步进电机在1200上的使用
配置轴
- 步进主要控制的是脉冲和方向。配置1200端,用MC指令,先配置轴的常规和驱动器。
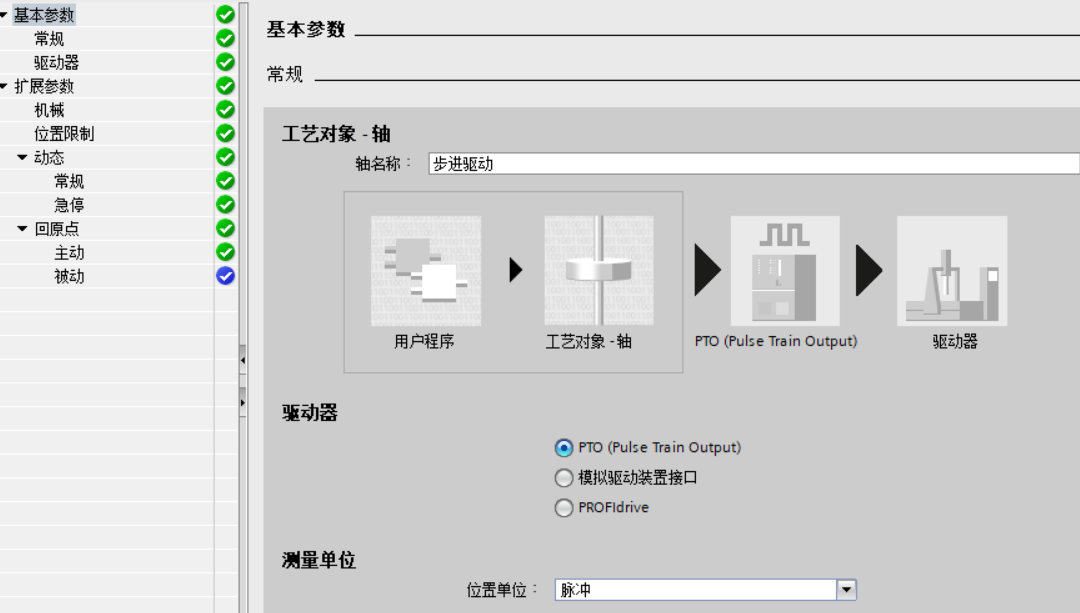

此处若不填“使能输出”,可以在程序管脚填写。
步进电机的方向和脉冲输出点,如果是1200PLC,必须用PLC本体上的Q点。
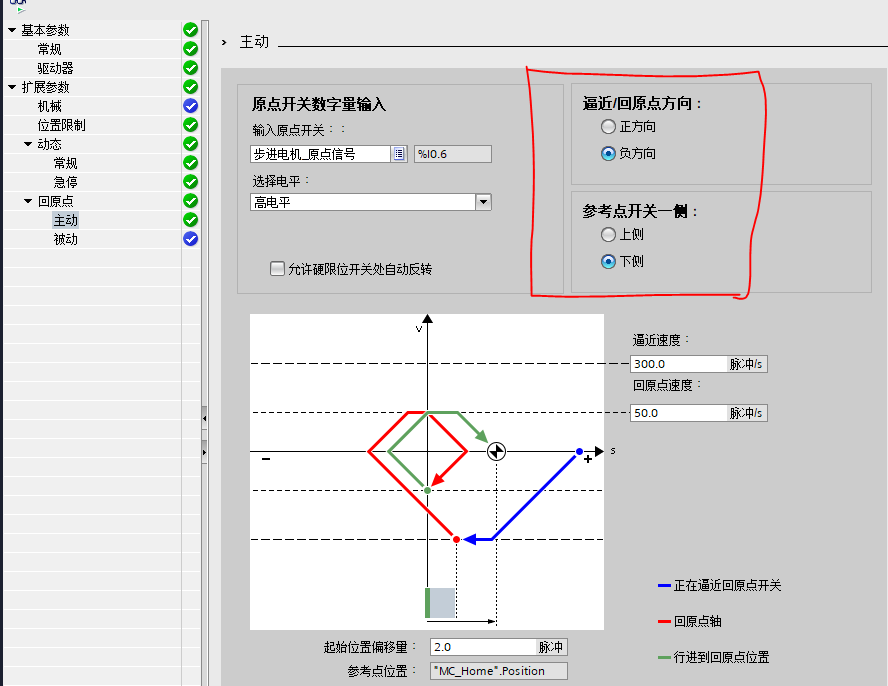
步进主动回原点,参考点上下侧和回原点方向要一致,不然原点开关得电后,回反方向转动到零位置。
- 细分是定义一圈的脉冲数,在规定范围内细分越大,精度越高。
- 设置完驱动器参数,需要断电重启。
- 步进定位识别上升沿控制。
写指令
- 固化的FB如下,一些外围的变量作为配合HMI和控制模式使用;FB需使用还需要调用并填写接口
REGION 逻辑处理
// 手动
#"Jog+Hand" := #In_Mode.ManualMode AND #"In_Jog+Condition" AND #H_Collection.ButtonAndStatus."Jog+Hand";
#"Jog-Hand" := #In_Mode.ManualMode AND #"In_Jog-Condition" AND #H_Collection.ButtonAndStatus."Jog-Hand";
//自动
#"Jog+Auto" := #In_Mode.AutoMode AND #"In_Jog+Condition" AND #"In_JogAuto+Condition" AND #"In_Jog+AutoStart";
#"Jog-Auto" := #In_Mode.AutoMode AND #"In_Jog-Condition" AND #"In_JogAuto-Condition" AND #"In_Jog-AutoStart";
//Home
#JogHome := #In_Mode.ManualMode AND #In_HomeCondition AND (#H_Collection.ButtonAndStatus.Step_Home OR #In_Mode.HomeMode);
END_REGION
REGION 速度处理
// JOG速度:
IF #"Jog+Hand" OR #"Jog-Hand" OR #JogHome THEN
#Velocity := #H_Collection.ButtonAndStatus.InputValue_JogVel;
ELSIF #"Jog+Auto" OR #"Jog-Auto" THEN
#Velocity := #H_Collection.ButtonAndStatus.InputValue_Set_AbsVel;
ELSE
#Velocity := 0;
END_IF;
END_REGION
REGION 步进电机
// Statement section REGION
//**************************步进使能****************************
#MC_Power_Instance(Axis := #In_Axis,
Enable := #In_Enable,
StartMode := #In_MC_Power_StartMode,
StopMode := #In_MC_Power_StopMode,
Status => #Out_Step_Enable.Status,
Busy => #Out_Step_Enable.Busy,
Error => #Out_Step_Enable.Error,
ErrorID => #Out_Step_Enable.ErrorID,
ErrorInfo => #Out_Step_Enable.ErrorInfo);
