从源码到进程:05.可执行程序的装载与启动
前言
在之前的文章中,我们详细讲解了linux系统下动态库的实现机制,并且通过gdb调试验证了动态库加载的过程。
在这篇文章中,我们将继续从源码到进程这个主题,详细讲解linux下,一个磁盘上的可执行文件,是怎么变成运行在内存上的进程的,也就是可执行程序的装载过程。
Linux中的进程
要理解这个装载的过程,首就要对进程本身有一个理解。
在Linux中,进程到底是什么?
它不是一个程序,也不是代码。在内核的视角里,一个进程本质上只是一个数据结构,即大名鼎鼎的task_struct,也就是咱们在课本上经常听的进程控制块(Process Control Block, PCB)。
这个结构体是内核管理和调度一切的抓手,它记录了进程的PID、状态、权限、打开的文件、信号处理器,以及最重要的——它指向的内存映像(mm_struct)。
进程如何“跑”起来?
进程的执行依赖于两个核心概念:
- 虚拟地址空间 (Virtual Address Space):每个进程都拥有自己独立的、从0开始的虚拟地址空间。这是一个“沙盒”,让进程以为自己独占了整个内存。
- 页管理 (Paging):CPU的内存管理单元(MMU)负责将进程访问的“虚拟地址”翻译成“物理内存地址”。内核通过维护一张 页表(Page Table) 来实现这种映射。
因此,“加载一个程序”的本质,就是内核去填充这个task_struct,并为其建立一套全新的虚拟地址空间和对应的页表映射,将ELF文件中的内容(代码、数据)“映射”到这个地址空间中。
进程的构建过程
申请资源
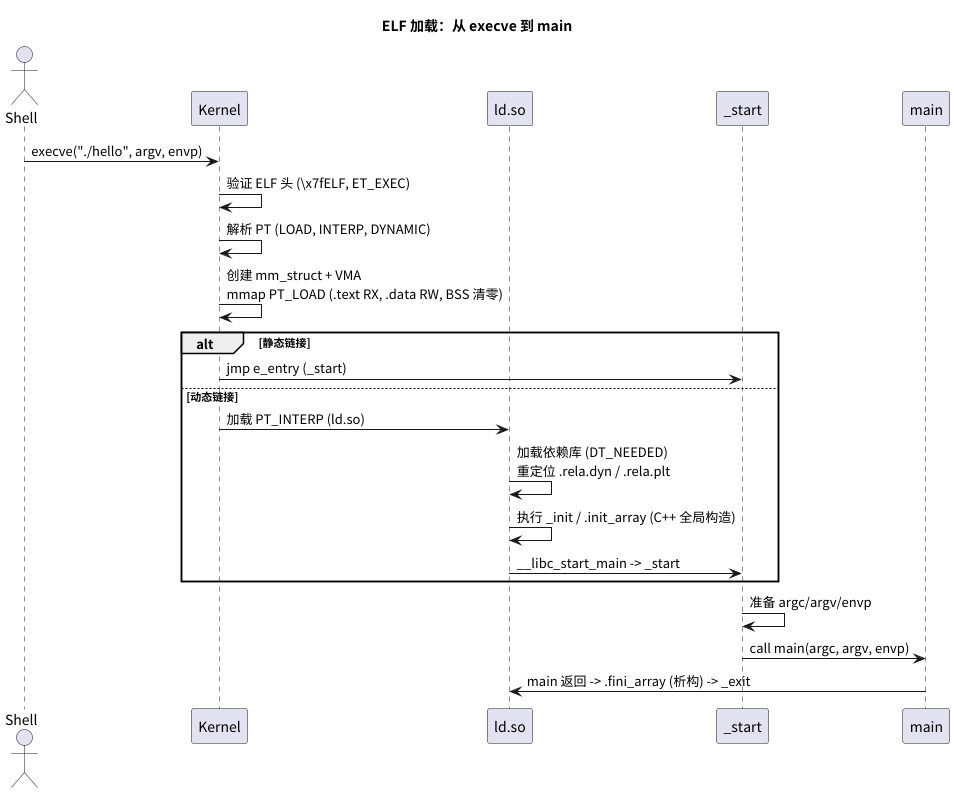
当我们在shell中执行./hello时,fork()创建了一个子进程(几乎是父进程的克隆),然后这个子进程调用execve("./hello", ...)系统调用。这个系统调用,就是程序开始装载的开始。
execve的使命是:丢弃当前的内存映像,换上一个全新的程序。
内核此时会:
- 查找并验证格式:内核会读取文件头部,通过
x7fELF魔数识别出这是一个ELF文件,并找到对应的处理器binfmt_elf。 - 销毁旧世界:内核会毫不留情地释放当前进程的旧虚拟地址空间(解散旧的
mm_struct和所有VMA)。 - 创建新骨架:内核会创建一个新的
mm_struct(内存描述符)和task_struct中的相关字段,为新程序准备一个干净的“沙盒”。
至此,我们有了一个“空”的进程骨架,得到了我们用来描述的资源。
填充内容
现在,内核需要按照ELF这张“蓝图”,将代码和数据填充到这个新的虚拟地址空间中。
程序想跑,至少要知道在哪里跑?
