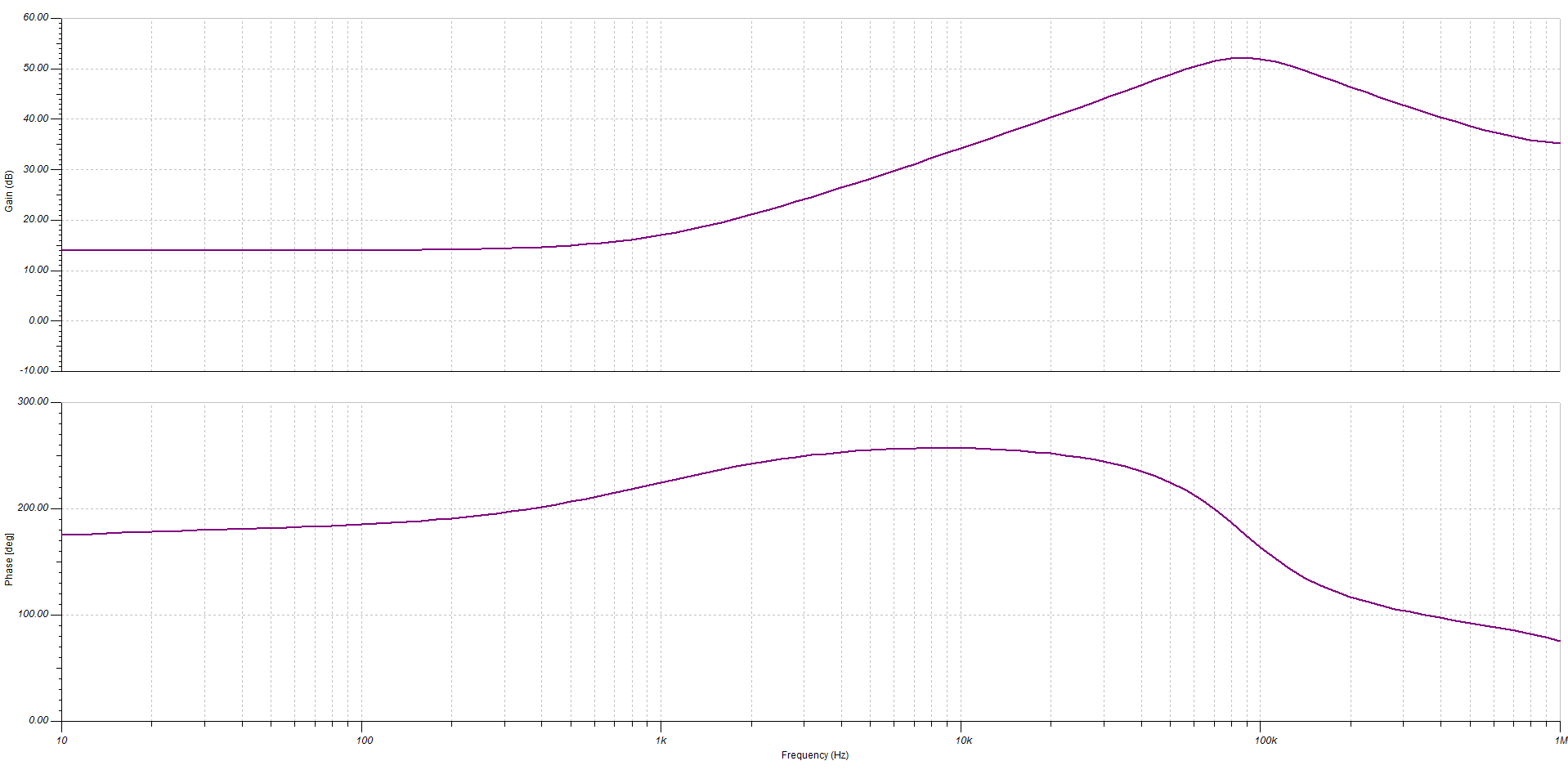
PID波特图
可以看出Kd和Ki对不同频率的增益和相位影响差别很大。在温度控制中,输入误差的频率很低,Kd分量几乎忽略不计,主要需要调节Kp和Ki的值。
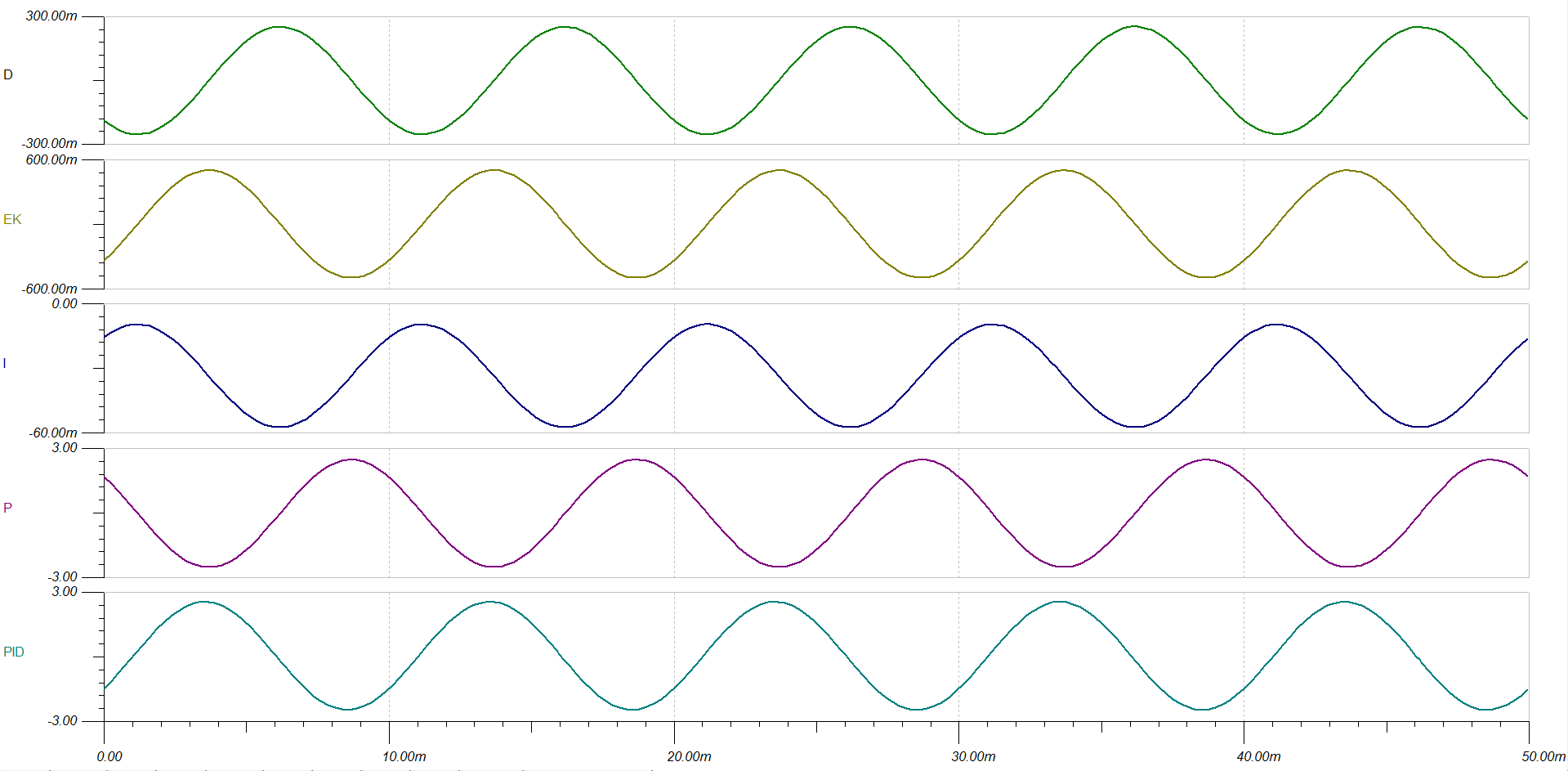