//***************************步进复位****************************
#MC_Reset_Instance(Axis := #In_Axis,
Execute := #In_Mode.Reset,
Restart := #In_MC_Reset_Restart,
Done => #Out_Step_Reset.Done,
Busy => #Out_Step_Reset.Busy,
Error => #Out_Step_Reset.Error,
ErrorID => #Out_Step_Reset.ErrorID,
ErrorInfo => #Out_Step_Reset.ErrorInfo);
//*****************************步进回原点**************************
#MC_Home_Instance(Axis := #In_Axis,
Execute := #JogHome,
Position := #In_MC_Home_Position,
Mode := #In_MC_Home_Mode,
Done => #Out_Home.Done,
Busy => #Out_Home.Busy,
CommandAborted => #Out_Home.CommandAborted,
Error => #Out_Home.Error,
ErrorID => #Out_Home.ErrorID,
ErrorInfo => #Out_Home.ErrorInfo,
ReferenceMarkPosition => #Out_Home.ReferenceMarkPosition);
//*****************************步进JOG*******************************
#MC_MoveJog_Instance(Axis := #In_Axis,
JogForward := (#"Jog+Hand" OR #"Jog+Auto"),
JogBackward := (#"Jog-Hand" OR #"Jog-Auto"),
Velocity := #Velocity,
PositionControlled := #In_MC_MoveJog_PositionControlled,
InVelocity => #Out_JOG.inVelocity,
Busy => #Out_JOG.Busy,
CommandAborted => #Out_JOG.CommandAborted,
Error => #Out_JOG.Error,
ErrorID => #Out_JOG.ErrorID,
ErrorInfo => #Out_JOG.ErrorInfo);
//***************************步进绝对定位***************************
#MC_MoveAbsolute_Instance(Axis := #In_Axis,
Execute := #In_MC_MoveAbsolute_Excute,
Position := #H_Collection.ButtonAndStatus.InputValue_Set_AbsPosition,
Velocity := #Velocity,
Direction := #In_MC_MoveAbsolute_Direction,
Done => #Out_Absolute.Done,
Busy => #Out_Absolute.Busy,
CommandAborted => #Out_Absolute.CommandAborted,
Error => #Out_Absolute.Error,
ErrorID => #Out_Absolute.ErrorID,