这就是ELF文件“执行视图”(Program Headers)的用武之地。内核会遍历readelf -l看到的每一个PT_LOAD段:
- 代码段(.text, .rodata, ...):内核看到一个
PT_LOAD段,它标记为可读、可执行(R E)。内核会在虚拟地址空间中创建一块区域(VMA,vm_area_struct),并将其权限设置为VM_READ | VM_EXEC。 - 数据段(.data, .bss):内核看到另一个
PT_LOAD段,它标记为可读、可写(RW)。内核会创建另一块VMA,并将其权限设置为VM_READ | VM_WRITE。
关键机制:延迟加载(Demand Paging)
内核在这一步并不会真的去从磁盘读取G字节的数据。它只是建立了“映射关系”。它在页表中将这些虚拟地址标记为“存在”,但“不在物理内存中”。
当CPU第一次尝试执行位于代码段的某条指令时,MMU发现这个虚拟地址没有对应的物理内存,就会触发一个 缺页异常 (Page Fault) 。
此时内核才会被唤醒,它检查这个地址是否合法(是否在某个VMA内),然后才去磁盘上读取那一页(通常是4KB)的代码,将其加载到物理内存,更新页表,然后让CPU重新执行那条指令。
这就是为什么即使是G字节大小的程序,启动也可能非常快的原因。
对于.bss段(未初始化的全局变量),它在文件中不占空间(FileSiz < MemSiz)。内核会为这部分多出来的虚拟内存映射一个特殊的、全零的“匿名页”,实现了C/C++标准中“全局变量默认初始化为0”的承诺。
设置入口点
内核已经把内存空间准备好了。现在,它必须设置一个“入口点”,告诉CPU从哪里开始执行第一条指令。
这个入口点 不是main ,而是ELF头中指定的e_entry地址。
此时,控制权交给了 C运行时库 (glibc) 。这里分为两种情况:
情况一:静态链接
_start函数(来自crt1.o)被直接链接到程序中。它就是e_entry。
_start的任务很单纯:
- 从堆栈上准备好
argc,argv,envp。 - 调用
__libc_start_main函数。
情况二:动态链接(现代C++程序的常态)
- 内核在解析Program Headers时,会发现一个
PT_INTERP段,它指向一个程序:/lib64/ld-linux-x86-64.so.2。 - 内核的入口点:内核会将动态链接器 (
ld.so) 加载到内存,并将e_entry设置为ld.so的入口点。 ld.so接管:ld.so首先开始运行。它负责:- 加载程序所依赖的所有共享库(如
libstdc++.so,libc.so)。 - 对所有跨库的函数调用进行“重定位”(Relocation),填平
.got.plt表。 - 完成所有库的加载后,
ld.so才会跳转到程序自己的e_entry(即_start)。
- 加载程序所依赖的所有共享库(如
无论哪种情况,最终都会调用到glibc中的__libc_start_main。
C++的特殊性:.init_array的执行
__libc_start_main是进入main前最后的处理函数。它除了初始化线程、I/O等,还必须处理C++的特殊需求。
C++允许我们定义具有复杂构造函数的全局对象:
std::ofstream log_file("global.log"); // 需要在main之前运行
int main() {
log_file << "Main started" << std::endl;
}
log_file的构造函数必须在main之前执行。编译器和链接器如何实现这一点?
