
随笔分类 - 运动规划
摘要:选择矩阵 \(C^T\) 的构造细节 假设有三段轨迹,并且最小化 snap,具体构造细节如下:
阅读全文
摘要:Dijkstra And A* 1.0 引出 $\quad$ 首先,在一个实际上的最短路问题中,从图中一个节点到达另外一个邻居节点是有 Cost 这一说的,这个 Cost 可以是我们平常所说的 Length、Time、Energy. etc. $\quad$ 当所有的权重(Cost)都为 $1$ 的
阅读全文
摘要:BVP问题 常见的 BVP 问题通常具有如下特点 BVP是状态栅格采样算法(state sampled lattice planning)的基础。 没有通用的解,一般都是 case by case 的设计。 通常是一个复杂的数值优化问题。 Example 设计一个满足无人机动力学约束的轨迹 $x(t
阅读全文
摘要: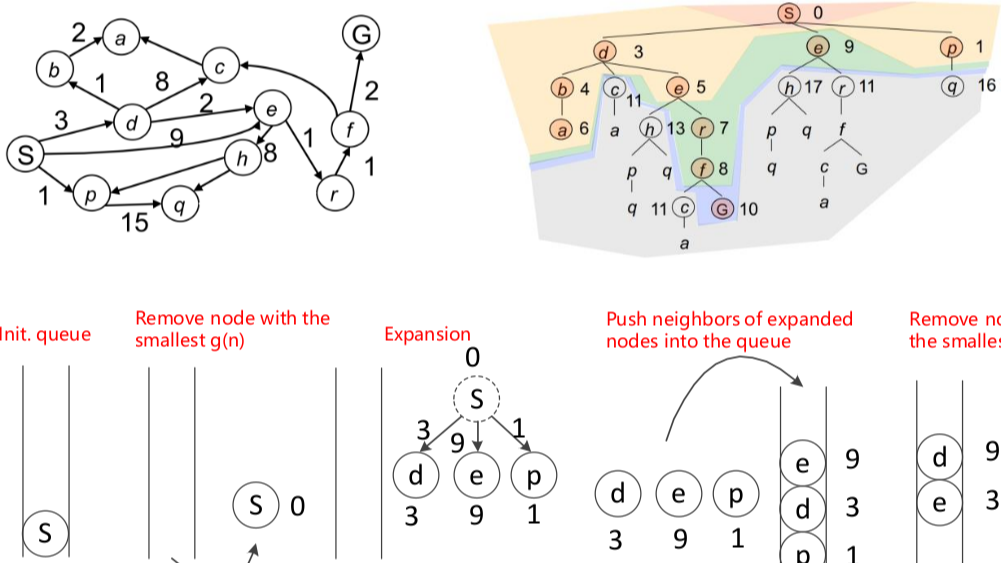 基于图搜索的路径规划方法基础概念,介绍了配置空间,工作空间等相关概念,引出了深度优先搜索和广度优先搜索并进行了对比。
阅读全文
基于图搜索的路径规划方法基础概念,介绍了配置空间,工作空间等相关概念,引出了深度优先搜索和广度优先搜索并进行了对比。
阅读全文
基于图搜索的路径规划方法基础概念,介绍了配置空间,工作空间等相关概念,引出了深度优先搜索和广度优先搜索并进行了对比。
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号