
【Vrep研究日记】----碰撞检测器碰撞许可设定
今天遇到了一个问题,我在每次进行轨迹规划的时候我的Planner一直在报警,报警提示如下
[simExtOMPL:warning] OMPL: D:\coppeliaRobotics\programming\simExtOMPL\build\ompl-1.5.0-prefix\src\ompl-1.5.0\src\ompl\base\src\Planner.cpp:322: PRMstar: Skipping invalid goal state (invalid bounds)
[simExtOMPL:error] OMPL: D:\coppeliaRobotics\programming\simExtOMPL\build\ompl-1.5.0-prefix\src\ompl-1.5.0\src\ompl\geometric\planners\prm\src\PRM.cpp:482: PRMstar: Unable to find any valid goal states

这个报警是在我将夹具添加到了机械臂末端法兰的时候发生的。
在使用Vrep 的时候我们经常会需要用到自己设计的非标夹具来进行一些运动规划,之前在没有学习轨迹规划的时候只是通过自己写的一个模型控制器进行关节驱动,只是通过肉眼和进行查看哈哈(内心一阵无力,小白入门软件很痛苦,经常会搞出一些摸不着头脑的做法=_=),没有使用到仿真中的碰撞检测器所以没有发现该问题。
这个问题我是如何解决的呢?
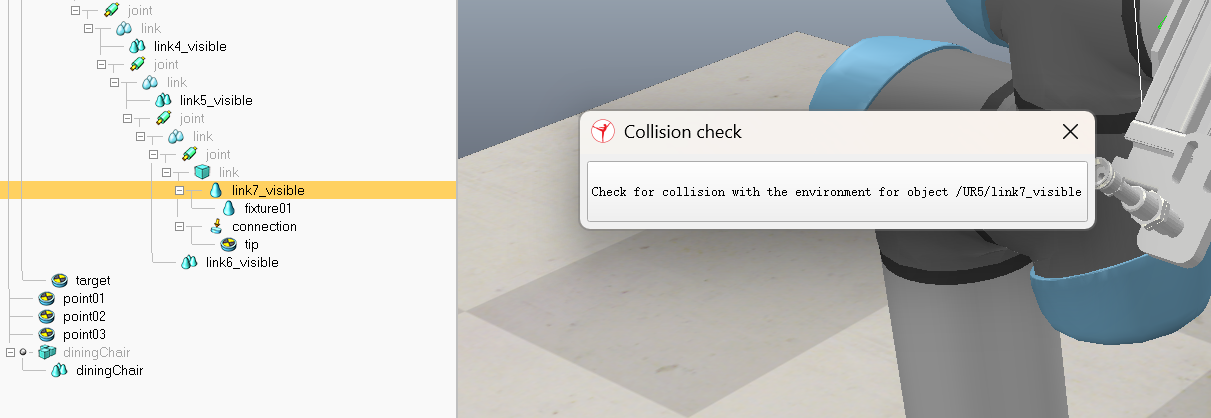
首先我们先打开【菜单栏中的"Modules" ————> 选择“Collision check” 】,此时会出现一个工具的对话框,这时候我们点击我们的夹具(这里我的夹具是“fixture01”)
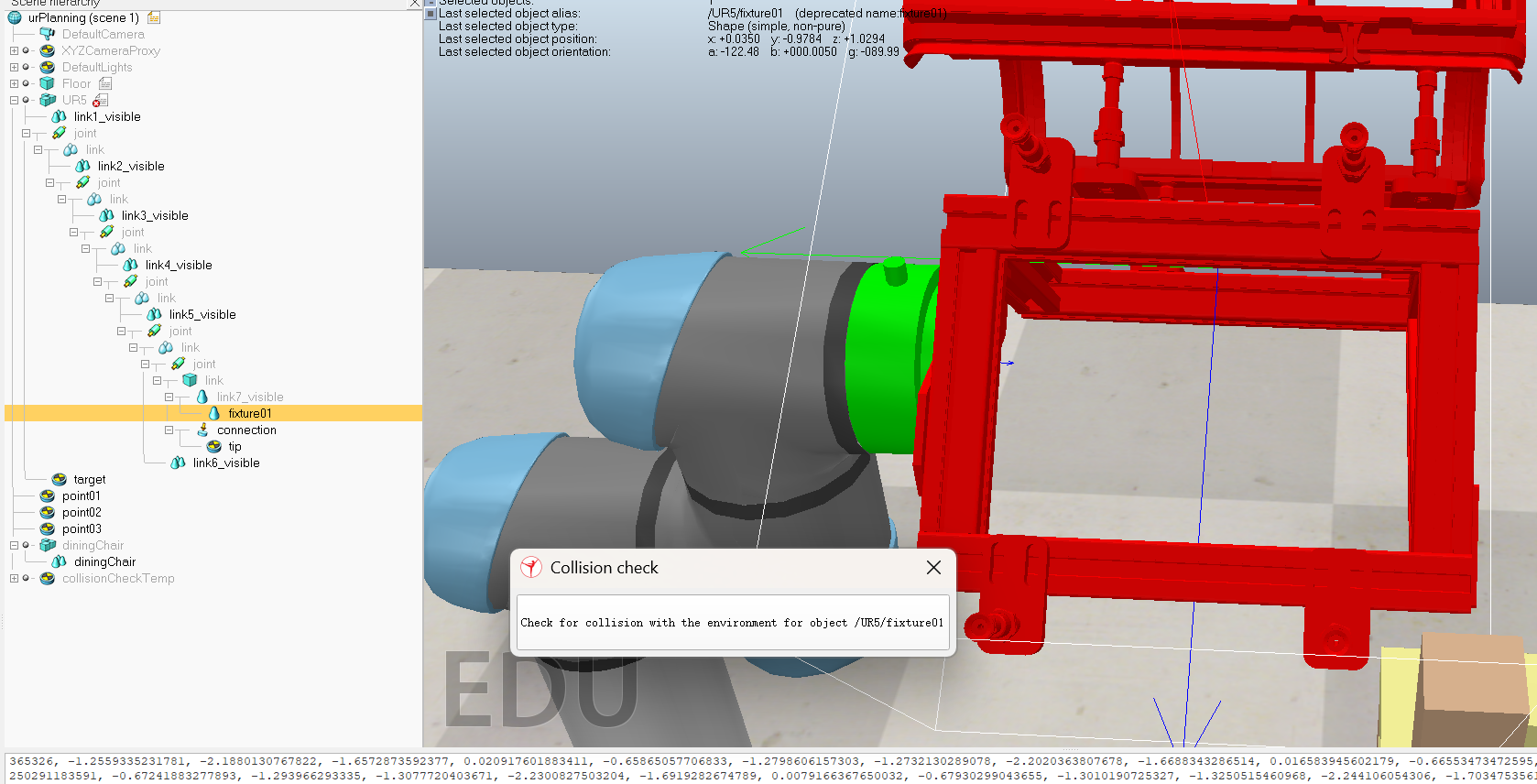
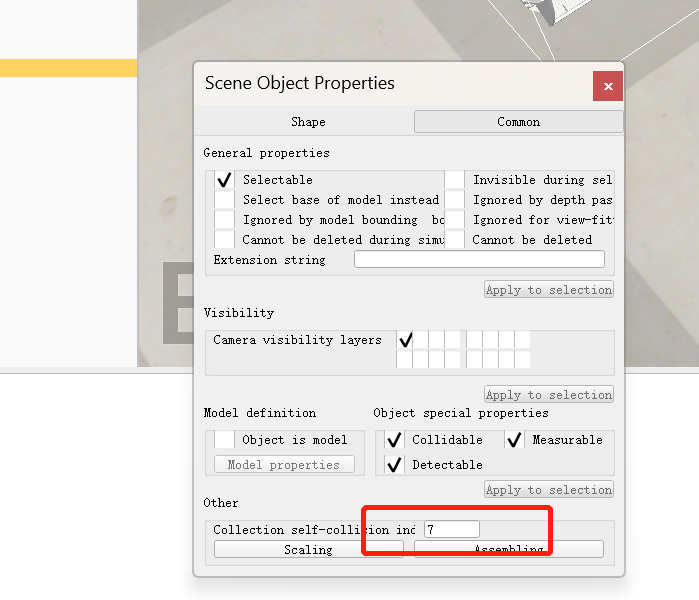
选择好夹具后点击对话框的按钮,碰撞检测器就会进行检查。这个时候我们就会看到夹具和末端法兰之间干涉了,这时候双击夹具,在弹出的对话框中,我们切换到Common标签。将collection self-collision indicato设置成父类这个位置的参数+1。
再点击检查碰撞就没有报警了,问题解决。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号