
摘要:
摩尔纹 成像系统装配精度控制 随着摄像头像素提升、集成光学防抖功能等,对制造精度要求越来越高。高性能摄像头的制作通常采用光学主动对准设备(AA机,AA Machine,Active Alignment Machine)。AA 机在组装每一个零部件时将检测被组装的半成品,根据被组装的半成品的情况主动对 阅读全文
posted @ 2023-07-06 17:11
小淼博客
阅读(206)
评论(0)
推荐(0)


|
摘要:
摩尔纹 成像系统装配精度控制 随着摄像头像素提升、集成光学防抖功能等,对制造精度要求越来越高。高性能摄像头的制作通常采用光学主动对准设备(AA机,AA Machine,Active Alignment Machine)。AA 机在组装每一个零部件时将检测被组装的半成品,根据被组装的半成品的情况主动对 阅读全文
posted @ 2023-07-06 17:11
小淼博客
阅读(206)
评论(0)
推荐(0)
摘要:
一、BRDF实验数据使用方法 1. 数据集-下载 I. 数据集格式(Anisotropic BRDF Data File Format) 解压后的数据集以 .dat 尾缀结束,文件包括了 64Bytes 的文件头,用来表示文件中数据的维度,存储格式等信息,在表头之后的便是对应的数据值,具体如下所示: 阅读全文
posted @ 2023-07-05 10:35
小淼博客
阅读(232)
评论(0)
推荐(0)
摘要:
一、光学结构 1. CMOS子结构解析: OCMA(On-Chip Microlens Array): 用于汇聚光线; OCCFA(On-Chip Color Filter Array): 用于采集彩色信息; LS(Light Shield): 用于防止像素之间光的串流; 2. 填充因子 - Fil 阅读全文
posted @ 2023-06-29 12:11
小淼博客
阅读(284)
评论(0)
推荐(0)
摘要:
CMOS光电转换特性 1. 量子效率和响应率 -PHOTOCONVERSION CHARACTERISTICS 总量子效率(Overall quantum efficiency, QE) 指入射光子转成像素电荷的效率,由下式给出: \[\begin{align*} QE(\lambda)=N_{si 阅读全文
posted @ 2023-06-21 10:37
小淼博客
阅读(2353)
评论(0)
推荐(0)
摘要:
# 基础物理概念 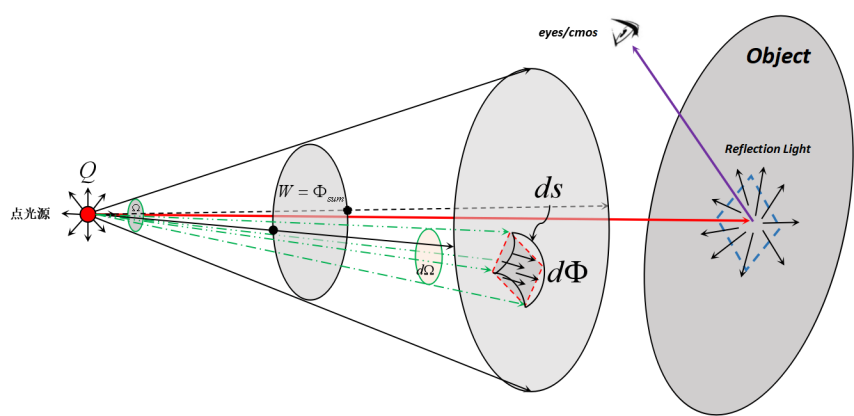 :sunflower: ***Tips:*** 立体角的规定为当前球面表面积与球体半径平 阅读全文
posted @ 2023-06-19 17:27
小淼博客
阅读(1766)
评论(0)
推荐(0)
摘要:
# 一、基本概述 双向反射分布函数(Bidirectional Reflectance Distribution Function,BRDF)是用来定义给定入射方向上的辐射照度如何影响给定出射方向上的辐射率。更笼统地说,它描述了入射光线经过某个表面反射后如何在各个出射方向上分布这可以是从理想镜面反射 阅读全文
posted @ 2023-06-15 14:35
小淼博客
阅读(1891)
评论(1)
推荐(1)
摘要:
一、光源模型概述 在成像系统中,光源作为成像过程中的重要环节,需要对其进行良好的模型建立,从而深入理解在渲染或实际成像过程中的需求,通过理解光源模型,从而设置合理的曝光时间、光圈大小等参数,对实际工程应用领域也有非常重要的指导作用。 二、光源基础模型 1. 定向光(Directional Light 阅读全文
posted @ 2023-06-14 19:06
小淼博客
阅读(304)
评论(0)
推荐(0)
摘要:
# 1. libcamera and libcamera-apps工具简介 + I. [libcamera](https://libcamera.org/) 是一款用来支持用户基于Linux 操作系统控制复杂相机的应用程序,用户可以通过libcamera直接操作树莓派芯片集成的GPU模块。 + II 阅读全文
posted @ 2023-06-06 16:26
小淼博客
阅读(8677)
评论(0)
推荐(0)
|
博客园
 浙公网安备 33010602011771号
浙ICP备2021040463号-3
浙公网安备 33010602011771号
浙ICP备2021040463号-3
大家转载请注明出处!谢谢! 在这里要感谢GISPALAB实验室的各位老师和学长学姐的帮助!谢谢~