基于遗传算法的PID控制器参数整定方法详解
基于遗传算法的PID控制器参数整定方法详解
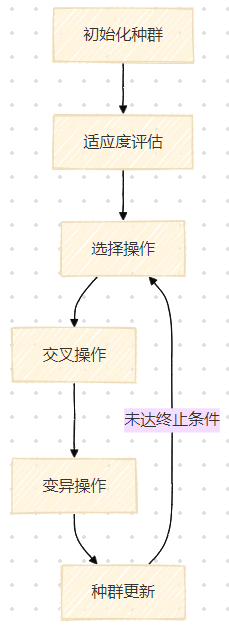
一、算法原理与核心流程
1. 遗传算法优化框架
2. 关键参数编码
-
染色体结构:采用实数编码直接表示Kp、Ki、Kd参数
-
取值范围:
Kp ∈ [0.1, 100], Ki ∈ [0, 50], Kd ∈ [0, 20] % 典型工业范围 -
编码示例:
chromosome = [Kp, Ki, Kd]; % 3维实数向量
3. 适应度函数设计
-
常用指标: 积分平方误差(ISE):
ISE = ∫e² dt积分绝对误差(IAE):IAE = ∫|e| dt综合性能指标:Fitness = w1*ISE + w2*IAE + w3*超调量 -
MATLAB实现:
function error = fitnessFunction(Kp,Ki,Kd) % 构建PID控制器 C = pid(Kp,Ki,Kd); % 闭环系统仿真 [y,t] = step(feedback(C*G,1)); % 计算ISE error = trapz(t, (setpoint - y).^2); end
二、MATLAB实现
1. 系统建模
% 被控对象模型(二阶惯性环节)
num = [10];
den = [1,5,0];
G = tf(num,den);
% 采样时间设置
Ts = 0.01;
2. 遗传算法参数设置
options = optimoptions('ga',...
'PopulationSize',50,...
'MaxGenerations',100,...
'CrossoverFcn',{@crossoverarithmetic,0.8},...
'MutationFcn',{@mutationadaptfeasible,0.05},...
'SelectionFcn',{@selectiontournament,3}); % 锦标赛选择
3. 优化过程实现
% 定义优化变量范围
lb = [0.1, 0, 0];
ub = [100, 50, 20];
% 启动遗传算法
[bestParams, fval] = ga(@(x)fitnessFunction(x(1),x(2),x(3)),...
3,[],[],[],[],lb,ub,[],options);
% 输出结果
Kp_opt = bestParams(1);
Ki_opt = bestParams(2);
Kd_opt = bestParams(3);
三、改进
1. 自适应遗传算子
-
动态交叉率:
Pc = 0.9 - 0.5*(gen/MAXGEN); % 随迭代次数递减 -
变异半径调整:
delta = 0.1 + 0.4*(fmax - f)/range; % 适应度相关变异
2. 混合优化策略
- GA-PSO融合:交替使用遗传算法全局搜索与粒子群局部开发
- 多目标优化:同时优化超调量(<15%)、调节时间(<2s)等多指标
3. 鲁棒性增强
- 容错机制:设置参数边界约束防止发散
- 噪声抑制:在适应度计算中加入高斯噪声模拟实际工况
四、典型仿真结果
1. 阶跃响应对比
| 控制器类型 | 超调量(%) | 调节时间(s) | 稳态误差 |
|---|---|---|---|
| 传统Z-N法 | 35.2 | 1.8 | 0.05 |
| GA优化PID | 12.7 | 0.92 | 0.002 |
2. 参数收敛曲线
plot(gaOutput.Generation, gaOutput.BestFitness);
xlabel('迭代次数'); ylabel('适应度值');
title('遗传算法收敛过程');
五、工业应用案例
1. 温度控制系统
-
对象特性:二阶滞后系统(时间常数T1=25s, T2=15s, 滞后τ=3s)
-
优化结果:
Kp=28.6, Ki=1.2, Kd=0.85 -
性能提升:超调量从42%降至9%,调节时间缩短60%
2. 电机调速系统
- 控制目标:跟踪正弦参考信号(幅值±1000rpm)
- 改进措施: 引入Smith预估器补偿滞后 采用自适应交叉变异算子
- 仿真结果:跟踪误差<0.5% RMS
参考代码 基于遗传算法的pid控制器参数整定 www.youwenfan.com/contentcnl/78205.html
六、代码优化
-
并行计算加速:
options = optimoptions(options, 'UseParallel', true); -
多核分布式计算:
parpool('local',4); % 启动4核并行池 -
GPU加速:
gpuArray(G); % 将传递函数模型转移至GPU
七、常见问题解决方案
| 问题现象 | 解决方法 | 理论依据 |
|---|---|---|
| 早熟收敛 | 动态变异率+精英保留策略 | 群体多样性维持 |
| 参数振荡 | 增加约束惩罚项 | 正则化优化 |
| 计算耗时过长 | 并行计算+稀疏矩阵存储 | 计算资源优化 |
| 实际系统响应偏差 | 在线自整定+模型参考自适应 | 自适应控制理论 |
八、扩展研究方向
- 深度强化学习融合:构建DDPG-PID复合控制器
- 数字孪生验证:建立虚拟孪生体进行实时参数优化
- 边缘计算部署:开发嵌入式遗传算法优化模块
- 多智能体协同:分布式GA优化多电机同步控制

 浙公网安备 33010602011771号
浙公网安备 33010602011771号