
刚体就是 "刚性物体",它在运动过程中,内部各质点间的相对位置不会改变,也即 每两个质点间的距离 保持不变
假设刚体内任意两个质点,坐标分别为 $(x_1, y_1, z_1)$ 和 $(x_2, y_2, z_2)$,则在刚体运动过程中,它们满足如下条件:
$\quad \left( (x_1 - x_2)^2 + (y_1 - y_2)^2 + (z_1 - z_2)^2 \right) |_t = l^2$
例如:影视剧《西游记》中的法宝金刚琢、玉净瓶是刚体;而幌金绳、芭蕉扇等,则不是刚体
1 刚体变换
1.1 矩阵形式
OpenCV 之 图像几何变换 中的等距变换,实际是二维刚体变换
$\quad \begin{bmatrix} x^{\prime} \\ y^{\prime} \\ 1 \end{bmatrix} = \begin{bmatrix} \cos \theta & -\sin \theta & t_x \\ \sin \theta & \cos \theta & t_y \\ 0&0&1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1\end{bmatrix}$
从平面推及空间,三维刚体变换的矩阵形式为
$\quad \begin{bmatrix}x' \\ y' \\ z' \\ 1 \end{bmatrix}=\begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} &t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\z \\ 1\end{bmatrix} $
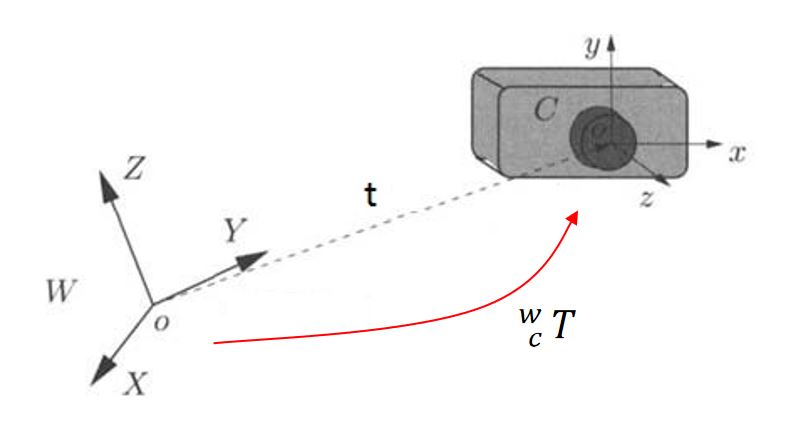
例如:空间中一点,在相机坐标系中为 $^cP$,求其在世界坐标系中的坐标 $^wP$,则有 $^wP = R \bm{\cdot} {^cP} + t$
其中,坐标系 {W} -> {C} 就是一个刚体变换,可记为 $^w_cT$
1.2 约束分析
$R$ 和 $t$ 共有 12 个未知数,但 R 是标准正交矩阵,自带 6 个约束方程,则刚体变换有 12 - 6 = 6 个自由度 (和直观的感受一致)
表面上看,似乎只需 2 组空间对应点,联立 6 个方程,便可求得 6 个未知数,但这 6 个方程是有冗余的 (因为这 2 组对应点,在各自的坐标系下,两点之间的距离是相等的)
因此,第 2 组对应点,只是提供了 2 个约束方程,加上第 1 组对应点的 3 个约束,共有 5 个独立的方程
显然,还需要第 3 组对应点,提供 1 个独立的方程,才能求出 R 和 t
如图所示,两个刚体之间:1个点重合 => 3个自由度;2个点重合 => 1个自由度;3个点重合=> 0个自由度

OpenCV 中有一个函数 estimateAffine3D() 可求解刚体变换的矩阵
1.3 直观理解
一个单位立方体,可在 X-Y-Z 坐标系中自由运动,则运动前后的转换关系,可视为刚体变换
单点重合:当立方体的角点 0 和 X-Y-Z 坐标系的原点 O 重合时,立方体还能自由的旋转 (X 轴 -> Y 轴 -> Z 轴)

两点重合:除了立方体的角点 0 和坐标系的 原点 O 重合外,再令角点 4 和 X 轴上的某点重合,则此时立方体只能 绕 X 轴旋转
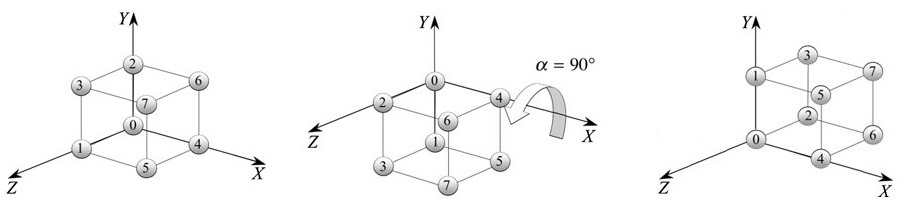
三点重合:除了以上两个角点 0 和 4,如果再使角点 1 和 Z 轴上的某点重合,则立方体就会和 X-Y-Z 坐标系 牢牢的连接在一起
因此,选取不共面的三组对应点,联立方程组,便可求得 R 和 T
2 旋转向量
任意的旋转,都可用一个旋转轴 (axis) 和 绕轴旋转角 (angle) 来描述,简称“轴角”
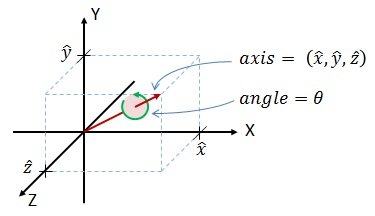
因此,可用一个方向和旋转轴一致,长度等于旋转角的向量来表示旋转,这个向量称为旋转向量 (或“旋量”)
假定旋转轴 $\mathbf{n} = [r_{x}, r_{y}, r_{z}]$,旋转角 $\theta$,则旋转向量为 $\theta \mathbf{n}$;旋转向量到旋转矩阵的转换,可由罗德里格斯公式实现,如下:
$\quad R = cos(\theta) I + (1 - cos \theta) \mathbf{nn^T} + sin \theta \begin{bmatrix} 0&-r_z&r_y \\ r_z&0&-r_x \\ -r_y&r_x&0 \end{bmatrix}$
