
TIM--怎么输出具有相位差的PWM波形
在有些电机,等一些常见特殊应用场合经常遇到需要输出具备有一定相位差的PWM波形
实现一
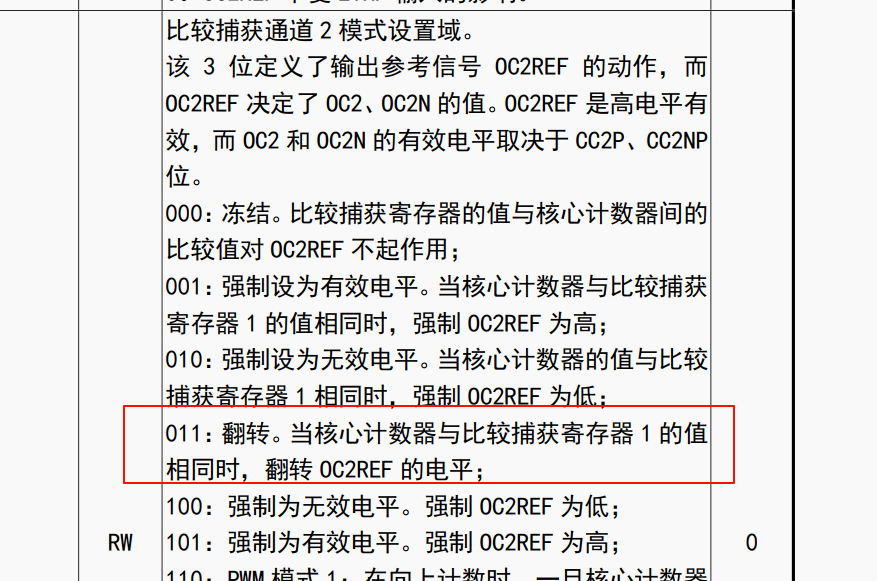
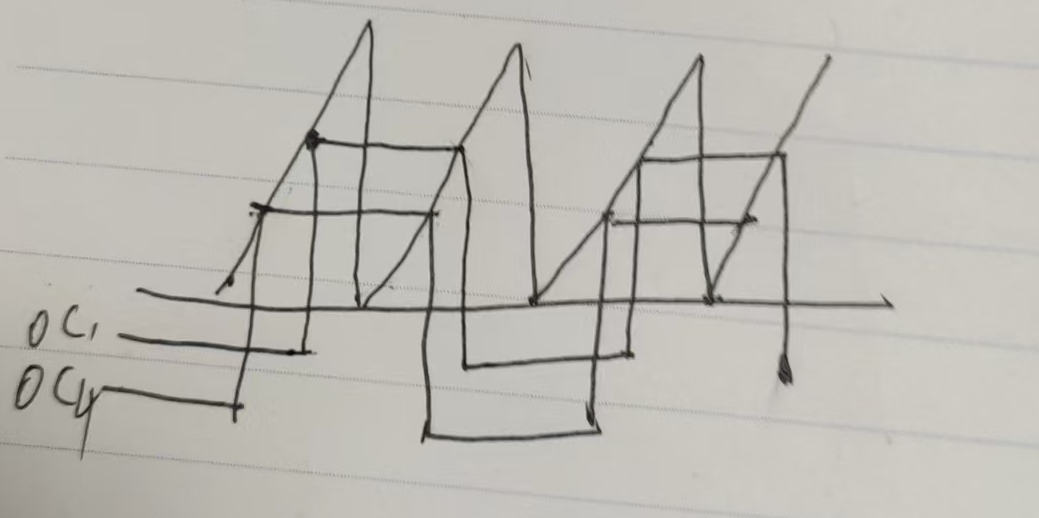
利用定时器的翻转模式:
翻转模式手册介绍:即当计数器计数到比较值时会翻转对应通道值电平,原理如下草图。那么只要比较值设的不同,即可实现类似的效果。
但有个限制,这种只能实现百分之50占空比。
void TIM1_Phase_shift_Init1( void ) { GPIO_InitTypeDef GPIO_InitStructure={0}; TIM_OCInitTypeDef TIM_OCInitStructure={0}; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0}; RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOD |RCC_APB2Periph_GPIOC | RCC_APB2Periph_TIM1, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init( GPIOD, &GPIO_InitStructure ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_Init( GPIOC, &GPIO_InitStructure ); TIM_TimeBaseInitStructure.TIM_Period = 100-1; TIM_TimeBaseInitStructure.TIM_Prescaler = 4800-1; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit( TIM1, &TIM_TimeBaseInitStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;//翻转模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OC1Init( TIM1, &TIM_OCInitStructure ); TIM_OCInitStructure.TIM_Pulse = 99;//Phase shift 90 TIM_OC4Init( TIM1, &TIM_OCInitStructure ); TIM_CtrlPWMOutputs(TIM1, ENABLE ); TIM_OC1PreloadConfig( TIM1, TIM_OCPreload_Disable ); TIM_OC4PreloadConfig( TIM1, TIM_OCPreload_Disable ); TIM_ARRPreloadConfig( TIM1, ENABLE ); TIM_Cmd( TIM1, ENABLE ); }
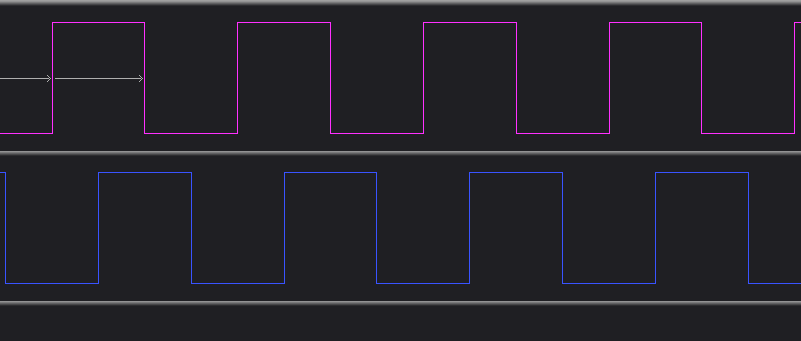
实现效果:
实现二,
上述方法只能输出50百分比,如果想实现占空比可改,又可以移相那么就需要两个定时器,用到定时器的主从触发
主从触发设置讲解可参考该链接:https://www.cnblogs.com/wchmcu/p/17177773.html