它们会将这个构造函数的指针(或一个调用它的辅助函数指针)放入一个特殊的、只读的节:.init_array。
__libc_start_main在调用main之前,会执行一个循环,遍历.init_array中的每一个函数指针并调用它们,确保所有全局对象都按顺序被正确构造。
在main返回后,__libc_start_main还会去遍历.fini_array,执行全局对象的析构函数。
实验演示与源码剖析
gdb调试
让我们用GDB来亲眼见证这个过程。
elf_load_test.cpp:
#include <iostream>
struct GlobalInitializer {
GlobalInitializer() {
std::cout << "Global constructor (.init_array) running!" << std::endl;
}
~GlobalInitializer() {
std::cout << "Global destructor (.fini_array) running!" << std::endl;
}
};
GlobalInitializer g_init; // .init_array 将包含调用其构造函数的代码
int main() {
std::cout << "main() function running!" << std::endl;
return 0;
}
g++ -g -o main elf_load_test.cpp
使用GDB调试:
- 查看入口点:
# 启动gdb调试
gdb ./main
# 查看入口信息
(gdb) info file
## 会出现类似的信息
Entry point: 0x10a0 #这是 _start 的地址,不是 main
0x0000000000000318 - 0x0000000000000334 is .interp
.....
0x0000000000003d88 - 0x0000000000003d98 is .init_array
- 在入口点和main打断点:
(gdb) b _start
Breakpoint 1 at 0x10a0
(gdb) b __libc_start_main_impl
Function "__libc_start_main_impl" not defined.
Make breakpoint pending on future shared library load? (y or [n]) y
Breakpoint 2 (__libc_start_main_impl) pending.
(gdb) b main
Breakpoint 3 at 0x1191: file elf_load_test.cpp, line 15.
- 执行起来:
可以看到类似的输出
(gdb) r
Starting program:
Breakpoint 1, 0x00007ffff7fe3290 in _start () from /lib64/ld-linux-x86-64.so.2
(gdb) c
Continuing.
[Thread debugging using libthread_db enabled]
Using host libthread_db library "/lib/x86_64-linux-gnu/libthread_db.so.1".
Breakpoint 1, 0x00005555555550a0 in _start ()
(gdb) c
Continuing.
Breakpoint 2, __libc_start_main_impl (main=0x555555555189 <main()>, argc=1, argv=0x7fffffffd998, init=0x0, fini=0x0, rtld_fini=0x7ffff7fc9040 <_dl_fini>, stack_end=0x7fffffffd988) at ../csu/libc-start.c:242
242 ../csu/libc-start.c: 没有那个文件或目录.
(gdb) c
Continuing.
Global constructor (.init_array) running!
Breakpoint 3, main () at elf_load_test.cpp:15
15 std::cout << "main() function running!" << std::endl;
(gdb) c
Continuing.
main() function running!
Global destructor (.fini_array) running!
这清晰地证明了执行顺序:_start -> __libc_start_main -> .init_array (全局构造) -> main的过程。
linux内核源码剖析
之前讲解的理论部分,在现代的Linux内核中都有体现。在Linux内核中的fs/binfmt_elf.c文件就实现了相关的部分,其核心函数是load_elf_binary。
让我们来看看它(基于现代内核,已简化)的关键步骤:
- 验证ELF头:
内核首先把bprm->buf(已经由用户态execve()传来的文件头缓冲区)当作ELF头结构elfhdr读取,并做一系列基本一致性检查:
struct elfhdr *elf_ex = (struct elfhdr *)bprm->buf;
// 检查魔数(ELF 标识)是否匹配,若不匹配直接返回-ENOEXEC(不是ELF)
if (memcmp(elf_ex->e_ident, ELFMAG, SELFMAG) != 0)
goto out;
//只接受 ET_EXEC(普通可执行文件)或 ET_DYN(位置无关可执行/共享对象,如 PIE / 动态解释器本身),其它类型拒绝。