反之,从旋转矩阵到旋量,公式如下:
$\quad \sin \theta \begin{bmatrix}0 &-r_z&r_y \\r_z&0&-r_x \\-r_y & r_x &0 \end{bmatrix} = \dfrac{R - R^T}{2} $
OpenCV 中有一个 Rodrigues() 函数,可实现二者的相互转换
void Rodrigues (
InputArray src, // 输入旋转向量 n(3x1 或 1x3) 或 旋转矩阵 R(3x3)
OutputArray dst, // 输出旋转矩阵 R 或 旋转向量 n
OutputArray jacobian = noArray() // 可选,输出 Jacobian 矩阵(3x9 或 9x3)
)
3 欧拉角
3.1 定义
假定平面内有一点 P, 旋转 $\theta$ 角到 $P^{\prime}$ 位置,如下图:
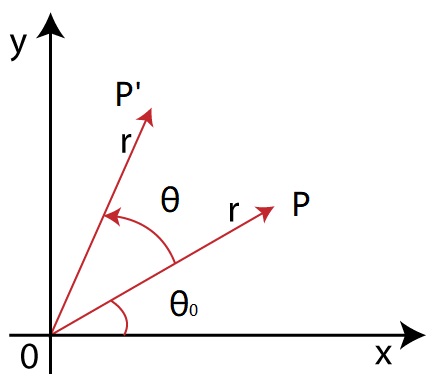
取 $\angle$POX = $\theta_0$,列方程组得
$\quad x^{\prime} = r \cos (\theta_0 + \theta) = r \cos \theta_0 \cos\theta - r \sin \theta_0 \sin\theta = x \cos\theta - y \sin \theta $
$\quad y^{\prime} = r \sin(\theta_0+ \theta) = r \sin\theta_0 cos \theta + r \cos \theta_0 \sin\theta = x \sin \theta + y \cos \theta $
转化为矩阵形式 $ \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} cos \theta & -sin \theta \\ sin \theta & cos \theta \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}$
3.2 欧拉角
将二维旋转矩阵 $R_{2 \times 2}$ 扩展到三维空间
1)绕 Z 轴旋转 roll,则添加 z 坐标 $\pmb{R_z} = \begin{bmatrix} cos \theta_z & -sin \theta_z & 0 \\ sin \theta_z & cos \theta_z & 0 \\ 0&0&1 \end{bmatrix}$

2)绕 Y 轴旋转 yaw,则添加 y 坐标 $\pmb{R_y} = \begin{bmatrix} cos \theta_y & 0 & \color{blue}{sin \theta_y} \\ 0 & 1 & 0 \\ \color{blue}{-sin \theta_y} & 0 & cos \theta_y \end{bmatrix}$
3)绕 X 轴旋转 pitch,则添加 x 坐标 $\pmb{R_x} = \begin{bmatrix} 1 & 0 & 0 \\ 0 &cos \theta_x & -sin \theta_x \\ 0 & sin \theta_x & cos \theta_x \end{bmatrix}$
因此,当按 Z-Y-X 的顺序旋转时,一个旋转矩阵就被分解成了绕不同轴的三次旋转,旋转角称为 "欧拉角"
$\quad R = R_z \cdot R_y \cdot R_x = \begin{bmatrix} cos \theta_y cos \theta_z & sin \theta_x sin \theta_y cos \theta_z - cos \theta_x sin \theta_z & sin \theta_x sin \theta_z + cos \theta_x sin \theta_y cos \theta_z \\ cos \theta_y sin \theta_z & cos \theta_x cos \theta_z + sin \theta_x sin \theta_y sin \theta_z & cos \theta_x sin \theta_y sin \theta_z - sin \theta_x cos \theta_z \\ -sin \theta_y & sin \theta_x cos \theta_y & cos \theta_x cos \theta_y \end{bmatrix} $,