实现原理:定时器一做主,定时器二做从,利用定时器一的OC1触发(即定时器计数到比较捕获值时 从而触发定时器二启动)
void TIM1_Phase_shift_Init2( void ) { GPIO_InitTypeDef GPIO_InitStructure={0}; TIM_OCInitTypeDef TIM_OCInitStructure={0}; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0}; RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE ); RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM2, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init( GPIOD, &GPIO_InitStructure ); TIM_TimeBaseInitStructure.TIM_Period = 100-1; TIM_TimeBaseInitStructure.TIM_Prescaler = 4800-1; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit( TIM1, &TIM_TimeBaseInitStructure); TIM_TimeBaseInit( TIM2, &TIM_TimeBaseInitStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; TIM_OCInitStructure.TIM_Pulse = 10;//Phase shift 90 TIM_OC1Init( TIM1, &TIM_OCInitStructure ); TIM_OCInitStructure.TIM_Pulse = 10; TIM_OC1Init( TIM2, &TIM_OCInitStructure ); TIM_SelectMasterSlaveMode(TIM1, TIM_MasterSlaveMode_Enable); TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_OC1Ref); TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Trigger); TIM_SelectInputTrigger(TIM2, TIM_TS_ITR0); TIM_CtrlPWMOutputs(TIM1, ENABLE ); TIM_OC1PreloadConfig( TIM1, TIM_OCPreload_Disable ); TIM_OC1PreloadConfig( TIM2, TIM_OCPreload_Disable ); TIM_ARRPreloadConfig( TIM1, ENABLE ); TIM_ARRPreloadConfig( TIM2, ENABLE ); TIM_Cmd( TIM1, ENABLE ); }
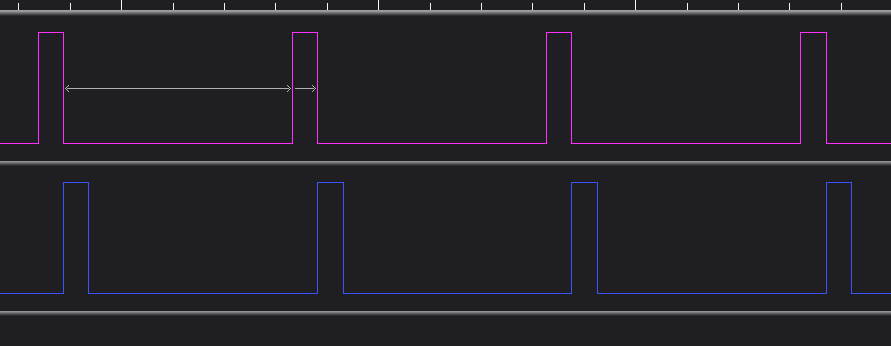
实现效果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号