万向锁理解
如《视觉SLAM十四讲》中所述:“在俯仰角为±90°时,第一次旋转与第三次旋转将会使用同一个轴,使得系统丢失了一个自由度。”,其实就是想告诉你,这三次旋转所产生的结果,也可由两次旋转来表示,所以造成了不确定性。
最需要关注的重点是:“第一次旋转与第三次旋转将会使用同一个轴”。
如slam十四讲中的图,首先绕Z轴旋转任意角度。
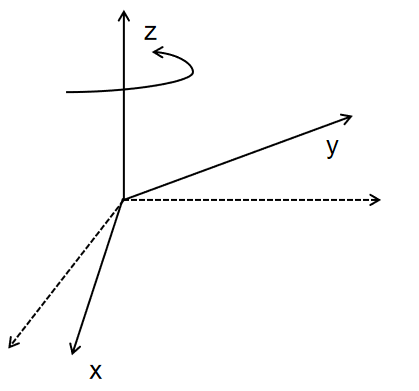
图1
其次再绕y轴90°,使得x轴旋转至原始坐标系下z轴的反方向上。
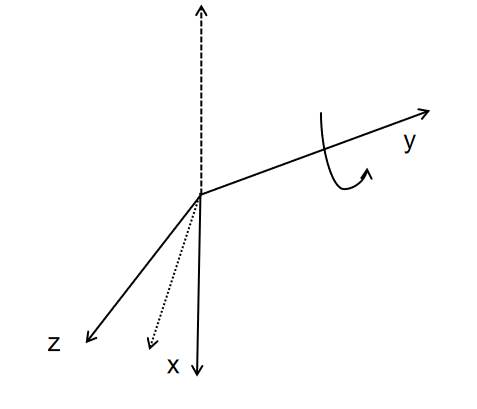
图2
最后,我们旋转x轴任意角度。这个时候就是书中所说的“第一次旋转与第三次旋转使用了同一个轴”,即图1和图3中旋转的是一个轴。接着书中说“使得系统丢失了一个自由度”,其实是说图3步骤旋转的这个量可在图1步骤中完成,即绕一个轴旋转可能会覆盖住另一个轴的旋转,就会造成不确定。这三幅图的工作完全可以由前两幅图的步骤完成。
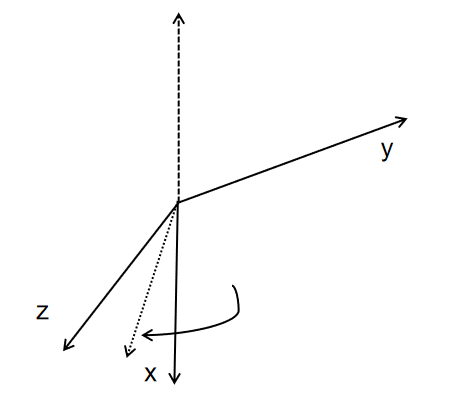
图3
我们再倒回来看看别人对万向锁的理解:“是指物体的两个旋转轴指向同一个方向。实际上,当两个旋转轴平行时,我们就说万向节锁现象发生了,换句话说,绕一个轴旋转可能会覆盖住另一个轴的旋转,从而失去一维自由度”。
可以将上述的情况拓展到绕x轴旋转90°,绕z轴旋转90°,都会出现万向锁的结果。
请各位批评指正!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号