
矩方法应用
最近用到了矩方法对目标检测的结果进行后处理,包括求中心点,偏角和长短轴。基本步骤如下:
- 第一步:将检测到物体的平行框位置作为ROI区域;
- 第二步:对ROI区域进行预处理(灰度化、二值化);
- 第三步:利用矩方法求出物体的矩(OPENCV::moments);
- 第四步:利用矩分别计算中心点,偏角和长短轴。
理论部分可以参考这篇博客。
一、求中心点
单通道图像的矩的面积为:
$$M_{00} = \sum_{i} \sum_{j}V(i, j)$$
其中\(V(i, j)\)表示单通道图像在点\((i, j)\)上的灰度值,一阶矩定义为:
$$M_{10}=\sum_{i}\sum_ {j}i\cdot V(i,j)$$
$$M_{01}=\sum_{i}\sum_ {j}j\cdot V(i,j)$$
通过一阶矩求出物体重心位置:
$$x_c = \frac{M_{10}}{M_{00}}$$
$$y_c = \frac{M_{01}}{M_{00}}$$
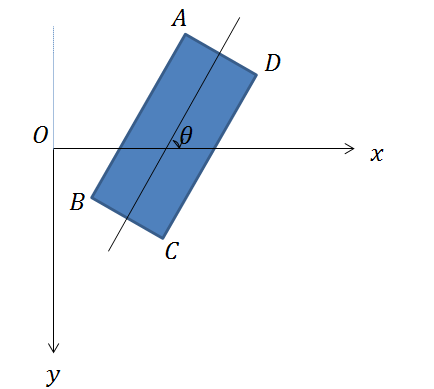
二、求偏角
物体的二阶矩定义为:
\[M_{20} = \sum_{i} \sum_{j} i^2 \cdot V(i,j)
\]
\[M_{02} = \sum_{i} \sum_{j} j^2 \cdot V(i,j)
\]
\[M_{11} = \sum_{i} \sum_{j} i\cdot j \cdot V(i,j)
\]
通过二阶矩计算偏转角度:
\[\theta = \frac{1}{2}atan2 \frac{2b}{a-c}
\]
其中\(a = \frac{M_{20}}{M_{00}}-{x_c}^2\),\(b = \frac{M_{11}}{M_{00}}-x_c\cdot y_c\),\(c = \frac{M_{11}}{M_{00}}-{y_c}^2\)。
求出的角度为\(x\)轴正方向与物体长轴所形成的角度,其范围为\([-90^o, 90^o]\),\(x\)轴正向的逆时针方向为负,顺时针为正。
三、求长短轴
长半轴\(r_1\)和短半轴\(r_2\)定义为:
\[r_1 = \sqrt{2(M_{20}+M_{02}+\sqrt{(M_{20}-M_{02})^2 + 4{M_{11}}^2})}
\]
\[r_2 = \sqrt{2(M_{20}+M_{02}-\sqrt{(M_{20}-M_{02})^2 + 4{M_{11}}^2})}
\]
根据长短轴和中心点及偏角可以求出包含物体的斜框区域。
四、结果展示
红色点表示物体中心,黄色框是通过中心点、偏角和长短轴计算出四个顶点后画出来的。

五、代码
std::vector< std::vector< cv::Point> > contours;
std::vector<cv::Vec4i> hierarchy;
cv::findContours(cvImg, contours, hierarchy, cv::RETR_CCOMP, cv::CHAIN_APPROX_SIMPLE);
if (contours.size() > 0) {
std::vector< cv::Point>cnt = contours[0];
for (int i = 1; i < contours.size(); ++i) {
if (contours[i].size() > cnt.size()) {
cnt = contours[i];
}
}
cv::Moments mu = cv::moments(cnt);
cv::Point2f center = cv::Point2f(static_cast<float>(mu.m10 / mu.m00), static_cast<float>(mu.m01 / mu.m00));
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号