注意:在使用欧拉角时,要先指明旋转的顺序,因为绕不同的轴旋转时得到的欧拉角也不同
反之,由旋转矩阵求解欧拉角,则有:
$\quad \theta_x = tan^{-1} (\dfrac{r_{32}}{r_{33}})$
$\quad \theta_y = sin^{-1} (-r_{33})$
$\quad \theta_z = tan^{-1} (\dfrac{r_{21}}{r_{11}})$
3.3 代码实现
已知绕三个轴旋转的欧拉角,要转换为旋转矩阵,直接套用公式
Mat eulerAnglesToRotationMatrix(Vec3f &theta)
{
// Calculate rotation about x axis
Mat R_x = (Mat_<double>(3,3) <<
1, 0, 0,
0, cos(theta[0]), -sin(theta[0]),
0, sin(theta[0]), cos(theta[0]) );
// Calculate rotation about y axis
Mat R_y = (Mat_<double>(3,3) <<
cos(theta[1]), 0, sin(theta[1]),
0, 1, 0,
-sin(theta[1]), 0, cos(theta[1]) );
// Calculate rotation about z axis
Mat R_z = (Mat_<double>(3,3) <<
cos(theta[2]), -sin(theta[2]), 0,
sin(theta[2]), cos(theta[2]), 0,
0, 0, 1 );
// Combined rotation matrix
Mat R = R_z * R_y * R_x;
return R;
}
旋转矩阵到欧拉角的转换,要指明旋转顺序 (Z-Y-X 或 X-Y-Z 等 6 种),下面代码实现了和 MATLAB 中 rotm2euler 一样的功能,只是旋转顺序不同 (X-Y-Z)
// Checks if a matrix is a valid rotation matrix.
bool isRotationMatrix(Mat &R)
{
Mat Rt;
transpose(R, Rt);
Mat shouldBeIdentity = Rt * R;
Mat I = Mat::eye(3,3, shouldBeIdentity.type());
return norm(I, shouldBeIdentity) < 1e-6;
}
// The result is the same as MATLAB except the order of the euler angles ( x and z are swapped ).
Vec3f rotationMatrixToEulerAngles(Mat &R)
{
assert(isRotationMatrix(R));
float sy = sqrt(R.at<double>(0,0) * R.at<double>(0,0) + R.at<double>(1,0) * R.at<double>(1,0) );
bool singular = sy < 1e-6; // If
float x, y, z;
if (!singular) {
x = atan2(R.at<double>(2,1) , R.at<double>(2,2));
y = atan2(-R.at<double>(2,0), sy);
z = atan2(R.at<double>(1,0), R.at<double>(0,0));
} else {
x = atan2(-R.at<double>(1,2), R.at<double>(1,1));
y = atan2(-R.at<double>(2,0), sy);
z = 0;
}
return Vec3f(x, y, z);
}
4 四元数
4.1 定义
四元数本质是一种高阶的复数,普通复数有一个实部和一个虚部,而四元数有一个实部和三个虚部
$\quad q = s + x \mathbf{i} + y \mathbf{j} + z \mathbf{k}$,其中 $\mathbf{i}^2=\mathbf{j}^2=\mathbf{k}^2=\mathbf{ijk}=-1$
平面中任一点的旋转,可通过“左乘” 旋转向量来表示,如下:
$\quad p = a + b \mathbf{i} $,$q = cos \theta + \mathbf{i} sin \theta$
