Fer2013 表情识别 pytorch (CNN、VGG、Resnet)
fer2013数据集
数据集介绍
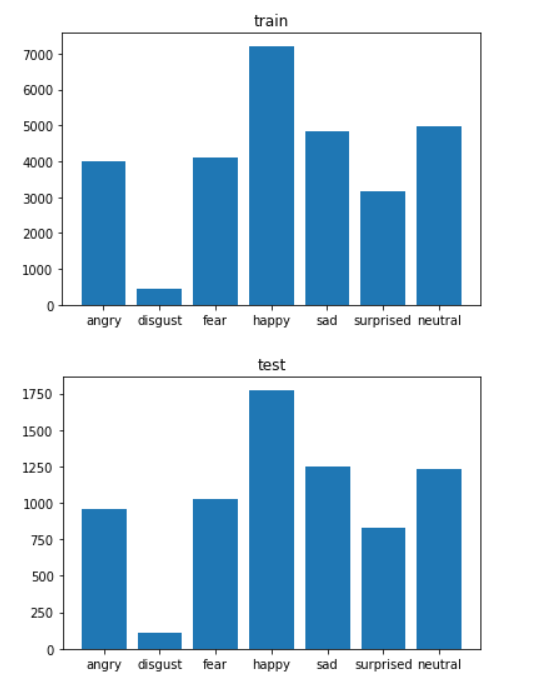
- Fer2013人脸表情数据集由35886张人脸表情图片组成,其中,测试图(Training)28708张,公共验证图(PublicTest)和私有验证图(PrivateTest)各3589张,每张图片是由大小固定为48×48的灰度图像组成,共有7种表情,分别对应于数字标签0-6,具体表情对应的标签和中英文如下:0 anger 生气; 1 disgust 厌恶; 2 fear 恐惧; 3 happy 开心; 4 sad 伤心;5 surprised 惊讶; 6 normal 中性。

数据整理
- 数据给的是一个csv文件,其中的表情数据并没有直接给图片,而是给了像素值,没关系,整理的时候顺便转换成图片就好

- 将数据分类顺便转换成图片,这里直接分成训练集和验证集两个文件夹。
import numpy as np import pandas as pd from PIL import Image import os train_path = './data/train/' vaild_path = './data/vaild/' data_path = './icml_face_data.csv' def make_dir(): for i in range(0,7): p1 = os.path.join(train_path,str(i)) p2 = os.path.join(vaild_path,str(i)) if not os.path.exists(p1): os.makedirs(p1) if not os.path.exists(p2): os.makedirs(p2) def save_images(): df = pd.read_csv(data_path) t_i = [1 for i in range(0,7)] v_i = [1 for i in range(0,7)] for index in range(len(df)): emotion = df.loc[index][0] usage = df.loc[index][1] image = df.loc[index][2] data_array = list(map(float, image.split())) data_array = np.asarray(data_array) image = data_array.reshape(48, 48) im = Image.fromarray(image).convert('L')#8位黑白图片 if(usage=='Training'): t_p = os.path.join(train_path,str(emotion),'{}.jpg'.format(t_i[emotion])) im.save(t_p) t_i[emotion] += 1 #print(t_p) else: v_p = os.path.join(vaild_path,str(emotion),'{}.jpg'.format(v_i[emotion])) im.save(v_p) v_i[emotion] += 1 #print(v_p) make_dir() save_images()
简单分析
- 整理好后看一下数据的分布情况,我们可以看到厌恶表情的数据特别少,其他表情尚可。
数据预处理
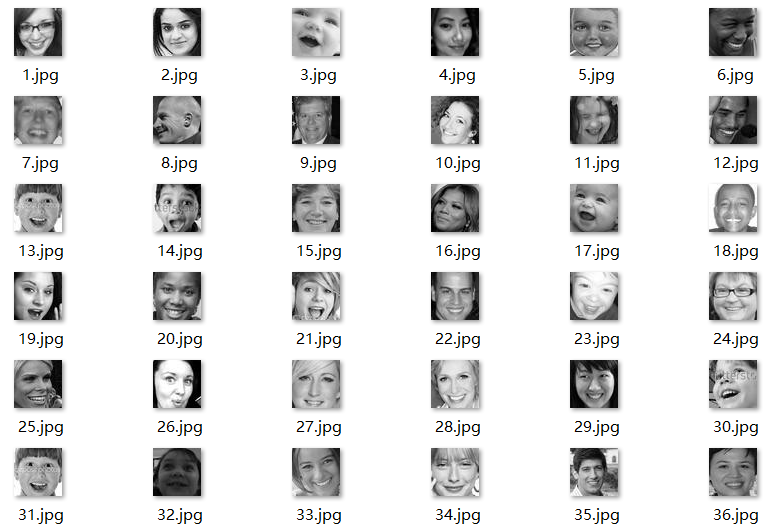
- 我们可以对这些灰度图片做一点数据增强
path_train = './data/train/' path_vaild = './data/vaild/' transforms_train = transforms.Compose([ transforms.Grayscale(),#使用ImageFolder默认扩展为三通道,重新变回去就行 transforms.RandomHorizontalFlip(),#随机翻转 transforms.ColorJitter(brightness=0.5, contrast=0.5),#随机调整亮度和对比度 transforms.ToTensor() ]) transforms_vaild = transforms.Compose([ transforms.Grayscale(), transforms.ToTensor() ]) data_train = torchvision.datasets.ImageFolder(root=path_train,transform=transforms_train) data_vaild = torchvision.datasets.ImageFolder(root=path_vaild,transform=transforms_vaild) train_set = torch.utils.data.DataLoader(dataset=data_train,batch_size=BATCH_SIZE,shuffle=True) vaild_set = torch.utils.data.DataLoader(dataset=data_vaild,batch_size=BATCH_SIZE,shuffle=False) - 看一下效果
