

ROS(机器人操作系统)的基本了解
参考:
https://blog.csdn.net/qq_51963216/article/details/125754175
https://zhuanlan.zhihu.com/p/59560621
下图及文字来自(遵循 CC 4.0 BY-SA 版权协议):
https://blog.csdn.net/qq_51963216/article/details/125754175
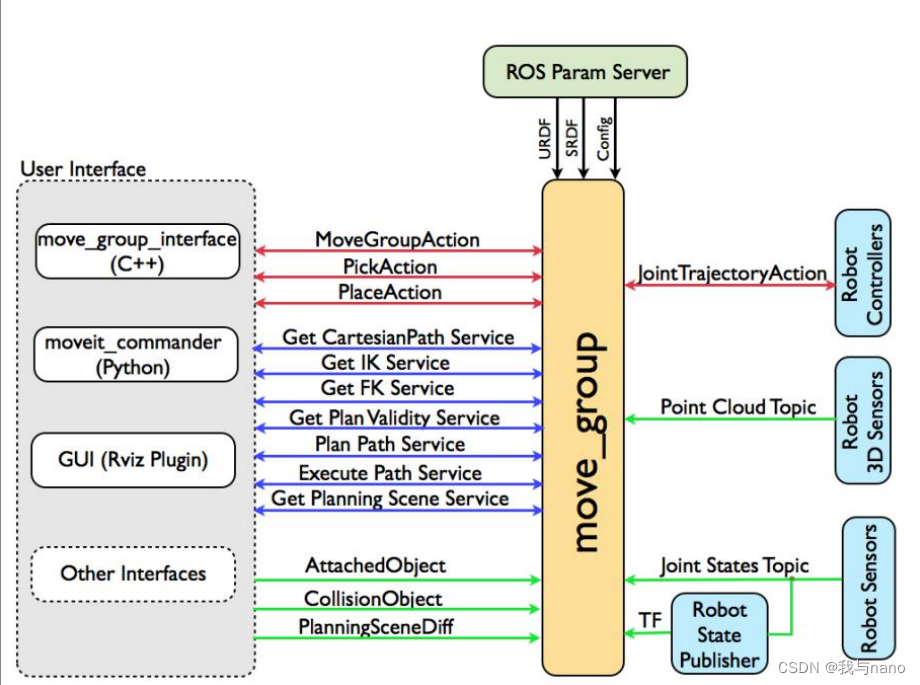
MoveIt由ROS(机器人操作系统)中一系列移动操作的功能包组成,包含运动规划,操作控制,3D感知,运动学,碰撞检测等等,是目前针对移动操作最先进的软件。 它提供了一个易于使用的平台,开发先进的机器人应用程序,评估新的机器人设计和建筑集成的机器人产品。 并且它已经应用于工业、商业、研发和其他领域,是目前被使用最广泛的开源操作软件。 此外,MoveIt提供了一系列成熟的插件和工具,可以实现机械臂控制的快速配置;并且 封装了大量API,方便用户在MoveIt 模块上进行二次开发,进而开发更多创意应用。
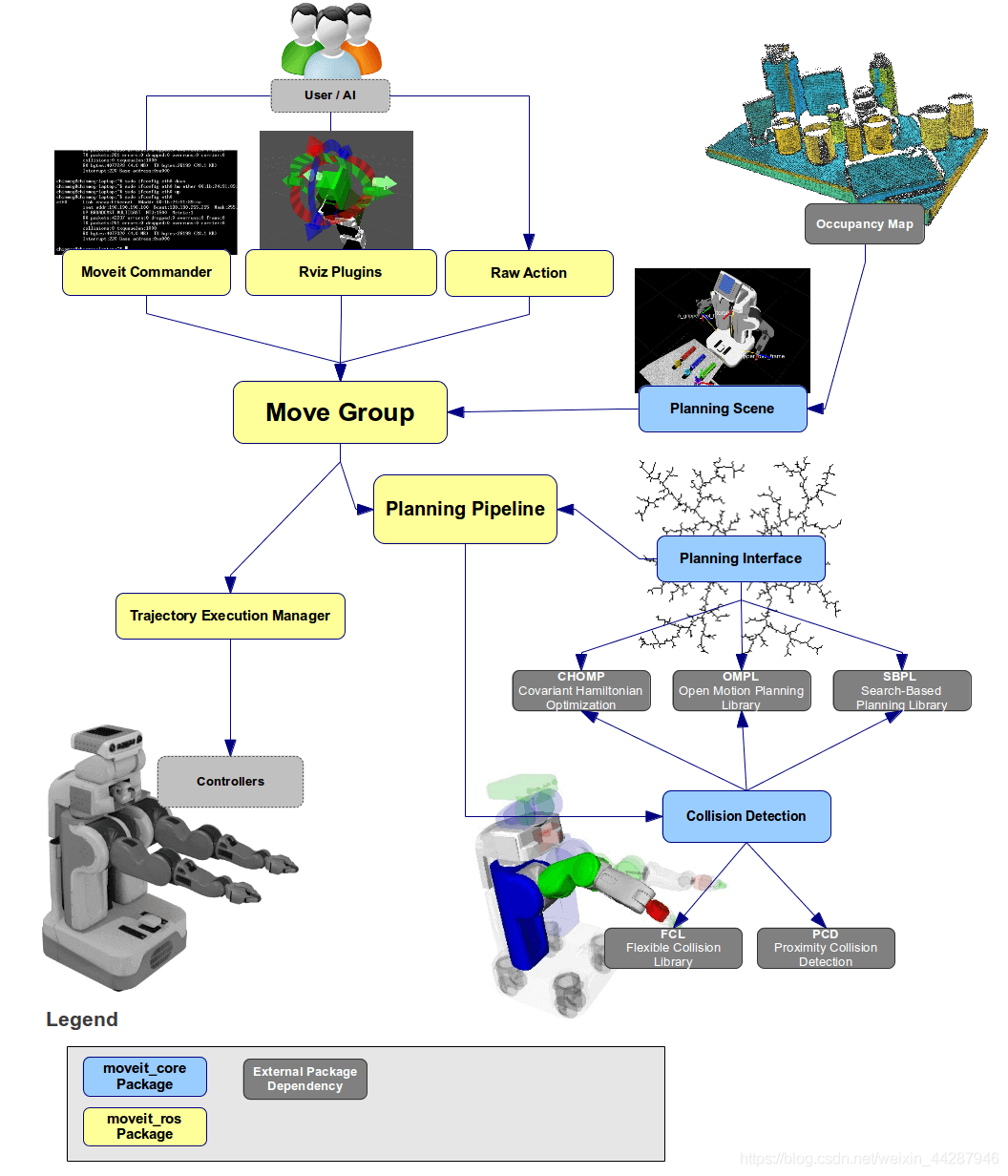
下图来自:https://blog.csdn.net/weixin_44287946/article/details/108108443
相关:
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2024-03-26 15:47 Angry_Panda 阅读(160) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号