TIM--不进中断捕获PWM
定时器具有输入捕获的功能,常用方法是使能定时器输入捕获中断,当上升/下降沿来临时,触发中断,进而进中断
读取到比较捕获值,但该办法有个限制,需要CPU参与处理,同时如果中断过多的话,可能还会有中断打断的问题。所
以可以采用更高效的办法,那就是用DMA来处理,具体处理思路就是利用捕获的这一DMA触发源,当捕获成功发生后触
发DMA搬运数据捕获寄存器里的数据至buff中。
配置:
1,TIM基础配置(参考EVT中输入捕获例程实现,如若部分配置不理解,参考此链接:https://www.cnblogs.com/wchmcu/p/17798582.html):
void Input_Capture_Init( u16 arr, u16 psc ) { GPIO_InitTypeDef GPIO_InitStructure={0}; TIM_ICInitTypeDef TIM_ICInitStructure={0}; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0}; NVIC_InitTypeDef NVIC_InitStructure={0}; RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init( GPIOA, &GPIO_InitStructure); GPIO_ResetBits( GPIOA, GPIO_Pin_8 ); TIM_TimeBaseInitStructure.TIM_Period = arr; TIM_TimeBaseInitStructure.TIM_Prescaler = psc; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00; TIM_TimeBaseInit( TIM1, &TIM_TimeBaseInitStructure); TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; TIM_ICInitStructure.TIM_ICFilter = 0x00; TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; TIM_PWMIConfig( TIM1, &TIM_ICInitStructure ); NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); TIM_SelectInputTrigger( TIM1, TIM_TS_TI1FP1 ); TIM_SelectSlaveMode( TIM1, TIM_SlaveMode_Reset ); TIM_SelectMasterSlaveMode( TIM1, TIM_MasterSlaveMode_Enable ); }
2,DMA配置(主要配置就是数据来源于外设,循环模式等):
void TIM1_DMA_Init(DMA_Channel_TypeDef *DMA_CHx, u32 ppadr, u32 memadr, u16 bufsize) { DMA_InitTypeDef DMA_InitStructure = {0}; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); DMA_DeInit(DMA_CHx); DMA_InitStructure.DMA_PeripheralBaseAddr = ppadr; DMA_InitStructure.DMA_MemoryBaseAddr = memadr; DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; DMA_InitStructure.DMA_BufferSize = bufsize; DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable; DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh; DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; DMA_Init(DMA_CHx, &DMA_InitStructure); DMA_Cmd(DMA_CHx, ENABLE); }
比较捕获寄存器的地址
#define TIM1_CH1CVR_ADDRESS 0x40012C34 #define TIM1_CH2CVR_ADDRESS 0x40012C38
3,main中参数配置(500ms打印一次buff中的值,buff0中是PWM周期,buff1中是占空比)
u16 pbuf[2] = {0}; int main(void) { USART_Printf_Init(115200); SystemCoreClockUpdate(); Delay_Init(); printf("SystemClk:%d\r\n",SystemCoreClock); printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() ); Input_Capture_Init( 0xFFFF, 96-1 ); TIM1_DMA_Init(DMA1_Channel2, (u32)TIM1_CH1CVR_ADDRESS, (u32)pbuf, 1); TIM1_DMA_Init(DMA1_Channel3, (u32)TIM1_CH2CVR_ADDRESS, (u32)(pbuf+1), 1); TIM_DMACmd(TIM1, TIM_DMA_CC1, ENABLE); TIM_DMACmd(TIM1, TIM_DMA_CC2, ENABLE); TIM_Cmd( TIM1, ENABLE ); while(1){ printf("CH1: %d\r\n",pbuf[0]); printf("CH2: %d\r\n",pbuf[1]); Delay_Ms(500); } }
测试结果(输入占空比75%,周期10K hz的方波):
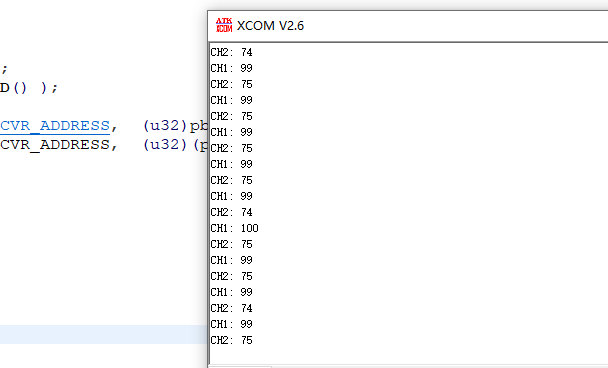
至此,测试实验完毕!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号