BV1A2421P7pH/ 视频用到的工具voxcraft体验地址:https://voxcraft.ai/
阅读全文
摘要:最近在用nvidia omniverse时突然发现这样的一个问题,那就是这个软件实在是太太了,一个组件就4个多GB大小,如果安装几个组件后那么几十GB的硬盘就没有了,同时由于这个体积太大,因此再启动和使用的时候需要从硬盘上导入文件,这个过程是十分的痛苦的,由于我用的是机械硬盘,这个速度简直是惨不忍睹
阅读全文
摘要:相关: https://www.nvidia.com/en-us/on-demand/session/omniverse2020-om1573/ https://www.nvidia.com/zh-tw/on-demand/session/omniverse2020-om1574/ https://
阅读全文
摘要:相关: https://www.bilibili.com/video/BV1fN4y1z7uD/?vd_source=f1d0f27367a99104c397918f0cf362b7 接触式:就是使用探针传感器直接也物体接触进行测量。 (非接触式)主动式:飞行时间法,指的是使用主动发射激光、红外线、
阅读全文
摘要:相关: https://baijiahao.baidu.com/s?id=1566933142821989&wfr=spider&for=pc https://baijiahao.baidu.com/s?id=1767407978821181433&wfr=spider&for=pc Nvidia的
阅读全文
摘要:地址: https://www.youtube.com/watch?v=JQdyzQdMRS0 Fusing Real-Time AI With Digital Twins 使用NVIDIA的3D仿真环境,为真实的工厂运行情况建立数字仿真环境,即数字孪生,然后使用NVIDIA的AI套件对建立的仿真环
阅读全文
摘要:上了中央电视台的“苏州健雄职业技术学院” 加强我国的职业技术教育是一项重要的国家政策,为我国的工业制造培养坚实的人才基础。
阅读全文
摘要:关于台湾省独立的这一个想法,据我所知最初出现在国共战争的后期,当时陈诚在东北的辽沈战场上打败后作为蒋介石的嫡系被派到台湾省任职第一领导,其目的就是为战败后撤退到台湾省做准备和铺垫,而当时的国民党高级领导中的一部分(不小的一部分)认为败退到台湾后应该不仅是划海而治,更应该的就是放弃金马澎湖等岛屿,直接
阅读全文
摘要:为啥把胡萝卜炒黄豆这道菜起个名叫“兔子乐”,其主要原因是这个菜的所有主要组成都是兔子最喜欢的,于是吃着吃着突然一想,嘿,叫这个名挺好——“兔子乐”。
阅读全文
摘要:地址: https://www.youtube.com/watch?v=eT8pceKhcaA
阅读全文
摘要:最近看到逐际动力公司推出的一款轮足混合式机器人,感觉比较新奇。轮足机器人理论上虽然在全地形场景下有更好的性能表现,但是往往由于其物理结构问题难以解决导致其落地时性能十分鸡肋,虽然有着轮式机器人在平地上上的快速移动能力,但是在负载能力和续航能力上都难以和纯足式机器人相比,而在越野地形时由于没有完整的脚
阅读全文
摘要:地址: https://36kr.com/video/2083741912486274
阅读全文
摘要:地址: https://www.heishenhua.com/
阅读全文
摘要:论文地址: https://arxiv.org/abs/1706.03762