$\quad p^{\prime} = qp = a\cos\theta-b\sin\theta+(a\sin\theta+b\cos\theta)i $
推及空间中任一点的旋转,可通过“左乘”四元数来表示,如下:
$\quad p = [0, a \mathbf{i} + b \mathbf{j} + c \mathbf{k}]$,$q = [cos \theta, sin \theta \mathbf{v} ]$,其中 $\mathbf{v}$ 由 $\mathbf{i}, \mathbf{j}, \mathbf{k}$ 组合而成
$\quad p^{\prime} = qp$
4.2 实例
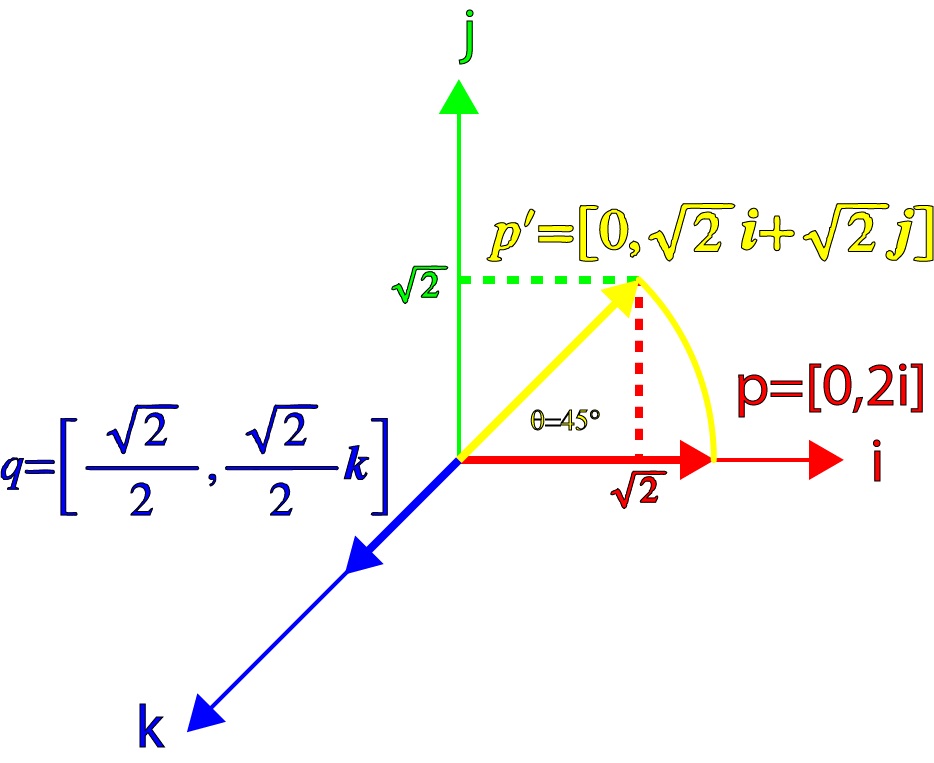
例1:当向量 p 围绕 k 轴在 i-j 平面内旋转 45°,表示该旋转的四元数为
$\quad q = \left[\dfrac{\sqrt{2}}{2}, \dfrac{\sqrt{2}}{2} \mathbf{k} \right] $
取 $p = [0, 2 \mathbf{i}]$,则 $p^{\prime} = qp = [0, \sqrt{2}\mathbf{i} + \sqrt{2} \mathbf{j}] $,如下图 p' 确实是 p 围绕 $\mathbf{k}$ 轴旋转 45° 得到的
例2:当向量 p 围绕 q 旋转 45°,且 q 中的向量 v 在 i-k 平面内和 p 成 45° 时,表示该旋转的四元数为
$\quad q = \left[ \dfrac{\sqrt{2}}{2}, \dfrac{\sqrt{2}}{2} \left(\dfrac{\sqrt{2}}{2} \mathbf{i} + \dfrac{\sqrt{2}}{2} \mathbf{k} \right) \right]$
取 $p = [0, 2 \mathbf{i}]$,则 $p^{\prime} = qp = [-1,\sqrt{2}\mathbf{i}+\mathbf{j}]$,可看出 $p^{\prime}$ 中向量模长为 $\sqrt{3}$,这不再是一个纯旋转的变换

但如果再“右乘” $q^{-1}$,则 $p^{\prime} = qpq^{-1} = [0,\mathbf{i}+\sqrt{2}\mathbf{j}+\mathbf{k} ]$,如下图,这又变成了一个纯旋转,但是旋转的角度是 90° 不是 45°

综上所述,向量 p 围绕任一轴 $\mathbf{v}$ 旋转 $\theta$,则表示该旋转的四元数形式为
$\quad q=\left[\cos\dfrac{\theta}{2},\sin\dfrac{\theta}{2} \mathbf{v}\right] $
4.3 转换关系
假定四元数 $q = s + x \mathbf{i} + y \mathbf{j} + z \mathbf{k}$,则旋转矩阵为
$\quad R = \begin{bmatrix}1-2(y^{2}+z^{2})&2(xy-sz)&2(xz+sy)\\2(xy+sz)&1-2(x^{2}+z^{2})&2(yz-sx)\\2(xz-sy)&2(yz+sx)&1-2(x^{2}+y^{2})\end{bmatrix} $
或另一种形式
$\quad R = \begin{bmatrix} s^2 + x^2 - y^2 -z^2 & 2(xy - sz) & 2(xz + sy) \\ 2(xy +sz) & s^2-x^2+y^2-z^2 & 2(yz - sx) \\ 2(xz-sy) & 2(yz+sx) & s^2-x^2-y^2+z^2 \end{bmatrix}$
OpenCV 中实现的函数 quat2rot() 如下:
// R = quat2rot(q)
// q - 4x1 unit quaternion <qw, qx, qy, qz>
// R - 3x3 rotation matrix
static Mat quat2rot(const Mat& q)
{
CV_Assert(q.type() == CV_64FC1 && q.rows == 4 && q.cols == 1);
double qw = q.at<double>(0,0);
double qx = q.at<double>(1,0);
double qy = q.at<double>(2,0);
double qz = q.at<double>(3,0);
Mat R(3, 3, CV_64FC1);