for i in range(1,16+1): plt.subplot(4,4,i) plt.imshow(data_train[0][0],cmap='Greys_r') plt.axis('off') plt.show()
CNN
模型搭建
- 使用nn.Sequential快速搭建模型
CNN = nn.Sequential( nn.Conv2d(1,64,3), nn.ReLU(True), nn.MaxPool2d(2,2), nn.Conv2d(64,256,3), nn.ReLU(True), nn.MaxPool2d(3,3), Reshape(),# 两个卷积和池化后,tensor形状为(batchsize,256,7,7) nn.Linear(256*7*7,4096), nn.ReLU(True), nn.Linear(4096,1024), nn.ReLU(True), nn.Linear(1024,7) ) - 其中自己实现Reshape,将tensor打平以送入全连接层
class Reshape(nn.Module): def __init__(self, *args): super(Reshape, self).__init__() def forward(self, x): return x.view(x.shape[0],-1)
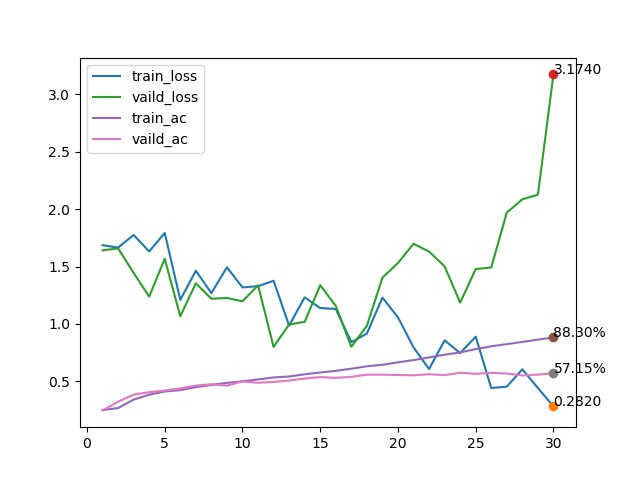
训练效果
- 显然,在第17个epoch的时候验证集准确率就到了瓶颈
VGG
模型搭建
-
def vgg_block(num_convs, in_channels, out_channels): blk = [] for i in range(num_convs): if i == 0: blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)) else: blk.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)) blk.append(nn.ReLU()) blk.append(nn.MaxPool2d(kernel_size=2, stride=2)) # 这里会使宽高减半 return nn.Sequential(*blk) def vgg(conv_arch, fc_features, fc_hidden_units): net = nn.Sequential() # 卷积层部分 for i, (num_convs, in_channels, out_channels) in enumerate(conv_arch): # 每经过一个vgg_block都会使宽高减半 net.add_module("vgg_block_" + str(i+1), vgg_block(num_convs, in_channels, out_channels)) # 全连接层部分 net.add_module("fc", nn.Sequential( Reshape(), nn.Linear(fc_features, fc_hidden_units), nn.ReLU(), nn.Dropout(0.5), nn.Linear(fc_hidden_units, fc_hidden_units), nn.ReLU(), nn.Dropout(0.5), nn.Linear(fc_hidden_units, 7) )) return net conv_arch = ((1, 3, 32), (1, 32, 64), (2, 64, 128)) # 经过5个vgg_block, 宽高会减半5次, 变成 224/32 = 7 fc_features = 128 * 6* 6 # c * w * h fc_hidden_units = 1024 model = vgg(conv_arch, fc_features, fc_hidden_units)
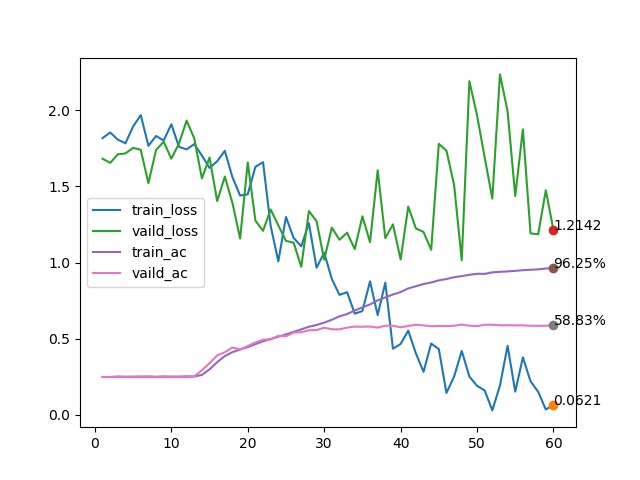
训练效果
- 先训练了30个epoch

- vgg的优点在于能使用相同的模块快速加深网络,更深的网络可能会带来更好的学习效果,我们可以增加训练次数来观察曲线