阅读全文
摘要:相关: https://capital.lenovo.com/news/detail/id/924/s/1.html 常见的人形机器人都是测试其手臂灵活度为主,但是近日看到一款以全地形步态行走为主的机器人(逐际动力,CL-1)。虽然很少有用双足机器人测试全地形行走能力的,但是全地形行走的能力测试在四
阅读全文
摘要:智能机器人与传统机器人的区别在于是否具有智能决策模块,直白的说就是在于是否使用强化学习算法进行动作的智能决策。 但是,并不是使用强化学习算法的机器人就是智能机器人,尤其是人形机器人。强化学习算法是需要对环境进行感知的,这其实还可以分为两类,第一类是比较理想下的设定,就是指机器人的强化学习算法只感知自
阅读全文
摘要:正如NVIDIA的老黄在2024年的技术大会上的展示一样,NVIDIA公司或许最准确的定义应该是计算机图形学公司,因为不论是NVIDIA搞GPU还是搞通用计算还是搞软件生态以至于现在搞AI搞机器人搞自动驾驶,其所有业务都是围绕图形图像学这条线来展开的。 元宇宙,已经烂大街的一个概念,但是被业界认为最
阅读全文
摘要: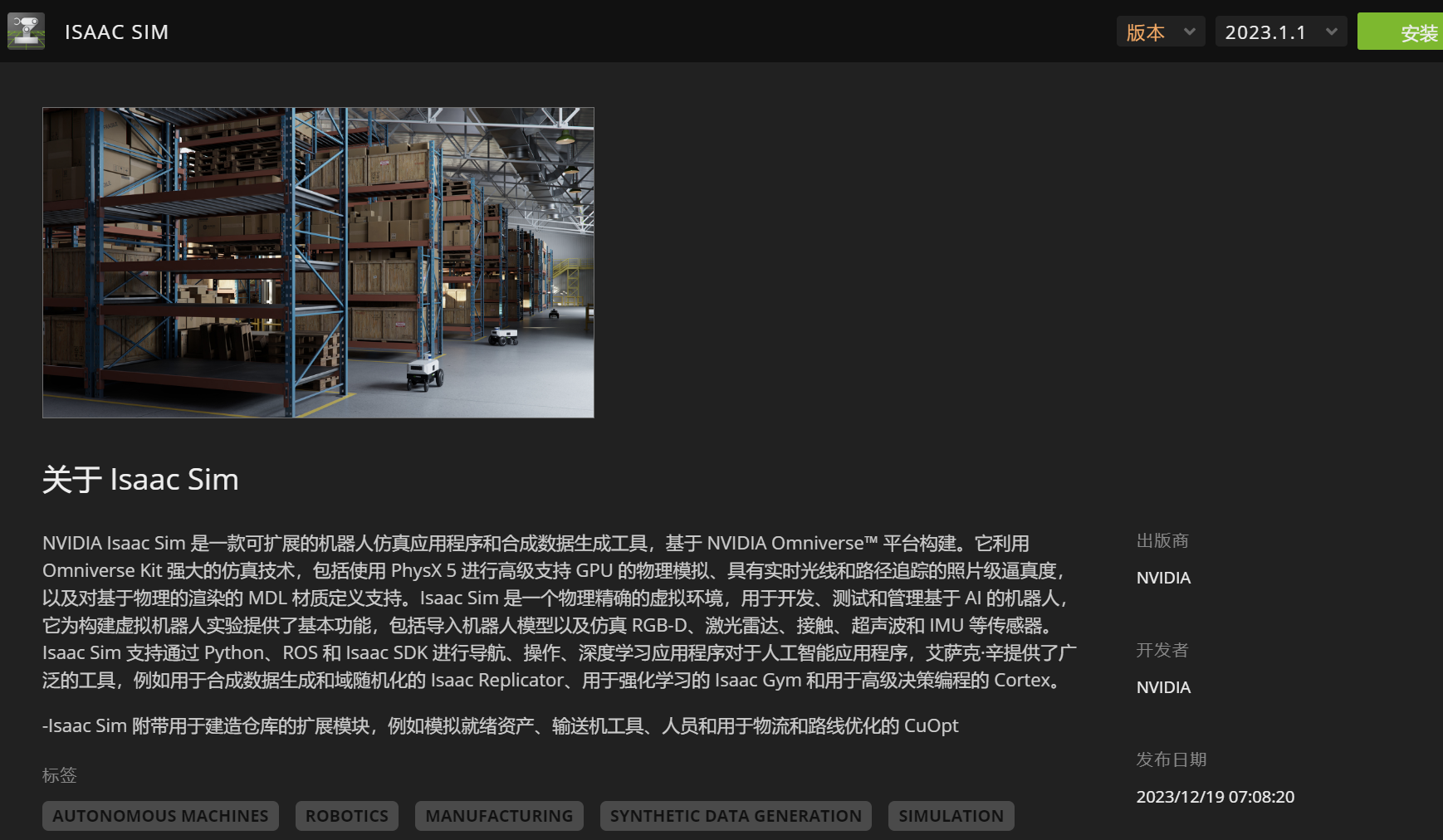
阅读全文
摘要:相关: https://www.zhihu.com/zvideo/1548363713740226561 建议参看: https://www.aiwht.com/sites/3406.html https://baijiahao.baidu.com/s?id=1740770550462318916
阅读全文
摘要:下载 NVIDIA Omniverse 并运行安装程序 - 安装后,打开 Omniverse Launcher - 在“Apps”(应用)部分中找到 Omniverse Audio2Face,然后依次单击“Install”(安装)和“Launch”(启动)。 地址: https://www.nvid
阅读全文
摘要:研教楼 6楼:611/612 房间 白振民 老师 工作电话: 0411——84707812
阅读全文
摘要:相关: https://www.unrealengine.com/zh-CN/uses/simulation https://www.epicgames.com/site/zh-CN/careers/jobs?lang=zh-CN 3D游戏引擎是人工智能的“新基建、关键基础设施”,这个概念或许很多人
阅读全文
摘要:分享一个ROS入门视频: https://www.bilibili.com/video/BV1BP4y1o7pw/
阅读全文
摘要:特斯拉的马斯克说过,人形机器人就是没有汽车轮子的自动驾驶,这句话虽然听着有些搞笑,但是从技术层面上来说这句话也确实没有什么大的问题的,甚至可以说挺准确的,这里不得不说马斯克作为技术出身的创业者虽然成了企业家和富豪但是其对技术的理解和未来技术走向的嗅觉依旧是极为强悍的。 不论智能机器人还是自动驾驶,都
阅读全文
摘要:机器人不是一个新词汇,机器人在人们生产生活中已经出现了几十年了,而最近最火的词汇是“智能机器人”或者是“人形机器人(humanoid)”,而这二者之间的区别就是是否加入了智能模块(智能感知模块和智能决策模块)。 但是不论是传统的机器人还是现在的智能机器人都是需要运行在操作系统上的,这就和我们的电脑、
阅读全文
