
【计算摄影学】双边滤波通俗理解以及简单实现
概念
双边滤波是非常常用的一种滤波,在前面我们已经实现了三种滤波:均值滤波、高斯滤波与中值滤波。这三种滤波都能够在一定程度上消除噪声,但是其作用范围有限,只能针对特定种类的噪声。例如高斯滤波针对高斯噪声效果较好,而中值滤波针对椒盐噪声的效果较好。而且,这三种滤波对图像的边缘信息都会有不同程度的损坏,究其原因是没有考虑到图像边缘的信息。因而,我们引入双边滤波,其在利用高斯滤波去噪的同时,能够较好地保存图片的边缘信息。如果你还没有理解高斯滤波,请参考我的这篇博文:https://www.cnblogs.com/suubai/p/12484025.html
一般而言,区分图像是否为边缘部分的方法如下:
- 在图像的边缘部分,像素值的变化较为剧烈。
- 在图像的非边缘区域,像素值的变换较为平坦。
通过以上两点,我们可以总结出,想要保留图像边缘,必须引入一个能够衡量图像像素变换剧烈程度的变量。由此,我们引入了图像像素域核Gr。
首先看双边滤波的公式:

其中,Wp为:

好像开始复杂了起来,那么这两个反人类的表达式究竟是什么意思呢?不要急,接下来我们开始慢慢剖析。
首先我们要知道,双边滤波中有两个衡量图像信息的核心变量,如上式中的Gσs为空间域核,Gσr为图像像素域核。空间域核其实就是二维高斯函数,可以把它视作高斯滤波,像素域核就是衡量像素变化剧烈程度的量。将这两个变量相乘,就可以得到他们俩共同作用的结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。
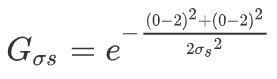
那么具体怎么求解图像的双边滤波呢?首先我们需要知道空间域核计算方法:

以及像素域核的计算方法:

在上面两个式子中,σs与σr都是已知的,或者说是自己输入的预设值,而其他的i,j,m,n都是需要我们在遍历中确定的值。其中(i,j)代表是窗口中心值,(m,n)代表的是滑动窗口中的某个值。
我们知道图像滤波大多数都是卷积的结果,对于双边滤波,其不仅仅是卷积那么简单。但是和卷积类似,都是需要一个滑动窗口来作用于整个图像。如下图所示:
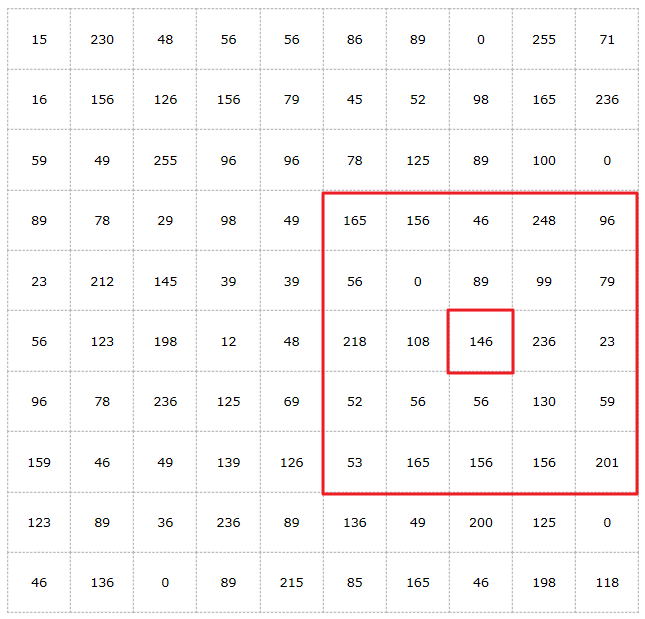
整张图可以看作是10 × 10的一张图像,图中的数字表示每个点的像素值。在图中存在一个5 × 5大小的滑动窗口,我们需要求出中心点146的新像素值。
- 首先遍历整个窗口,第一个遍历到的点是165,那么中心点与该点的空间域计算结果为:
- 再计算中心点与该点的像素域结果:

- 当 σs 与 σr 分别为5和20时,Gσs = 0.8521,Gσr = 0.6368。
- 接着遍历整个窗口,将窗口内每个像素点都与中心点建立联系,求出它们的 Gσs 与 Gσr 的值,将 Gσs 与 Gσr 相乘即得到每个点对应的Wp,即Wp = Gσs × Gσr。
- 在遍历结束后,用每个点的Wp乘上该点的像素值I(m, n),并求和,这是作为分子。将每个点的Wp相加,作为分母,两者相除,即得到需要的新输出图像的中心点(i,j)的像素值。
至此,大功告成。需要注意的是,如果是RGB三通道的图像,每个点的像素值就需要将RGB三通道分开求解。
理论分析
求解双边滤波的过程如下:
- 读取原始图像。
- 设定窗口大小,遍历整个图像,将窗口覆盖内的所有像素值与窗口中心像素比对,求取空间域核与图像像素域核大小,并将两者相乘作为该点的特征值。
- 将每一点的特征值与该点像素值乘积相加,除以所有特征值的和,得到的结果即作为中心点的像素值。
在求解过程中,需要注意的是,如果是RGB三通道的图像,每个点的像素值就需要将RGB三通道分开求解。
实验细节
遍历图像求解特征值
// 遍历图像 for (int i = 0; i < src.rows; i++) { for (int j = 0; j < src.cols; j++) { double fenzi_r, fenmu_r, fenzi_g, fenmu_g, fenzi_b, fenmu_b; fenzi_r = fenmu_r = fenzi_g = fenmu_g = fenzi_b = fenmu_b = 0; for (int m = i - window_size; m <= i + window_size; m++) { for (int n = j - window_size; n <= j + window_size; n++) { if (!(m<0 || m>src.rows - 1 || n<0 || n>src.cols - 1)) { // 该条件排除了窗口内的图像边界外部值 double w = exp(-(1.0f)* (((m - i) * (m - i) + (n - j) * (n - j)) / (2.0f*sigma_s*sigma_s))); double w_r = exp(-(1.0f)* (pow((double)(src.at<Vec3b>(i, j)[2] - src.at<Vec3b>(m, n)[2]), 2) / (2.0f*sigma_r*sigma_r))); double w_g = exp(-(1.0f)* (pow((double)(src.at<Vec3b>(i, j)[1] - src.at<Vec3b>(m, n)[1]), 2) / (2.0f*sigma_r*sigma_r))); double w_b = exp(-(1.0f)* (pow((double)(src.at<Vec3b>(i, j)[0] - src.at<Vec3b>(m, n)[0]), 2) / (2.0f*sigma_r*sigma_r))); fenmu_r += w * w_r; fenmu_g += w * w_g; fenmu_b += w * w_b; fenzi_r += w * w_r*(double)src.at<Vec3b>(m, n)[2]; fenzi_g += w * w_g*(double)src.at<Vec3b>(m, n)[1]; fenzi_b += w * w_b*(double)src.at<Vec3b>(m, n)[0]; } } } dst.at<Vec3b>(i, j)[2] = (double)fenzi_r / (double)fenmu_r; dst.at<Vec3b>(i, j)[1] = (double)fenzi_g / (double)fenmu_g; dst.at<Vec3b>(i, j)[0] = (double)fenzi_b / (double)fenmu_b; } }
该部分为整个程序的主体部分。在该部分中,遍历图像的每一点,再在内部遍历以该点为中心点的窗口内部所有点。直接用公式求出每一点相对中心点的空间域的值,然后分为RGB三个通道求出像素域值。直接用分子、分母作为变量名,求出三个通道的所有需要的分子分母。在窗口循环结束后,直接作除法并赋值给目标输出图像即可。
成果展示

(原始图像)

(双边滤波处理图像,σs = 5,σr = 20)
如果您觉得阅读本文对您有帮助,请点一下“推荐”按钮,您的“推荐”将是我最大的写作动力!欢迎各位转载,但是未经作者本人同意,转载文章之后必须在文章页面明显位置给出作者和原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号