
定位误差降至厘米级、准确识别跟踪动态目标,宇树新专利可提高机器人在复杂环境中的自主作业能力
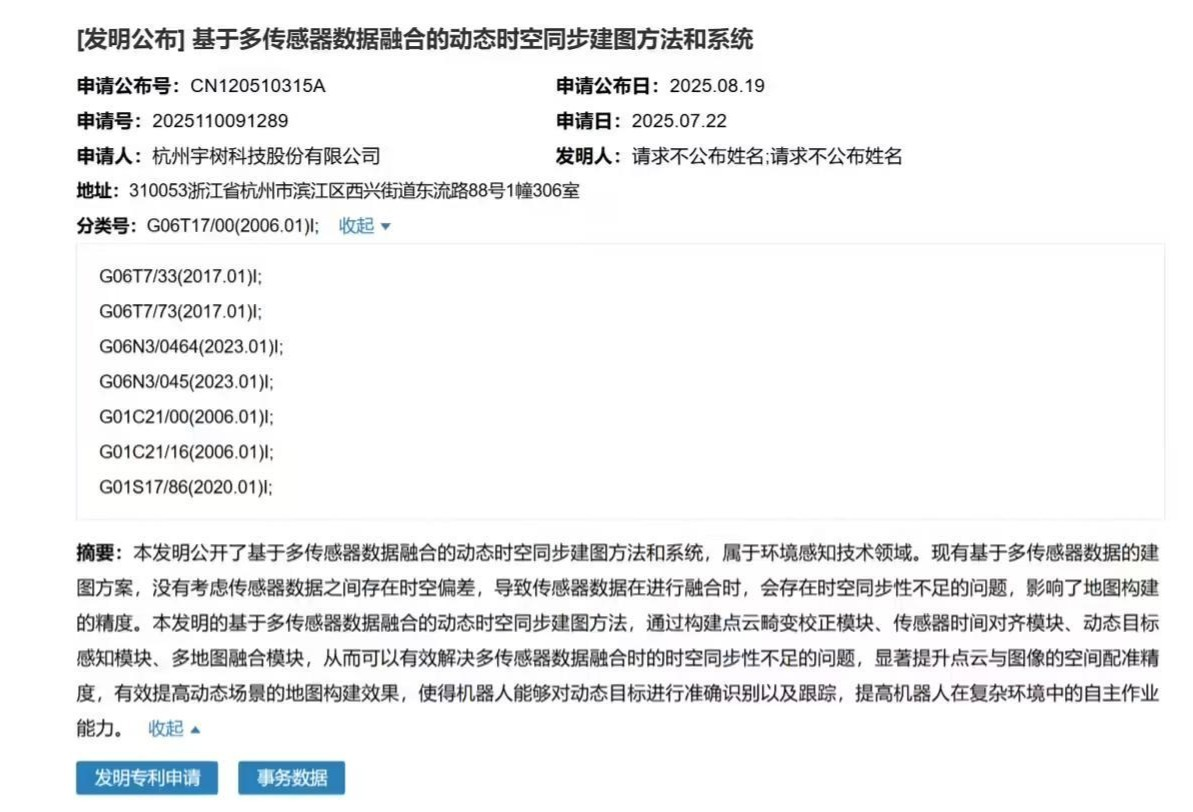
一、提供基于多传感器数据融合的动态时空同步建图方法和系统,可解决多传感器融合时的时空同步性不足问题,显著提升点云与图像的空间配准精度,有效提高动态场景的地图构建效果,使得机器人能够对动态目标进行准确识别以及跟踪。
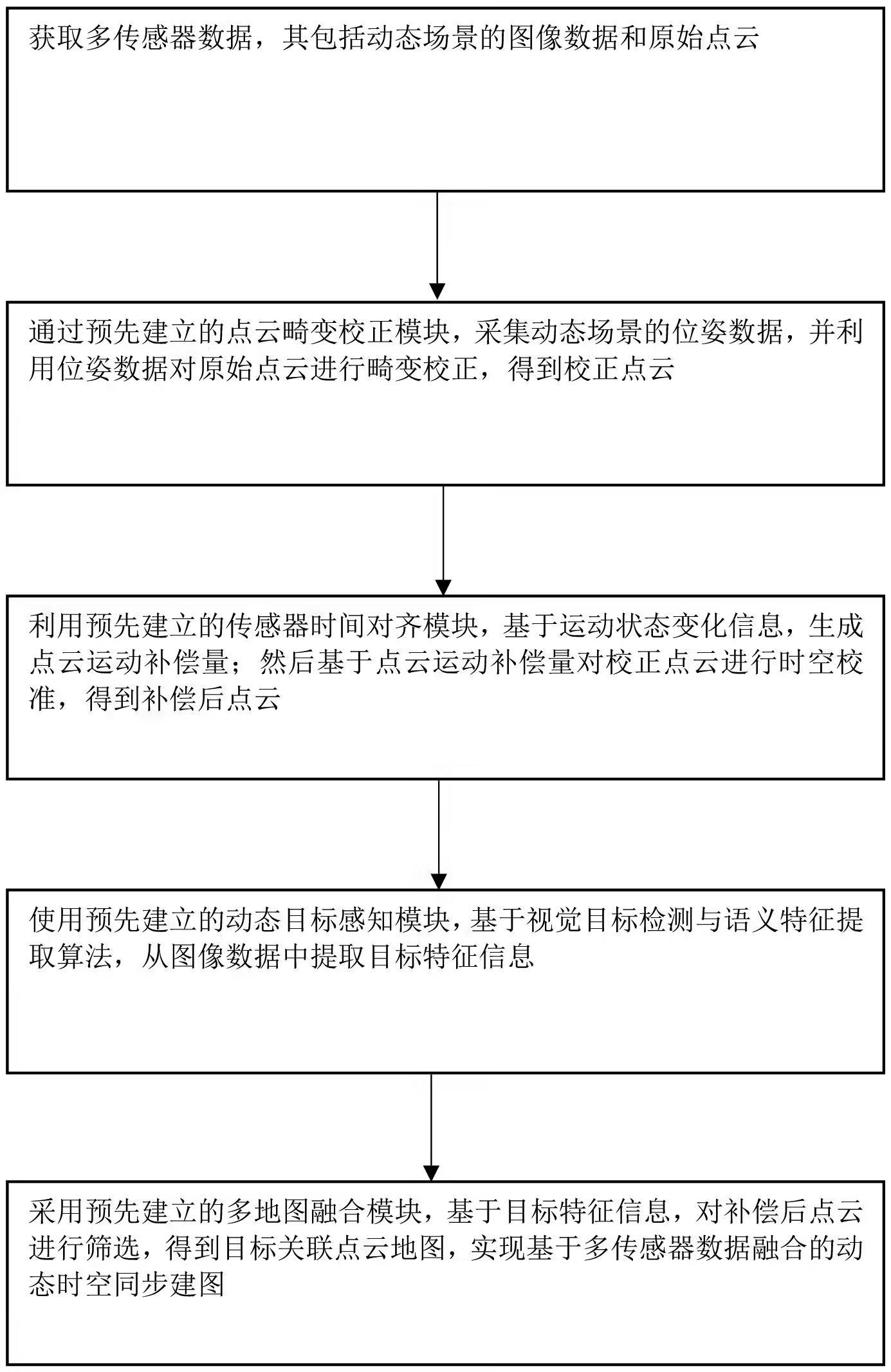
二、于提供基于多传感器数据融合的动态时空同步建图方法和系统,通过位姿数据对点云畸变进行校正,同时利用运动状态变化信息对多传感器的时间戳进行映射,有效解决了动态场景下传感器数据时空错位问题,让定位误差降低至厘米级,有效提升时空同步精度。
本发明公开了基于多传感器数据融合的动态时空同步建图方法和系统,属于环境感知技术领域。现有基于多传感器数据的建图方案,没有考虑传感器数据之间存在时空偏差,导致传感器数据在进行融合时,会存在时空同步性不足的问题,影响了地图构建的精度。本发明的基于多传感器数据融合的动态时空同步建图方法,通过构建点云畸变校正模块、传感器时间对齐模块、动态目标感知模块、多地图融合模块,从而可以有效解决多传感器数据融合时的时空同步性不足的问题,显著提升点云与图像的空间配准精度,有效提高动态场景的地图构建效果,使得机器人能够对动态目标进行准确识别以及跟踪,提高机器人在复杂环境中的自主作业能力。
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2025-09-04 11:24 Angry_Panda 阅读(17) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号