R.at<double>(0, 0) = 1 - 2*qy*qy - 2*qz*qz;
R.at<double>(0, 1) = 2*qx*qy - 2*qz*qw;
R.at<double>(0, 2) = 2*qx*qz + 2*qy*qw;
R.at<double>(1, 0) = 2*qx*qy + 2*qz*qw;
R.at<double>(1, 1) = 1 - 2*qx*qx - 2*qz*qz;
R.at<double>(1, 2) = 2*qy*qz - 2*qx*qw;
R.at<double>(2, 0) = 2*qx*qz - 2*qy*qw;
R.at<double>(2, 1) = 2*qy*qz + 2*qx*qw;
R.at<double>(2, 2) = 1 - 2*qx*qx - 2*qy*qy;
return R;
}
反之,由旋转矩阵转换为四元数,其实现函数 rot2quat() 如下:
// q = rot2quat(R)
// q - 4x1 unit quaternion <qw, qx, qy, qz>
// R - 3x3 rotation matrix
static Mat rot2quat(const Mat& R)
{
CV_Assert(R.type() == CV_64FC1 && R.rows >= 3 && R.cols >= 3);
double m00 = R.at<double>(0,0), m01 = R.at<double>(0,1), m02 = R.at<double>(0,2);
double m10 = R.at<double>(1,0), m11 = R.at<double>(1,1), m12 = R.at<double>(1,2);
double m20 = R.at<double>(2,0), m21 = R.at<double>(2,1), m22 = R.at<double>(2,2);
double trace = m00 + m11 + m22;
double qw, qx, qy, qz;
if (trace > 0) {
double S = sqrt(trace + 1.0) * 2; // S=4*qw
qw = 0.25 * S;
qx = (m21 - m12) / S;
qy = (m02 - m20) / S;
qz = (m10 - m01) / S;
} else if (m00 > m11 && m00 > m22) {
double S = sqrt(1.0 + m00 - m11 - m22) * 2; // S=4*qx
qw = (m21 - m12) / S;
qx = 0.25 * S;
qy = (m01 + m10) / S;
qz = (m02 + m20) / S;
} else if (m11 > m22) {
double S = sqrt(1.0 + m11 - m00 - m22) * 2; // S=4*qy
qw = (m02 - m20) / S;
qx = (m01 + m10) / S;
qy = 0.25 * S;
qz = (m12 + m21) / S;
} else {
double S = sqrt(1.0 + m22 - m00 - m11) * 2; // S=4*qz
qw = (m10 - m01) / S;
qx = (m02 + m20) / S;
qy = (m12 + m21) / S;
qz = 0.25 * S;
}
return (Mat_<double>(4,1) << qw, qx, qy, qz);
}
备注1 - 欧拉角可视化
一个欧拉角的可视化链接 Euler Angle Visualization Tool,输入欧拉角可实时显示位姿变化
备注2
ceres solver 中,提供了一个 rotation.h 的文件,可以方便的实现欧拉角、旋转矩阵和四元数之间的相互转换,链接如下
参考
《An Invitaton to 3D Vision》 ch2
《Robot Vision》ch13
OpenCV - 3D rigid/afine transforamtion
Rotation Matrix To Euler Angles
An Orge compatible class for euler angles
原文链接: http://www.cnblogs.com/xinxue/
专注于机器视觉、OpenCV、C++ 编程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号