

CF559E Gerald and Path 题解
很困难的 DP 题,状态不是很好想。对于这种线段覆盖类题目,显然先覆盖哪个线段没有影响,我们可以通过按照端点位置升序排序后按照顺序考虑,这样可能会有一些额外性质。
之后,考虑转移时需要什么东西来刻画一个状态的轮廓。显然我们需要知道现在是第几条线段,并且计算贡献需要知道覆盖右端点最远的线段以及其方向。如果这样设计状态,非最远线段的影响就会在加入最远线段时被计算,是正确的。
设状态 \(f_{i,j,k}\) 表示考虑到第 \(i\) 条线段,右端点最远的线段为 \(j\),方向为 \(k\)。考虑刷表,枚举 \(p\) 为考虑到的线段,\(q\) 为其方向。我们可以在从小到大枚举 \(p\) 的时候顺便记录右端点最大的值 \(x\) 与此时的方向 \(y\)。

假设方向全都是向右,我们可以通过上图辅助理解。我们发现,增加的贡献可以分为两段。一段是 \(l+1\sim r\),另一段是 \(r+1\sim mx\)。在此图中,第一段贡献为 \(r-l\),第二段贡献是 \(mx-r\),把这些加到转移时的贡献中。事实上,如果方向不是向右,也是一样的,
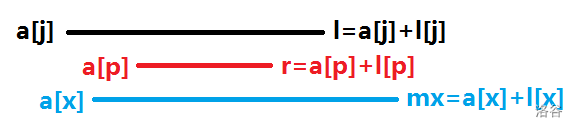
假设方向全都是向右,注意到还有这种情况。此时第二段贡献还是 \(mx-r\),但是第一段贡献需要减去 \(l-r\)。注意到这等价于加上 \(r-l\),所以维持原转移不变。
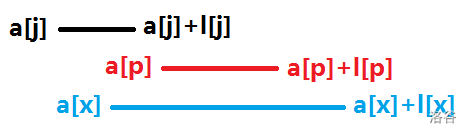
假设方向全都是向右,注意到还有这种情况。第二段贡献不变,但处理第一段时,如果 \(l\) 和 \(r\) 中间有空隙,那么 \(r-l\) 算出来的贡献就过大了,应该只有 \(l[p]\)。此时我们只需要把 \(r-l\) 和 \(l[p]\) 取较小值。
综上所述,状态转移方程为如下。
\[f_{p,x,y}=\max\{f_{p,x,y},f_{i,j,k}+\min\{l[p],r-l\}+mx-r\}
\]
时间复杂度 \(O(n^3)\)。
#include <bits/stdc++.h>
using namespace std;
struct val
{
long long a,l;
}a[200];
long long n,f[200][200][2],ans=0;
bool cmp(struct val a,struct val b)
{
return a.a<b.a;
}
int main()
{
scanf("%lld",&n);
for(int i=1;i<=n;i++)scanf("%lld%lld",&a[i].a,&a[i].l);
sort(a+1,a+n+1,cmp);
a[0].a=-1e18;
for(int i=0;i<=n;i++)
for(int j=0;j<=i;j++)
for(int k=0;k<2;k++)
{
long long l=a[j].a+k*a[j].l,mx=-1e18,x=0,y=0;
for(int p=i+1;p<=n;p++)
for(int q=0;q<2;q++)
{
long long r=a[p].a+q*a[p].l;
if(r>mx)mx=r,x=p,y=q;
f[p][x][y]=max(f[p][x][y],f[i][j][k]+min(a[p].l,r-l)+mx-r);
}
}
for(int i=0;i<=n;i++)
for(int j=0;j<=i;j++)
for(int k=0;k<2;k++)
ans=max(ans,f[i][j][k]);
printf("%lld\n",ans);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号