

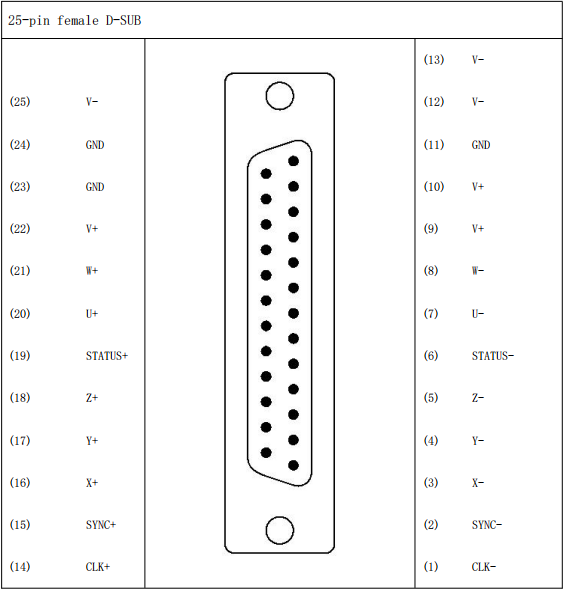
XY2-100以及XY2-100E协议广泛应用于振镜控制系统。该协议信号采用差分传输的方式进行,主要包含了同步、时钟、XYZ坐标数据、状态等信号线。常规的采用了DB25插头(或IDC连接器)的物理接口形式。
DB25插头:
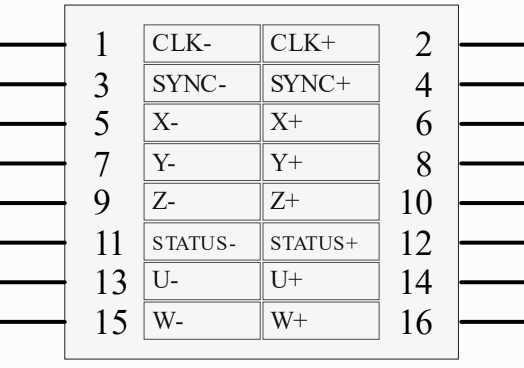
IDC连接器:
数据帧的时序
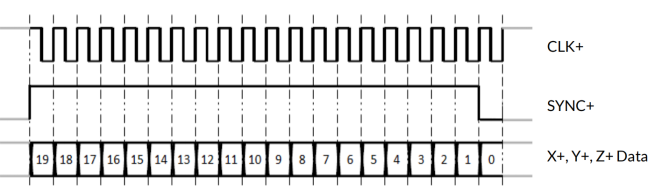
XY2-100数据组成
BACK(STATUS):
|
BIT19 |
BIT18 |
BIT17 |
BIT16 |
BIT15 |
BIT14 |
BIT13 |
BIT12 |
BIT11 |
BIT10 |
|
0 |
0 |
1 |
PSO |
Pulse |
X ready |
Y ready |
Z ready |
|
|
|
BIT9 |
BIT8 |
BIT7 |
BIT6 |
BIT5 |
BIT4 |
BIT3 |
BIT2 |
BIT1 |
BIT0 |
|
X error |
Y error |
Z error |
|
|
|
|
|
|
Pe |
X/Y/Z/U/W(16-bit)位置信号:
|
BIT19 |
BIT18 |
BIT17 |
BIT16 |
BIT15 |
BIT14 |
BIT13 |
BIT12 |
BIT11 |
BIT10 |
|
0 |
0 |
1 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
|
BIT9 |
BIT8 |
BIT7 |
BIT6 |
BIT5 |
BIT4 |
BIT3 |
BIT2 |
BIT1 |
BIT0 |
|
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Pe |
XY2-100E数据组成
与XY2-100的协议最大的差异在于X/Y/Z位置信号扩展到18bit。
BACK(STATUS):
|
BIT19 |
BIT18 |
BIT17 |
BIT16 |
BIT15 |
BIT14 |
BIT13 |
BIT12 |
BIT11 |
BIT10 |
|
1 |
|
|
PSO |
Pulse |
X ready |
Y ready |
Z ready |
|
|
|
BIT9 |
BIT8 |
BIT7 |
BIT6 |
BIT5 |
BIT4 |
BIT3 |
BIT2 |
BIT1 |
BIT0 |
|
X error |
Y error |
Z error |
|
|
|
|
|
|
Po |
X/Y/Z/U/W(18-bit)位置信号:
|
BIT19 |
BIT18 |
BIT17 |
BIT16 |
BIT15 |
BIT14 |
BIT13 |
BIT12 |
BIT11 |
BIT10 |
|
1 |
D17 |
D16 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
|
BIT9 |
BIT8 |
BIT7 |
BIT6 |
BIT5 |
BIT4 |
BIT3 |
BIT2 |
BIT1 |
BIT0 |
|
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Po |
其中的术语或缩写:
Ready : X/Y/Z位置到位状态
Error : X/Y/Z故障指示
Pulse: 散点脉冲
PSO: 同步位置信号状态输出
Pe : Parity even.奇偶校验位(当发送的数 据中有偶数个“1”时,对应的校验位为“0”。当发送的数据中有奇数个“1”时对应的校验位为“1”)
Po : Parity odd.奇偶校验位
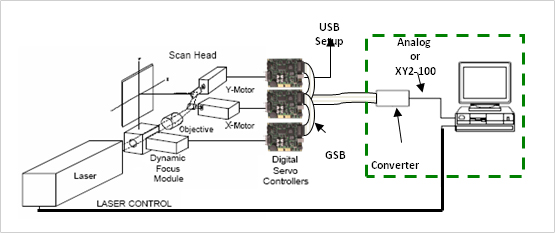
使用案例
基于XY2-100一套完整的应用形式举例如下。包括一个支持XY2-100协议的控制板,用于转换PC机的XY信号。
包括支持XY2-100协议的振镜数字驱动板,用于驱动振镜电机到指定的位置。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号