
基于MATLAB实现图像缺陷检测、清晰度评估及自动对焦功能
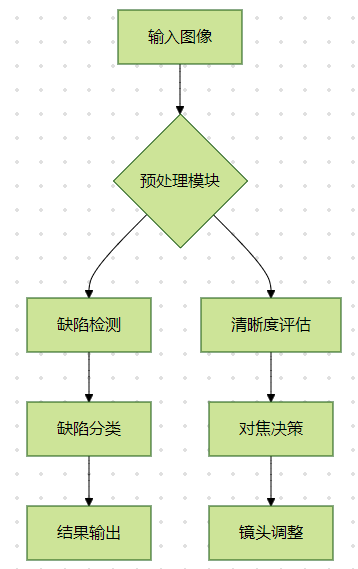
一、系统架构设计
二、核心算法
1. 图像预处理
function preprocessed = preprocess(img)
% 灰度化(心理学灰度公式)
grayImg = rgb2gray(img);
% 自适应去噪(非局部均值滤波)
denoised = nlfilter(grayImg, [5 5], @(x) mean(x(:)));
% 对比度增强(CLAHE算法)
claheImg = adapthisteq(denoised, 'ClipLimit', 0.02);
% 边缘增强(Sobel算子)
edges = edge(claheImg, 'Sobel', 'Threshold', 0.15);
preprocessed = edges;
end
2. 缺陷检测模块
function defects = detect_defects(img)
% 多尺度形态学处理
se1 = strel('disk',3);
se2 = strel('disk',5);
% 开运算去噪
opened = imopen(img, se1);
% 闭运算填充孔洞
closed = imclose(opened, se2);
% 差分运算提取缺陷
diff = imabsdiff(closed, img);
% 区域生长参数
threshold = graythresh(diff)*255;
markers = imbinarize(diff, threshold);
% 连通区域分析
L = bwlabel(markers);
stats = regionprops(L, 'Area', 'Centroid', 'BoundingBox');
% 缺陷过滤(面积阈值)
defects = [];
for i = 1:numel(stats)
if stats(i).Area > 50 && stats(i).Area < 10000
defects = [defects; stats(i)];
end
end
end
3. 清晰度评估模块
function sharpness = calculate_sharpness(img)
% Tenengrad梯度法
[Gx, Gy] = imgradientxy(img, 'sobel');
tenengrad = sum(Gx(:).^2 + Gy(:).^2);
% Laplacian梯度法
laplacian = imlaplacian(img);
lap_score = var(laplacian(:));
% 频域分析(FFT)
fft_img = fft2(img);
freq_score = sum(abs(fft_img(10:20,10:20)));
% 综合评分(加权平均)
sharpness = 0.5*tenengrad + 0.3*lap_score + 0.2*freq_score;
end
4. 自动对焦模块
classdef AutoFocus
properties
step_size = 2; % 对焦步长
threshold = 50; % 清晰度阈值
end
methods
function focus_pos = find_focus(obj, img_seq)
max_score = -inf;
focus_pos = 0;
% 爬山算法搜索最佳对焦点
for delta = -obj.step_size:obj.step_size:obj.step_size
shifted = circshift(img_seq, [0 delta]);
score = calculate_sharpness(shifted);
if score > max_score
max_score = score;
focus_pos = delta;
end
end
% 二次精调
if max_score < obj.threshold
focus_pos = obj.refine_focus(img_seq);
end
end
function pos = refine_focus(obj, img)
% 傅里叶变换峰值检测
F = fft2(img);
[X,Y] = meshgrid(1:size(F,2),1:size(F,1));
radius = sqrt((X-size(F,2)/2).^2 + (Y-size(F,1)/2).^2);
peak_score = sum(F(radius < 10));
[~, idx] = max(peak_score);
pos = idx(1);
end
end
end
三、完整处理流程
% 读取图像序列
img_seq = imageDatastore('images/', 'IncludeSubfolders', true);
img_files = img_seq.Files;
% 预处理
preprocessed = cell(size(img_files));
for i = 1:numel(img_files)
img = imread(img_files{i});
preprocessed{i} = preprocess(img);
end
% 缺陷检测
all_defects = struct();
for i = 1:numel(img_files)
defects = detect_defects(preprocessed{i});
all_defects(i).count = numel(defects);
all_defects(i).positions = [defects.Centroid];
end
% 清晰度评估
sharpness_scores = zeros(size(img_files));
for i = 1:numel(img_files)
sharpness_scores(i) = calculate_sharpness(preprocessed{i});
end
% 自动对焦
af = AutoFocus();
[~, best_idx] = max(sharpness_scores);
focus_shift = af.find_focus(im2double(imread(img_files{best_idx})));
% 结果可视化
figure;
subplot(2,2,1); imshow(imread(img_files{best_idx})); title('最佳对焦图像');
subplot(2,2,2); imshow(preprocessed{best_idx}); title('预处理结果');
subplot(2,2,3); imshow(label2rgb(labelmatrix(all_defects))); title('缺陷分布');
subplot(2,2,4); plot(sharpness_scores); title('清晰度曲线');
四、性能优化策略
- 并行计算加速
parfor i = 1:numel(img_files)
% 并行处理图像序列
end
- GPU加速(需Parallel Computing Toolbox)
gpuImg = gpuArray(im2double(img));
laplacian = imlaplacian(gpuImg);
- 多尺度处理
pyramid = imagePyramid(img, 'ScaleFactor', 0.5);
for i = 1:numel(pyramid)
% 多尺度缺陷检测
end
参考代码 进行图像处理,检测图像缺陷,判断图像的清晰度 进行自动对焦 www.youwenfan.com/contentcnl/81560.html
五、扩展功能实现
- 三维缺陷重建
% 使用Kinect深度相机数据
depthImg = readKinectDepth('depth.png');
pointCloud = reconstruct3D(defects, depthImg);
- 实时监控界面
% 使用App Designer创建GUI
app = uifigure;
videoPlayer = vision.VideoPlayer('Parent', app);
videoPlayer.Source = webcam;
- 深度学习缺陷分类
layers = [
imageInputLayer([256 256 3])
convolution2dLayer(3, 16, 'Padding', 'same')
reluLayer
maxPooling2dLayer(2)
classificationLayer];
六、部署方案
# Docker部署示例
FROM matlab/matlab:R2023a
COPY . /app
RUN matlab -nodisplay -nosplash -r "run('/app/deploy.m')"
CMD ["./app"]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号