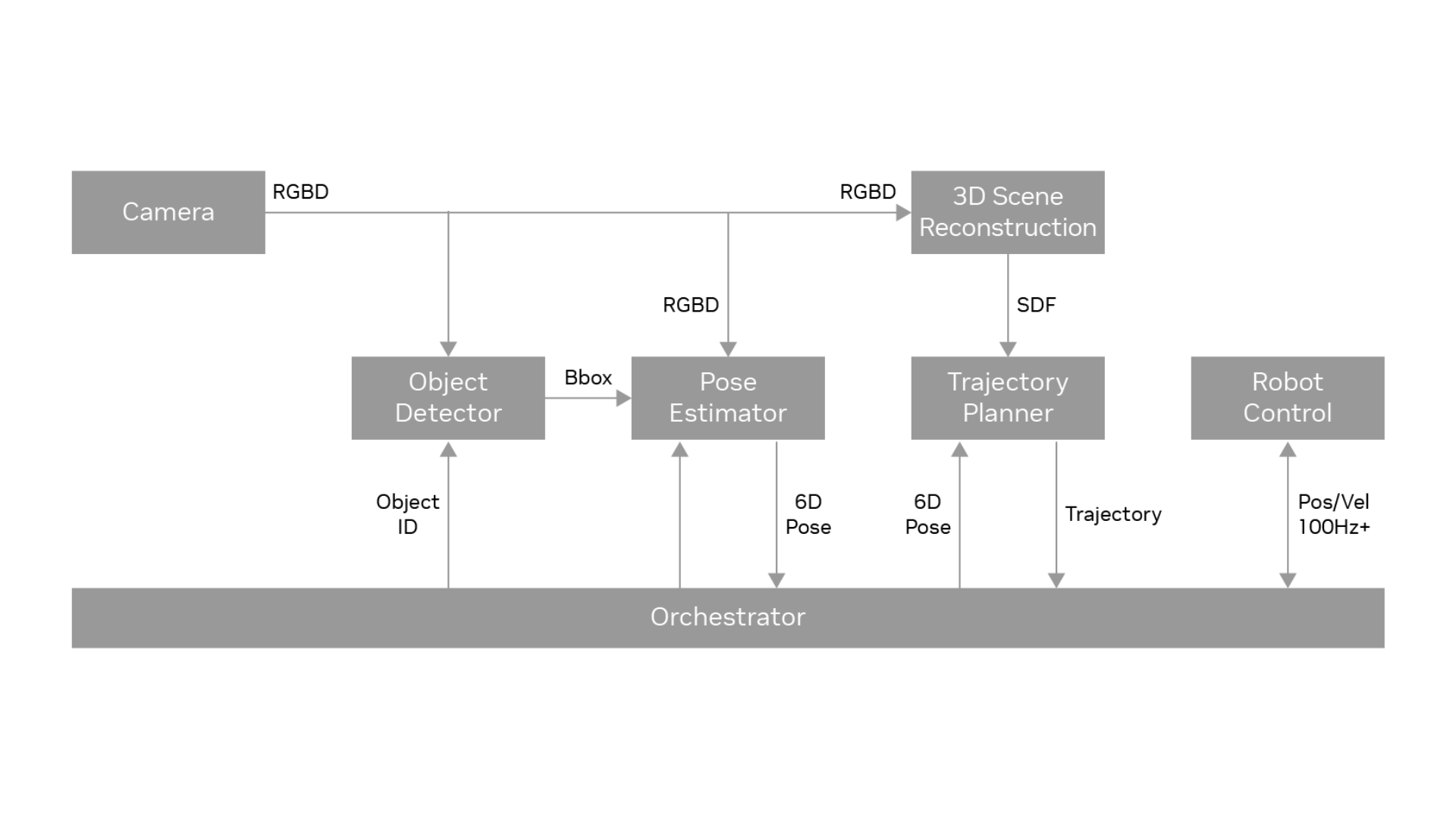
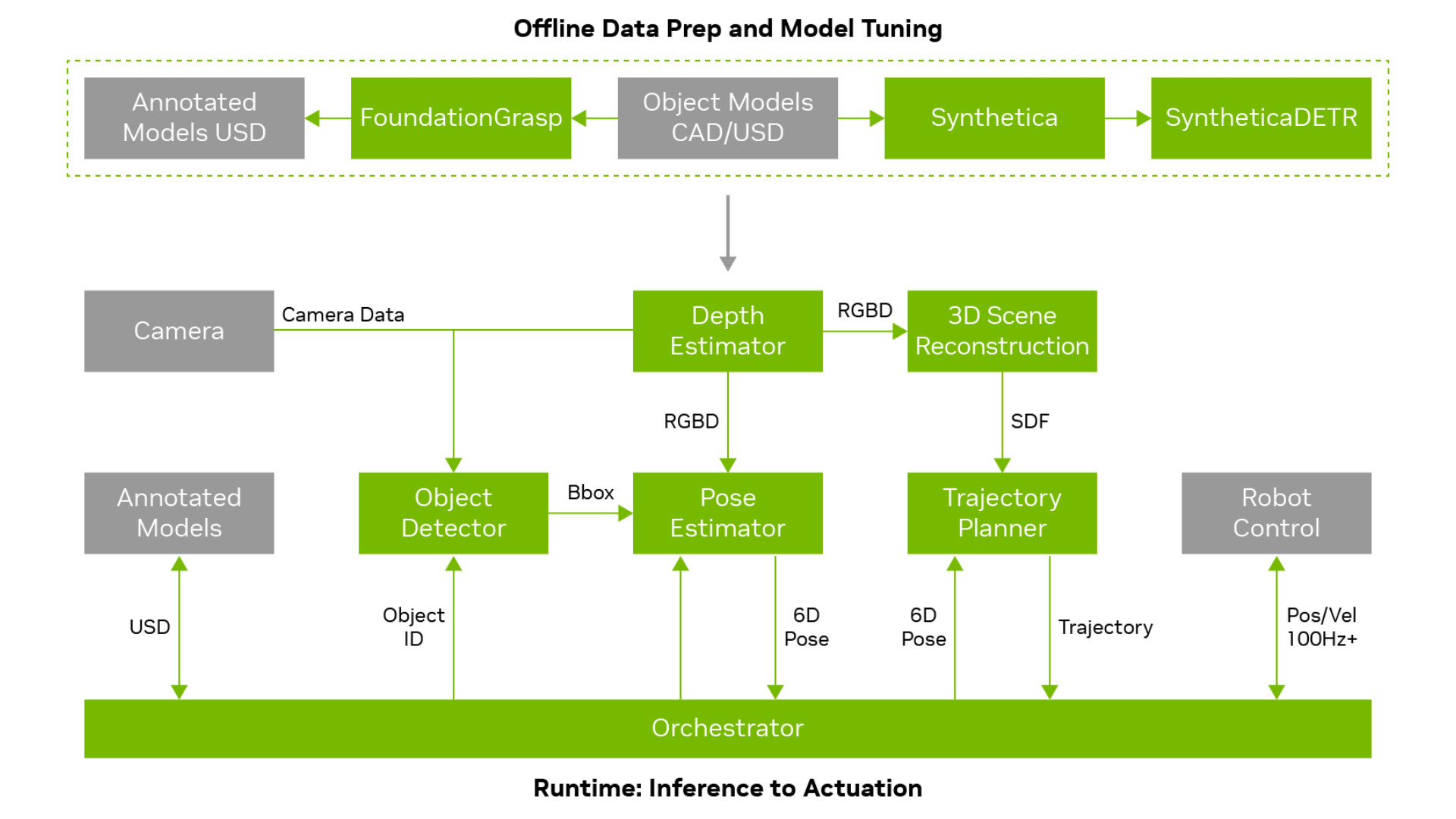
人形机器人 —— NVIDIA公司给出的操作算法(动态操作任务,dynamic manipulation tasks)(机械手臂/灵巧手)框架示意图 —— NVIDIA Isaac Manipulator
原文:
https://developer.nvidia.com/isaac/manipulator#foundation-models
NVIDIA公司准备针对人形机器人的各部分操作分别推出一个AI框架,如:步态控制、3D感知、抓取操作、避障和规划,等等,本文介绍的就是NVIDIA计划推出的操作任务的算法的AI框架(manipulation tasks)。
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2024-04-21 12:33 Angry_Panda 阅读(195) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号