Resnet
模型搭建
-
class Residual(nn.Module): def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1): super(Residual, self).__init__() self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride) self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1) if use_1x1conv: self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride) else: self.conv3 = None self.bn1 = nn.BatchNorm2d(out_channels) self.bn2 = nn.BatchNorm2d(out_channels) def forward(self, X): Y = F.relu(self.bn1(self.conv1(X))) Y = self.bn2(self.conv2(Y)) if self.conv3: X = self.conv3(X) return F.relu(Y + X) def resnet_block(in_channels, out_channels, num_residuals, first_block=False): if first_block: assert in_channels == out_channels # 第一个模块的通道数同输入通道数一致 blk = [] for i in range(num_residuals): if i == 0 and not first_block: blk.append(Residual(in_channels, out_channels, use_1x1conv=True, stride=2)) else: blk.append(Residual(out_channels, out_channels)) return nn.Sequential(*blk) class GlobalAvgPool2d(nn.Module): # 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现 def __init__(self): super(GlobalAvgPool2d, self).__init__() def forward(self, x): return F.avg_pool2d(x, kernel_size=x.size()[2:]) net = nn.Sequential( nn.Conv2d(3, 64, kernel_size=7 , stride=2, padding=3), nn.BatchNorm2d(64), nn.ReLU(), nn.MaxPool2d(kernel_size=3, stride=2, padding=1)) net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True)) net.add_module("resnet_block2", resnet_block(64, 128, 2)) net.add_module("resnet_block3", resnet_block(128, 256, 2)) net.add_module("resnet_block4", resnet_block(256, 512, 2)) net.add_module("global_avg_pool", GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1) net.add_module("fc", nn.Sequential(Reshape(), nn.Linear(512, 7)))
训练效果
-
让我们看看残差块的设计给我们带来……
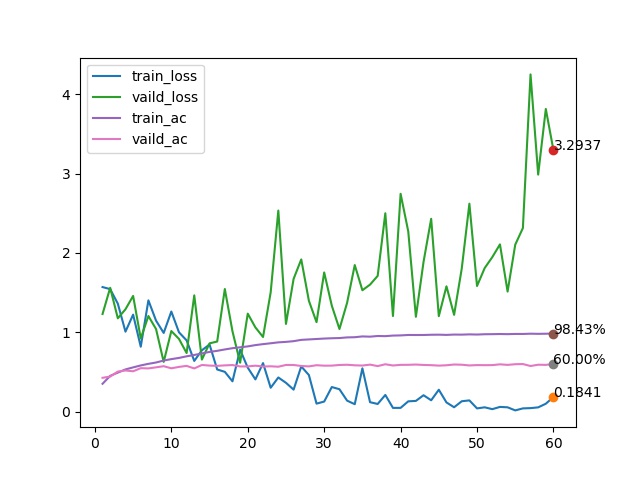
-
带来了更好的过拟合效果(逃
总结
-
事已至此,我们浏览一下混淆矩阵
- 0-angry
- 1-disgust
- 2-fear
- 3-happy
- 4-sad
- 5-surprised
- 6-neutral
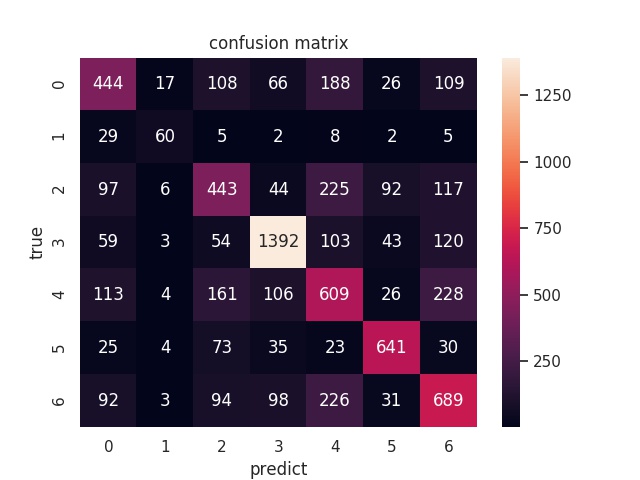
-
貌似除了开心和惊喜,其他表情准确率都挺一言难尽的,可能这两个比较好认,笑了就是开心,O型嘴就是惊喜,其他表情别说机器,人都不一定认得出


 浙公网安备 33010602011771号
浙公网安备 33010602011771号