摘要:可以说,2024年是人形机器人的元年。我国在去年年底将发展智能机器人立为了第一线的重要科技发展方向,并计划在2024年、2025年建立出完整的产业链条,并培育出几家成熟的行业领先的智能机器人公司。而我们把目标从国内移向国外,我们可以看到国外也是同样将这个发展方向定位了首要发展方向之一,不论是NVID
阅读全文
摘要:相关: https://www.ithome.com/0/756/603.htm https://baijiahao.baidu.com/s?id=1774732295233220838 https://www.nvidia.cn/geforce/news/nvidia-ace-gdc-gtc-20
阅读全文
摘要:相关: https://www.youtube.com/watch?v=bMIRhOXAjYk 参考: https://www.thepaper.cn/newsDetail_forward_26730622 GR00T 脱胎于英伟达的 Isaac 机器人平台工具,基于新的通用基础模型,GR00T 驱
阅读全文
摘要:官宣视频: https://www.youtube.com/watch?v=bMIRhOXAjYk 相关: https://baijiahao.baidu.com/s?id=1793921686210377001 https://www.thepaper.cn/newsDetail_forward_
阅读全文
摘要:Grok官网: https://grok.x.ai/
阅读全文
摘要:当前世界上参数最大的开源大语言模型Grok-1,参数权重大小为296GB,即3140亿参数,远远超过了OpenAI的GPT-3.5模型。 该模型采用的3140亿参数的MoE模型,在给定token上的激活权重达到了25% 。
阅读全文
摘要:参考: https://www.youtube.com/watch?v=dLELvoFt_iA
阅读全文
摘要:终结者T800全身像墨生青铜雕像摆件工艺品艺术品铸铜收藏品铜手办 网店地址: https://item.taobao.com/item.htm?id=745037184577&skuId=5234347429545&spm=a21m98.27004841
阅读全文
摘要:参考: https://www.youtube.com/watch?v=jbQ4M4SNb2M 机器人数据收集操控员,就和大模型训练数据收集员、数据类型标识员(打标签人员)一样,都是为了人工生成AI训练数据而存在的人工参与人员。 仿真环境。
阅读全文
摘要:硬件测试的方法: 硬件的稳定性、鲁棒性。为机器人设定好固有的执行策略,然后长时间的让机器人重复执行这些既定好的动作。该种测试方法主要测试硬件的设计是否合理,硬件在长时间的运行中是否可以稳定运行而不是出现问题。这种测试方法有些像测试手机是否抗摔一样,检测方法就是把手机从一定高度进行自由落体,重复100
阅读全文
摘要:深度之眼--科研助理面试题 请将答案写在每道题的后面,Word文档命名为自己的名字,通过邮件/微信回复提交。 一、选择题 1.如何安装pytorch?( A ) A 使用pip B 使用apt-get C 下载源代码变异 D 无法安装 2.pytorch中张量的阶数表示什么?( C ) A 张量的大
阅读全文
摘要:前文: https://www.cnblogs.com/devilmaycry812839668/p/18079439 前文中已经说了,对于能力强大的机器人公司来说,软件和AI技术并不是难点,真正的难点在于硬件的设计和开发,在此基础上本文讨论智能机器人和自动驾驶技术在技术领域上的区别/相关性。 在硬
