

人形机器人(双足机器人)是否可以使用python编写主控代码呢?
做机器人方面的工作,一直在使用C++或者C语言编写的机器人主控代码,有时候也有想过是否可以使用python代码来替代C++语言来编写主控,这样就避免了C++编程所需要的大量时间和人员成本,但是每次冒出这个念头就想到使用python做主控大概率会降低主控代码的运行性能,从而有很大概率导致机器人控制出现问题,不过这个是否会实现自己由于硬件和软件以及经济条件所限制也就一直没有做过验证,因此这个想法也就一直停留于想法阶段。
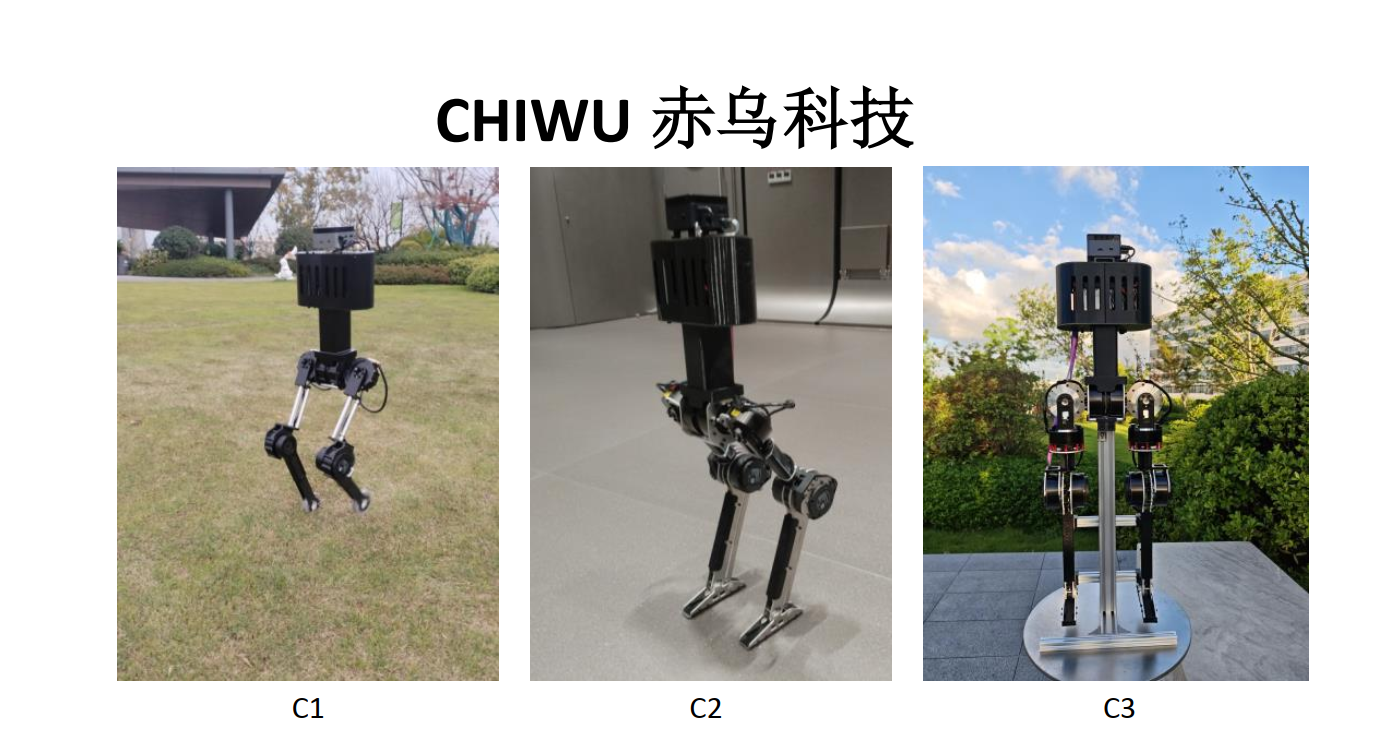
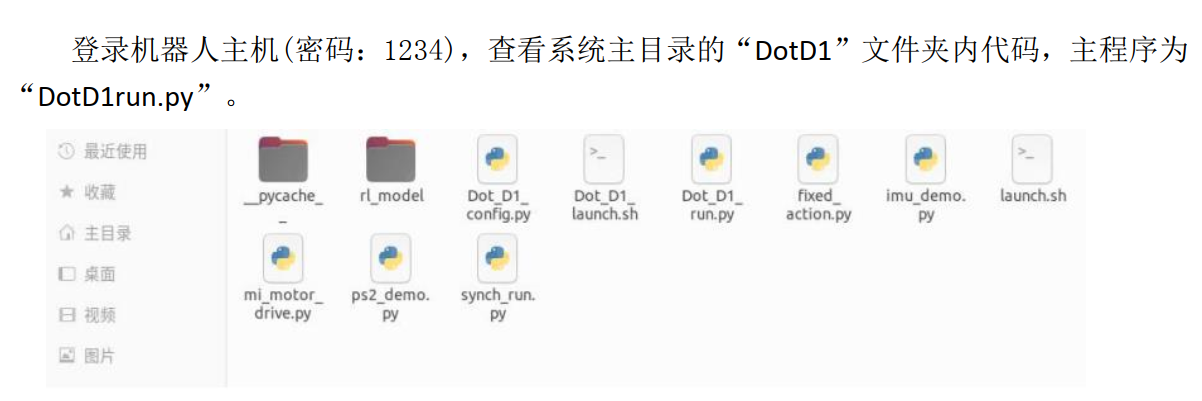
在网上看到了一家做双足机器人(只做行走)硬件公司,看了他们的宣传广告,发现这家公司其实就是使用python代码写的主机上的控制逻辑代码,也就是说该公司是使用python代码来实现主控的,虽然这家公司的机器人只能做一些简单的行走动作,但是对也足以说明对于一些控制逻辑并不是那么复杂的机器人,完全可以使用python代码来做主控开发。
PS:
这家公司的机器人代码实在是过于简单,因此并不能说python就一定可以编写主控,但是这足以说明对于简单逻辑的机器人主控实现来说,完全可以使用python语言来进行实现。


