

人形机器人机械臂和灵巧手的空间感知、物体识别、具体操作的流程图
下图来自NVIDIA官方的流程图,这里以此作为借鉴:
https://developer.download.nvidia.com/images/isaac/isaac-manipulator-simplified-workflow.svg
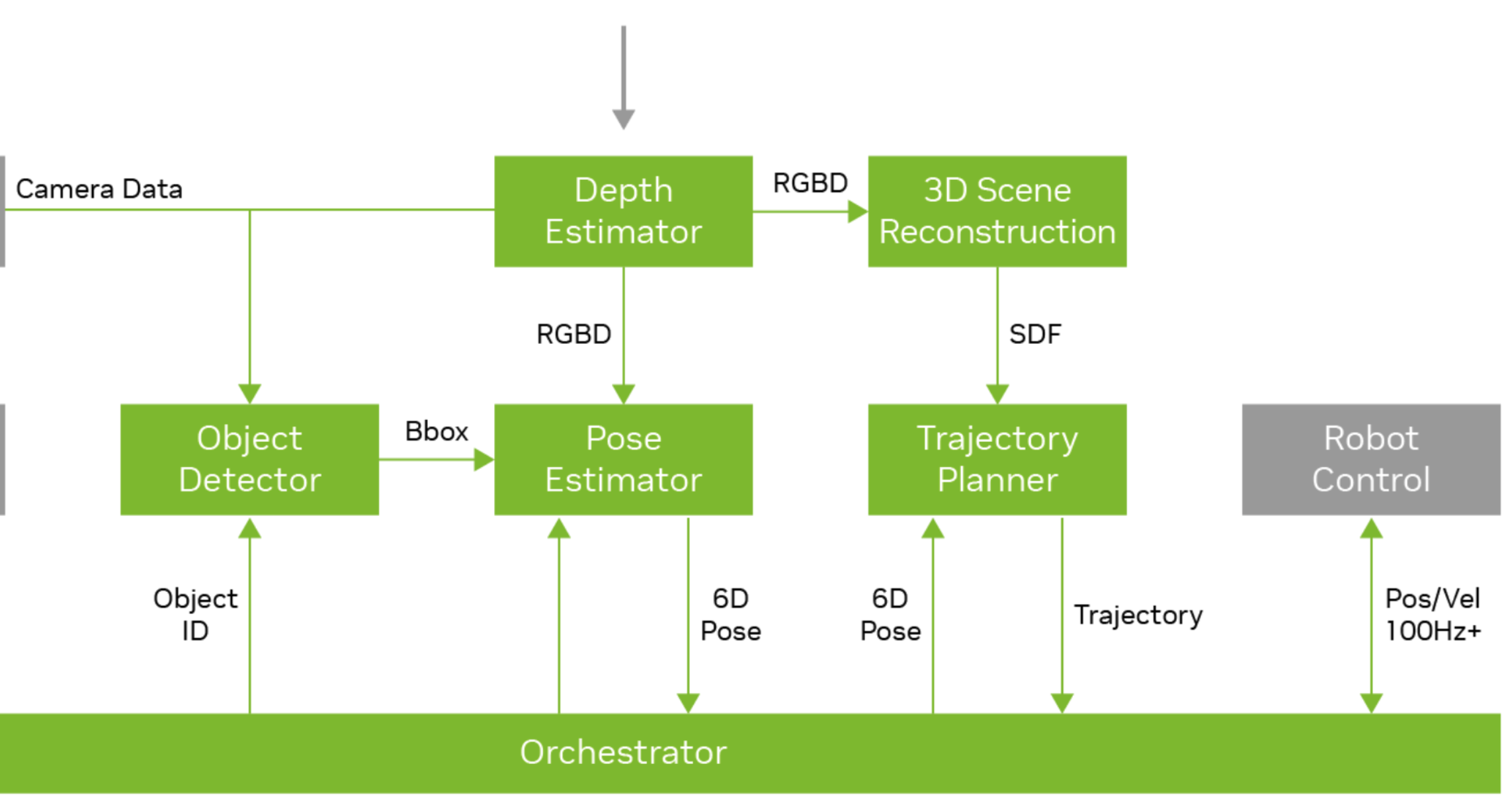
这个流程图的重点就是先对环境和物体进行感知,通过视觉传感器获得RGBD图像,然后判断其6D Pose,在这一步的Pose Estimator完成后将6D Pose信息进行处理,以此进行Trajectory Planner,获得下一时间步的机器臂和灵巧手的轨迹规划,然后将规划好的信息发送给Robot的终端执行器,即手臂和灵巧手。
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2024-05-06 18:31 Angry_Panda 阅读(272) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号