if (elf_ex->e_type != ET_EXEC && elf_ex->e_type != ET_DYN)
goto out;
// 体系结构检查(是否为当前 CPU / 内核支持的 ABI)
if (!elf_check_arch(elf_ex))
goto out;
// 检查是否为 FDPIC(特定 ABI),若不支持则拒绝
if (elf_check_fdpic(elf_ex))
goto out;
// 确保内核可以对该文件做 mmap(以后要用 mmap 映射段),否则拒绝
if (!bprm->file->f_op->mmap)
goto out;
这些检查保证内核只在能正确处理的 ELF 文件上继续后续流程
- 解析程序头表(Program Headers):
内核会读取ELF文件中的程序头表。
// load_elf_phdrs() 从 ELF 文件中读取并返回程序头表(struct elf_phdr[])。内核把程序头表拷贝到内核空间(elf_phdata),方便后续逐段处理。若读取失败则返回错误。
elf_phdata = load_elf_phdrs(elf_ex, bprm->file);
if (!elf_phdata)
goto out;
程序头表包含 PT_LOAD, PT_INTERP, PT_PHDR, PT_GNU_STACK 等条目,后续流程就是基于这些 header 做决策与映射。
- 寻找
PT_INTERP(动态链接器):
elf_ppnt = elf_phdata;
for (i = 0; i < elf_ex->e_phnum; i++, elf_ppnt++) {
if (elf_ppnt->p_type == PT_GNU_PROPERTY) {
elf_property_phdata = elf_ppnt;
continue;
}
if (elf_ppnt->p_type != PT_INTERP)
continue;
// 读取 p_filesz 字节作为解释器路径(例如 /lib/ld-linux.so.2 或 /lib64/ld-linux-x86-64.so.2),并确保以 '\0' 结尾。
if (elf_ppnt->p_filesz > PATH_MAX || elf_ppnt->p_filesz < 2)
goto out_free_ph;
elf_interpreter = kmalloc(elf_ppnt->p_filesz, GFP_KERNEL);
retval = elf_read(bprm->file, elf_interpreter, elf_ppnt->p_filesz,
elf_ppnt->p_offset);
if (retval < 0)
goto out_free_interp;
if (elf_interpreter[elf_ppnt->p_filesz - 1] != '\0')
goto out_free_interp;
//打开该解释器文件
interpreter = open_exec(elf_interpreter);
kfree(elf_interpreter);
if (IS_ERR(interpreter))
goto out_free_ph;
would_dump(bprm, interpreter);
interp_elf_ex = kmalloc(sizeof(*interp_elf_ex), GFP_KERNEL);
// 读取解释器本身的 ELF 头(interp_elf_ex),以便后续验证和加载解释器的段
retval = elf_read(interpreter, interp_elf_ex, sizeof(*interp_elf_ex), 0);
if (retval < 0)
goto out_free_dentry;
break;
}
- 创建新的内存映像:
这是execve的核心步骤之一,内核会为进程创建新的内存上下文。
在正式映射之前,内核需要做一系列准备工作:
// 解析 PT_GNU_PROPERTY(如果有),并把平台/ABI相关信息填到 arch_state
retval = parse_elf_properties(interpreter ?: bprm->file,
elf_property_phdata, &arch_state);
if (retval)
goto out_free_dentry;
// 允许架构特定代码(arch)基于 ELF 和 interpreter 判断是否接受执行,或进行一些架构检查
retval = arch_check_elf(elf_ex, !!interpreter, interp_elf_ex, &arch_state);
if (retval)
goto out_free_dentry;
// 清除当前进程的执行上下文(关闭旧 mm 的执行凭证、释放旧地址空间的某些资源等),为新程序“重新上发条”
retval = begin_new_exec(bprm);
if (retval)
goto out_free_dentry;
// 根据 ELF header 设置进程 persona(兼容/ABI 标志)
SET_PERSONALITY2(*elf_ex, &arch_state);
// 根据可执行栈标志调整 READ_IMPLIES_EXEC,并根据进程 persona/randomize 标志设置 PF_RANDOMIZE(决定后续地址随机化)。
if (elf_read_implies_exec(*elf_ex, executable_stack))
current->personality |= READ_IMPLIES_EXEC;
if (!(current->personality & ADDR_NO_RANDOMIZE) && randomize_va_space)
