

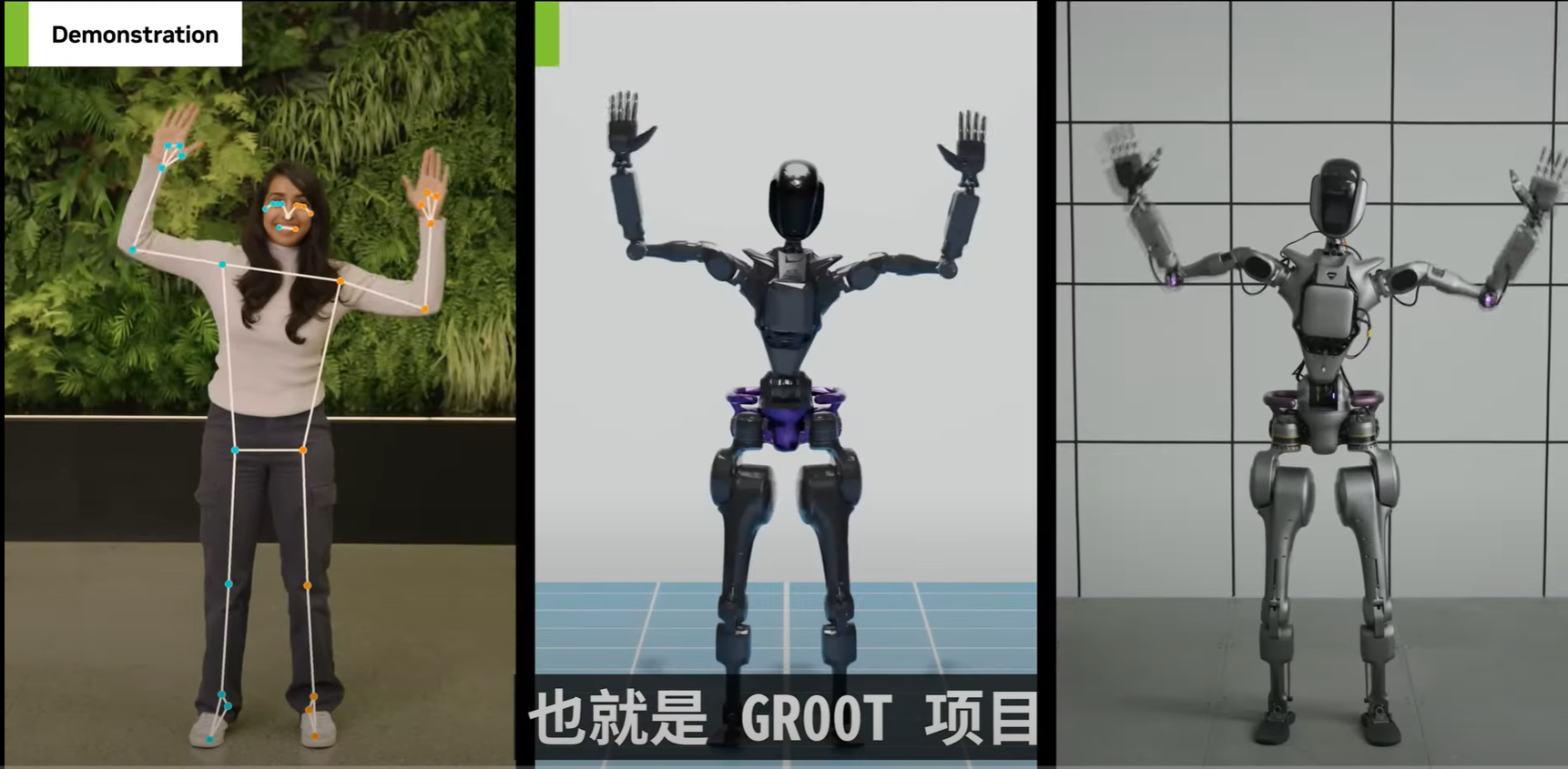
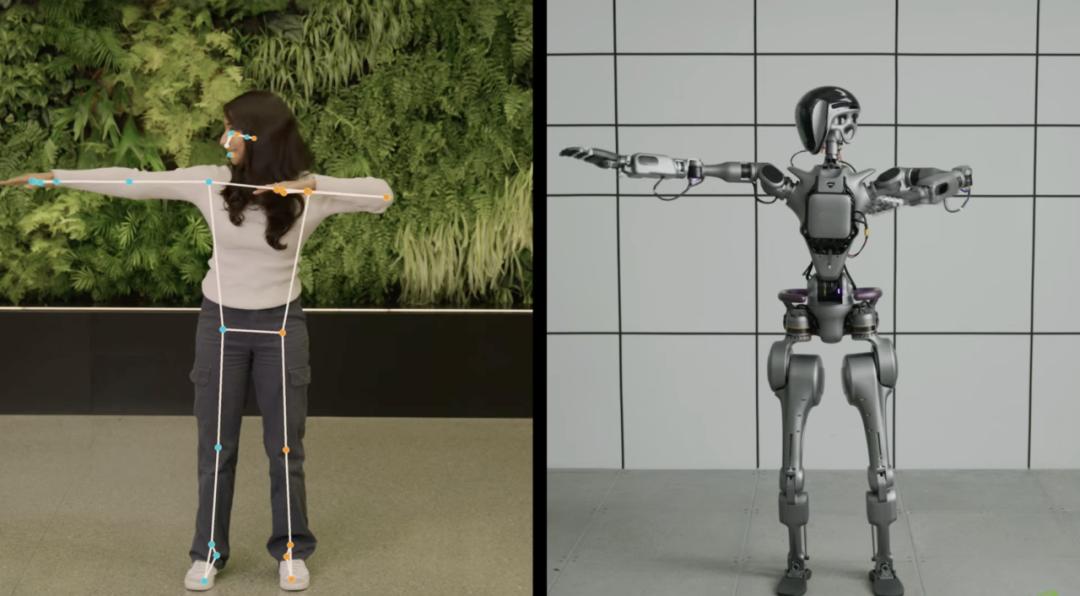
人形机器人:使用人体姿态识别的方法来训练人形机器人
使用模仿学习来训练人形机器人。
如何获取人类的演示数据呢?
-
直接方式。通过VR或AR的虚拟现实的技术进行远程控制机器人,这样可以获得实时的人类的数据,而且还是人类控制机器人的数据。
-
间接方式。通过人类姿态识别的方式,该种方式效果肯定不如上一种的好,不过其优势就是方便,便宜,不需要复杂且昂贵的机器人远程操控设备。并且不像上一种方式中往往需要操纵机器人的人类需要与机器人有着相似的体态身高这样的要求,可以说该种方式是门槛最低的,不过其性能和精度也是最差的。需要注意的是,该种方式是人形机器人发展初期所使用的方法,目前该种方法并不是主流。
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2025-03-01 20:47 Angry_Panda 阅读(74) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号