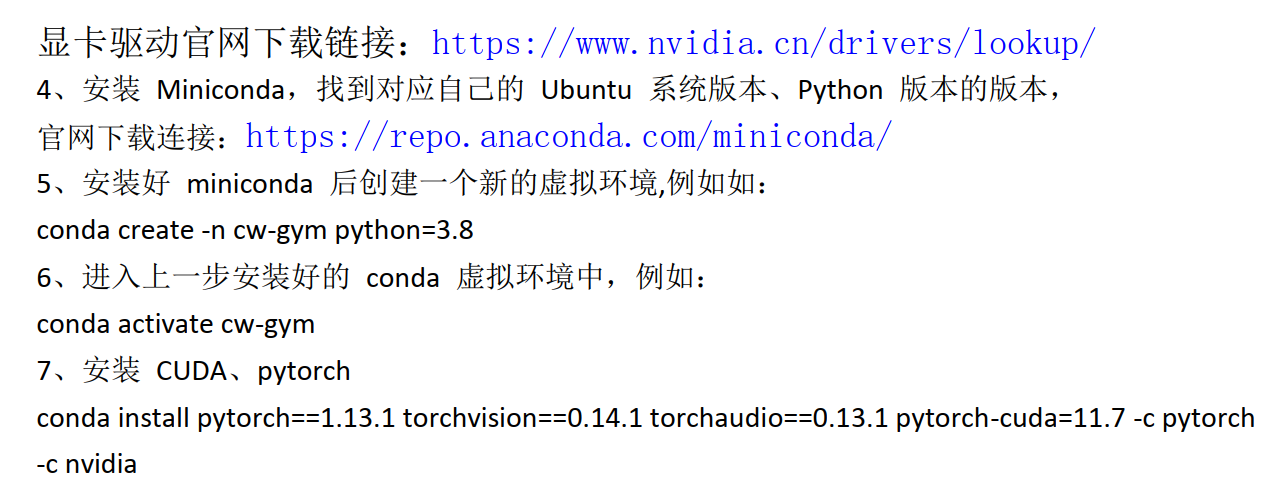
官网下载链接: https://developer.nvidia.com/isaac-gym/download

命令:
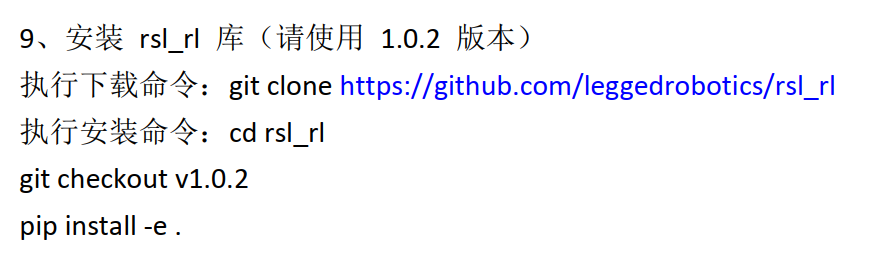
git clone https://github.com/leggedrobotics/rsl_rl



本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2025-10-24 08:00 Angry_Panda 阅读(13) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号