current->flags |= PF_RANDOMIZE;
// 为进程设置新的 mm、构造用户栈上的 argv/envp/auxv(setup_arg_pages也可能需要STACK_TOP` 位置,受 personality 影响)
setup_new_exec(bprm);
retval = setup_arg_pages(bprm, randomize_stack_top(STACK_TOP), executable_stack);
if (retval < 0)
goto out_free_dentry;
这些步骤把进程状态配置成可以安全地把新的 ELF 映射进来,并把用户栈准备好
5. 核心:mmap映射PT_LOAD段:
这段是 load_elf_binary() 的核心:遍历所有 PT_LOAD 段并把它们 mmap 到进程地址空间:
elf_brk = 0;
start_code = ~0UL;
end_code = 0;
start_data = 0;
end_data = 0;
for (i = 0, elf_ppnt = elf_phdata; i < elf_ex->e_phnum; i++, elf_ppnt++) {
if (elf_ppnt->p_type != PT_LOAD)
continue;
// 把 ELF 段的 p_flags(读/写/执行)与架构状态转换为内核所需的 PROT_READ/PROT_WRITE/PROT_EXEC 权限集合(并处理特殊架构要求)
elf_prot = make_prot(elf_ppnt->p_flags, &arch_state, !!interpreter, false);
// elf_flags 初始为 MAP_PRIVATE,再根据首次加载、ET_EXEC / ET_DYN、是否已有解释器等条件加上 MAP_FIXED_NOREPLACE 或 MAP_FIXED。
elf_flags = MAP_PRIVATE;
vaddr = elf_ppnt->p_vaddr;
......
// 实际把文件(或文件某段)映射到内存并处理 .bss 区(零填充)/文件大小 vs 内存大小差异。返回值可能是映射的起始地址或错误
error = elf_load(bprm->file, load_bias + vaddr, elf_ppnt, elf_prot, elf_flags, total_size);
if (BAD_ADDR(error)) { retval = IS_ERR_VALUE(error) ? PTR_ERR((void*)error) : -EINVAL; goto out_free_dentry; }
// 首次映射后调整 load_bias(对 ET_DYN),确保后续基址计算正确,reloc_func_desc 也在此填充(用于某些平台函数描述符重定位)。
if (first_pt_load) {
first_pt_load = 0;
if (elf_ex->e_type == ET_DYN) {
load_bias += error - ELF_PAGESTART(load_bias + vaddr);
reloc_func_desc = load_bias;
}
}
/* 计算 phdr 地址(phdr_addr)、start_code/end_code、elf_brk */
if (elf_ppnt->p_offset <= elf_ex->e_phoff &&
elf_ex->e_phoff < elf_ppnt->p_offset + elf_ppnt->p_filesz) {
phdr_addr = elf_ex->e_phoff - elf_ppnt->p_offset + elf_ppnt->p_vaddr;
}
k = elf_ppnt->p_vaddr;
if ((elf_ppnt->p_flags & PF_X) && k < start_code)
start_code = k;
if (start_data < k)
start_data = k;
/* 安全检查 p_memsz / TASK_SIZE */
if (BAD_ADDR(k) || elf_ppnt->p_filesz > elf_ppnt->p_memsz ||
elf_ppnt->p_memsz > TASK_SIZE ||
TASK_SIZE - elf_ppnt->p_memsz < k) {
retval = -EINVAL;
goto out_free_dentry;
}
// 检查 p_filesz <= p_memsz、p_memsz <= TASK_SIZE、避免地址溢出(防止构造恶意 ELF 导致内核映射超出允许范围)。
k = elf_ppnt->p_vaddr + elf_ppnt->p_filesz;
if ((elf_ppnt->p_flags & PF_X) && end_code < k)
end_code = k;
if (end_data < k)
end_data = k;
k = elf_ppnt->p_vaddr + elf_ppnt->p_memsz;
if (k > elf_brk)
elf_brk = k;
}
- 加载动态链接器(如果存在):
如果interpreter不为NULL,内核会打开这个文件(ld.so),并加载它。ld.so本身也是一个ELF文件。
// 在映射完主 ELF 的 PT_LOAD 段后,把所有计算累加 load_bias(基址偏移)以得到真实的地址空间位置,并把 mm->brk(程序 break/heap 初始位置)设置为 ELF_PAGEALIGN(elf_brk)
e_entry = elf_ex->e_entry + load_bias;
phdr_addr += load_bias;