ErrorInfo => #Out_Absolute.ErrorInfo);
//***************************暂停轴***********************************
#MC_Halt_Instance(Axis := #In_Axis,
Execute := #In_Enable,
Done => #Out_Halt.Done,
Busy => #Out_Halt.Busy,
CommandAborted => #Out_Halt.CommandAborted,
Error => #Out_Halt.Error,
ErrorID => #Out_Halt.ErrorID,
ErrorInfo => #Out_Halt.ErrorInfo);
END_REGION
//*****************************反馈*******************************
REGION 反馈
#Out_ActualVelocity := #In_Axis.ActualVelocity;
#Out_ActualPosition := #In_Axis.ActualPosition;
END_REGION
//**********************************报警**************************
IF #In_StepAlarm THEN
#Out_Alarm := TRUE;
ELSIF NOT #In_StepAlarm AND #In_Mode.Reset THEN
#Out_Alarm := FALSE;
END_IF;
//**********************************HMI Collection**************************
//输出
#H_Collection.Step_Enable := #Out_Step_Enable;
#H_Collection.Step_Reset := #Out_Step_Reset;
#H_Collection.Home := #Out_Home;
#H_Collection.JOG := #Out_JOG;
#H_Collection.Absolute := #Out_Absolute;
#H_Collection.Halt := #Out_Halt;
#H_Collection.ButtonAndStatus.ActualVelocity := #In_Axis.ActualVelocity;
#H_Collection.ButtonAndStatus.ActualPosition := #In_Axis.ActualPosition;
-
注意1:MC_POWER要一直调用才行,并保证该指令在MOTION CONTROL指令前面调用:
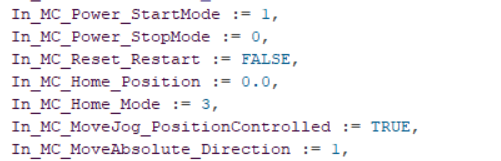
- StartMode=0 : 启用位置不受控的定位轴
- StartMode=1 : 启用位置受控的定位轴
- StopMode=0 : 紧急停止, 轴将以组态的急停减速度进行制动
- StopMode=1 : 立即停止,PLC会立即停止发脉冲
- StopMode=2 : 带有加速度变化率控制的紧急停止,如果激活了加速度变化率控制,会将已组态的加速度变化率考虑在内,减速曲线变得平滑。
-
注意2:停止轴:
- 方法1:上升沿触发运动后,是不会停下来的。把速度写0,再触发一下上升沿指令。就可以停下来了。
- 方法2:使用MC_Halt停止轴指令。注意一点,停止轴,可以用MC-Halt,但是用完它,必须复位MC-Reset才可以再用。
-
本案例在实际调用时部分接口使用情况参考:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号