阅读全文
摘要:参考: https://www.youtube.com/watch?v=NOljjZP75Gg 很多AI方向的人认为这些世界顶级的机器人公司一定是把大量的时间和精力放在了AI技术研发上了,其实不然,AI技术在实体产业上的使用其实并没有想象中的那么大的距离,甚至可以把这个理解为work就OK,尤其机器
阅读全文
摘要:产品主页: https://www.brainco.cn/#/product/brain-robotics 国内销售的一款产品,美国华人生产的,灵巧度非常高的一款仿生手产品。
阅读全文
摘要:相关资料: https://www.bilibili.com/video/BV1iG411g7B4/ https://www.youtube.com/watch?v=8cJV08MTwA0 官网主页: https://www.worldrobotconference.com/ 百度百科: https
阅读全文
摘要:问题: 应该先发展双足机器人还是四足机器人? 机器人的终极形态是humanoid,也就是人形机器人,即双足机器人,但是双足机器人的入门阶段是四足机器人。 双足机器人和四足机器人的不同点: 步态的平衡问题,最为直观的是一个是双足,另一个是四足;双足机器人往往有仿人的躯干,因此在控制时需要更高维度的自由
阅读全文
摘要:motivation: 人形机器人的实体比较昂贵,但是实验过程中机器人的摔倒和撞击时十分常见的事情,这就会导致机器人的元器件被损坏,造成较大的经济损失,为此我们在设计机器人的机械结构和电子元器件布局时就需要考虑到机器人实际运行过程中会频繁出现的摔倒和撞击问题,为此就需要提前做人形机器人(humano
阅读全文
摘要:前文: 人形机器人 —— Figure 01机器人亮相 | OpenAI多模态能力加持 | 与人类流畅对话交互 | 具身智能的GPT-4时刻 所需的AI技术: 人形机器人的软件层面其实有: 视觉模块/导航模块; 语言模块; 决策模块; 视觉模块,可以有3D点云(计算机视觉)、NeRF(Neural
阅读全文
摘要:视频地址: https://www.youtube.com/watch?v=vO1wnHA0tZg Figure AI 公司主页: https://www.figure.ai/ 根据Figure 01机器人的工作示意图可以得到下面的流程示意图: 人形机器人可以分为软件和硬件两部分,硬件部分包括电子控
阅读全文
摘要:英文原文: https://towardsdatascience.com/robotic-control-with-graph-networks-f1b8d22b8c86 强化学习算法是不是另一种形式的AI4Science? 强化学习是一种时序决策算法,比较经典的应用场景就是机器人控制,但是实际上机
阅读全文
摘要:注意,本文的解释采用Google大模型(Gemini)的答案。 翻译: 推理是运用逻辑和证据得出结论的过程。它包含批判性地思考一个主题,考虑不同的观点,以及识别事物之间的关系。以下是推理的一些方式: 逻辑推理:这涉及使用形式逻辑规则,从一系列前提中得出结论。例如,如果所有猫都是哺乳动物,所有哺乳动物
阅读全文
摘要:网友提问: 相关: https://www.cnblogs.com/devilmaycry812839668/p/10525727.html
阅读全文