elf_brk += load_bias;
start_code += load_bias;
end_code += load_bias;
start_data += load_bias;
end_data += load_bias;
current->mm->start_brk = current->mm->brk = ELF_PAGEALIGN(elf_brk);
if (interpreter) {
// 加载解释器,调整e_entry入口地址
elf_entry = load_elf_interp(interp_elf_ex,
interpreter,
load_bias, interp_elf_phdata,
&arch_state);
if (!IS_ERR_VALUE(elf_entry)) {
interp_load_addr = elf_entry;
elf_entry += interp_elf_ex->e_entry;
}
if (BAD_ADDR(elf_entry)) {
retval = IS_ERR_VALUE(elf_entry) ? (int)elf_entry : -EINVAL;
goto out_free_dentry;
}
reloc_func_desc = interp_load_addr;
// 对解释器做 allow_write_access()(之前打开时可能为 open_exec() 把文件设为只读/不可写,加载完成后恢复写权限),fput() 释放文件句柄
allow_write_access(interpreter);
fput(interpreter);
kfree(interp_elf_ex);
kfree(interp_elf_phdata);
} else {
elf_entry = e_entry;
if (BAD_ADDR(elf_entry)) {
retval = -EINVAL;
goto out_free_dentry;
}
}
- 设置入口点,让用户态接管:
//释放临时分配的 elf_phdata。
kfree(elf_phdata);
// 设置当前进程的二进制格式处理器为 ELF(内核内跟踪)
set_binfmt(&elf_format);
.....
// 在用户栈上创建 auxv / ELF program headers 的副本(让动态链接器/用户程序可以访问到 phdr 地址、entry、base 等信息),这一步会把 AT_PHDR/AT_ENTRY/AT_BASE 等 auxv 放到栈上。
retval = create_elf_tables(bprm, elf_ex, interp_load_addr, e_entry, phdr_addr);
if (retval < 0)
goto out;
//更新 mm 的 start_code/end_code/start_data/end_data/start_stack,这些记录对调试器和内存限制有用
mm = current->mm;
mm->end_code = end_code;
mm->start_code = start_code;
mm->start_data = start_data;
mm->end_data = end_data;
mm->start_stack = bprm->p;
/* brk 随机化(ASLR) */
if ((current->flags & PF_RANDOMIZE) && (randomize_va_space > 1)) {
......
}
......
regs = current_pt_regs();
......
//做最终的清理,例如把临时文件名、文件描述符替换为新映像等(bprm 层面的善后)。
finalize_exec(bprm);
// 实际把 rip/eip/pc 设置为 elf_entry 并切换到用户态开始执行用户程序(/ 动态链接器的入口,如果有 interpreter,则先由解释器接管再加载 libc/程序)
START_THREAD(elf_ex, regs, elf_entry, bprm->p);
retval = 0;
至此,用户态程序被“放生”到 CPU 上。内核返回 0 表示 exec 成功(但函数实际上在 START_THREAD 之后不会返回到用户态前继续执行内核路径)
总结
将一个 ELF 文件转变为一个运行中的进程,是内核态与用户态运行时精密协作的结果,清晰地体现了 Linux 在设计上的分层与解耦。
-
内核(binfmt_elf) 负责执行最基础和通用的装载任务。它的核心职责是解析 ELF 程序头(Program Headers),创建进程核心的内存管理结构(mm_struct),并建立虚拟地址空间(VMA)。它通过 mmap 和缺页异常(Demand Paging)机制,高效地将文件的代码和数据段“映射”到这片地址空间,实现了延迟加载。
-
用户态运行时(ld.so 和 glibc) 负责处理后续特定于语言和链接的复杂逻辑。内核在完成基础映射后,根据 PT_INTERP 段(动态链接)或 e_entry(静态链接)移交控制权。用户态的动态链接器或 C 运行时库接管后续工作,包括加载所有共享库、执行符号重定位(填充 GOT/PLT),以及在 main 函数执行前调用 C++ 的全局构造函数(.init_array)。
这种分层设计,使得内核保持了极高的灵活性和稳定性,它无需关心你用的是C++、Go还是Python,只要你符合ELF规范。而C++的复杂运行时环境,则被优雅地交给了用户态的libstdc++和glibc去管理。
最终,一个静态的文件被赋予了生命,成为了一个在虚拟内存中奔跑的、受内核调度的独立进程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号