KP,KI,KD以及Ek等各路信号(100Hz时)
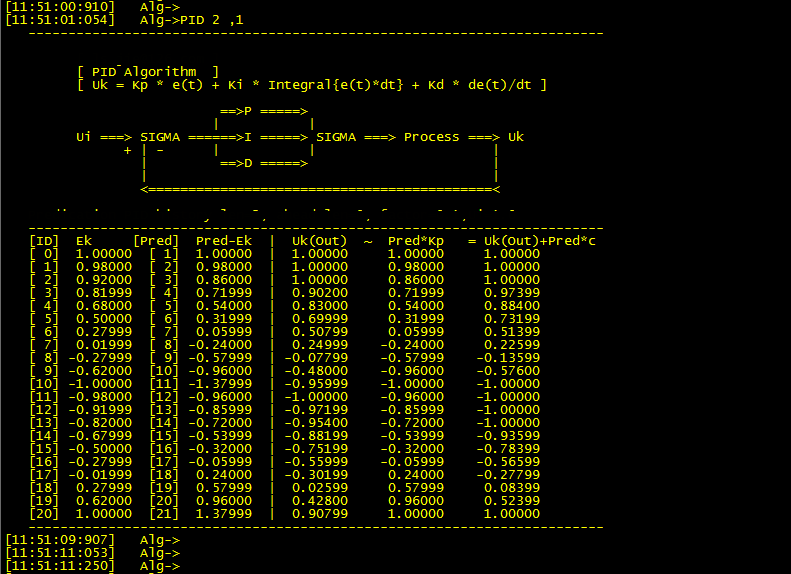
嵌入式平台对数字PID算法(前馈控制)的模拟:



 浙公网安备 33010602011771号
浙公网安备 33010602011771号