摘要:论文地址: https://arxiv.org/pdf/1503.02531.pdf 在蒸馏网络中会遇到手动调整bias的说法,但是这个bias在论文中又没有明细说明是怎么个bias,具体论文出处: If this bias is increased by 3.5 查询Gemini,得到回答: As
阅读全文
摘要:前几日在某东上购入神州笔记本(HASEE),用着本来还好,但是最近只要用到电源模式的问题,这个笔记本就是会无端进入到自动关机的状态。 前文中也讨论过类似的问题: 神州笔记本 win11 节能模式 供电不足 自动关机 不过这次又有了新的问题,那就是在操作系统的电源模式下设置”闲置进入睡眠“后,当电脑从
阅读全文
摘要:论文地址: https://arxiv.org/pdf/1503.02531.pdf 蒸馏网络的重要公式: 其中,\(p^g\)为Teacher网络,\(q\)为Student网络。 个体神经网络(CNN模型): CNN层 + 全连接层(输出的是logits) + softmax层(输出的是预测值概
阅读全文
摘要:前言: 你是支持娃哈哈还是农夫山泉? 对于这样一个虚假顶着“民族企业”头衔的买办企业,我没什么好说的。之前没有注意“东方树叶”上居然全是日本元素,简直是媚日卖国,想想自己不知所以的喝了这么多年的“东方树叶”简直是恼火,我认为公众应该向农夫山泉追责,因为我们受到了欺骗,如果我之前就知道农夫山泉大比例的
阅读全文
摘要:部分内容引自:(https://www.zhihu.com/question/647069478/answer/3421652850 作者:Jade) 钟睒睒本人是农夫山泉的最大持股人,持股比例高达84%。他的儿子钟墅子,是美国籍,加入美国国籍的宣誓词大家都知道,原来我们买农夫山泉的钱可能会给美国递
阅读全文
摘要:如何理解计算机类论文、机器学习论文、人工智能AI论文中的“soft”和“hard”呢? 最近在看论文中总看到带有“soft”和“hard”的专业术语(terminology),一般二者都是作为对比进行出现的,那么问题就是在英文的计算机类论文的表达中这个“soft”和“hard”的区别点是什么? 其实
阅读全文
摘要:刚刚买了一个神州笔记本没几天,用着用着就出现问题了。 本人使用电脑有个极为不好的习惯,那就是会一次性打开特别多的应用,然后不关,一直留着,这个习惯虽然不好但也是一直没有啥问题的,不过最近换了个新的笔记本就出现了问题。 神州笔记本开启省电模式: 之所以开这个模式其实并不是为了所谓的“碳排放”来省电,其
阅读全文
摘要:参考: https://arxiv.org/pdf/1603.05691.pdf 本文要讨论的是如何构建“集成神经网络”(“Ensemble neural network”),其实“集成神经网络”其本质就是一种“集成学习”的模型,只不过个体学习器不再是传统的机器学习模型而是神经网络模型,不过一般情况
阅读全文
摘要:新买了一个笔记本,神州笔记本(HASEE),随机所带的手册,为防止丢失故把内容记录下来。 开机时按:CTRL + H 进入还原界面,点击“系统还原”,点击“恢复出厂备份”,确认。 重启电脑后在“通用”方框内打钩,确认后再次重启。 如何 卸载/关闭 该还原功能: 开机按Ctrl+H,进入还原界面->高
阅读全文
摘要:功能键功能: FN+f1 启动/关闭 触摸板 FN+f2 启动/关闭 屏幕背光 FN+f3 启动/关闭 喇叭和外接耳机 FN+f5 减低音量 FN+f6 提高音量 FN+f7 切换屏幕 FN+f8 降低屏幕亮度 FN+f9 增加屏幕亮度 FN+f10 启动/关闭 摄像头 FN+f11 启动/关闭 飞
阅读全文
摘要:视频地址: https://quanmin.baidu.com/v/7250265959743227122
阅读全文
摘要:问题: 强化学习中的“sample efficiency”应该如何翻译 —— “样本效率”还是“采样效率” 答案: 具体看上下文内容。如果是在并行强化学习的论文中出现,那么“sample efficiency”一般是指采样效率,也就是说在单位时间内采集的样本数量的多少,在固定时间内并行强化学习算法采
阅读全文
摘要:参考: 国际劳动妇女节放假吗?女职工还可享受哪些假期? 问:除了妇女节之外,上海女职工还可享受哪些法定假期? 答:孕期、产期、哺乳期(以下简称“三期”)是女职工生活工作中的特殊时期,国家和各地都出台了相应政策以保障女职工三期的休假权益。以上海市为例,女职工生育享受98天产假;符合法律法规规定生育的夫
阅读全文
摘要:前文: signal-slot:python版本的多进程通信的信号与槽机制(编程模式)的库(library) —— 强化学习ppo算法库sample-factory的多进程包装器,实现类似Qt的多进程编程模式(信号与槽机制) —— python3.12版本下成功通过测试 信号与槽机制,是C++的Qt
阅读全文
摘要:什么是 Qt signal-slot库项目地址: https://github.com/alex-petrenko/signal-slot 该库实现的主要原理: 要注意这个项目的library只是对原生的信号与槽机制进行了一定程度的复现,因此和原生的实现还有较大的差距,这个项目主要是项目作者为了给自
阅读全文
摘要:GPU模式下运行pytorch代码报错,pytorch为2.2.1,NVIDIA驱动版本535.161.07 File "/home/devil/anaconda3/envs/sample-factory/lib/python3.11/site-packages/torch/_tensor.py",
阅读全文
摘要:分享链接地址: 算力获新生 | 算力共享,驱动人工智能创新的新引擎
阅读全文
摘要:项目地址: https://github.com/alex-petrenko/faster-fifo 需要注意,该项目给出了两种安装方法,一种是pip从pypi官网安装,一种是从GitHub上的源码安装;经过测试发现这个项目维护程度较差,因此pypi官网上的项目比较落后,因此不建议使用pypi上的安
阅读全文
摘要:不论是什么系统,windows11还是Ubuntu、Centos、RedHat,其运行时都有一个运行模式的概念,其实这个运行模式就是CPU的性能模式,一般可以分为性能模式和省电模式两种,当然也有介于两者之间的一些中间模式,不过这里只讨论这个终点模式。 之所以有这个CPU运行模式这个概念,是因为现在的
阅读全文
摘要:anaconda环境下:强化学习PPO算法仿真环境库sample-factory的python完美适配版本为python3.11 库sample-factory地址: https://github.com/alex-petrenko/sample-factory 文档地址: https://samp
阅读全文



 浙公网安备 33010602011771号
浙公网安备 33010602011771号