
【计算摄影学】高斯滤波的简单实现
概念
通常我们认为图像像素之间的相关性随着距离增加应该不断减弱,但是均值滤波并没有体现这一性质。在对图像进行均值滤波时,如果图像中有一些很显著的亮点,滤波后它的周围会形成光斑。这正是因为均值滤波无视了距离,对很远处的像素依旧采用同样的权重导致的。一些场合,我们为了美感会需要这种效果。另一些场合,这种结果是不利的,特别是在做图像处理时。因此我们引入了具有距离权重的高斯滤波。
通常而言,高斯函数可以分为一维和二维,一维高斯函数更广为人知,其就是正态分布的表达式。而二维高斯滤波则具有和一维相似的性质:
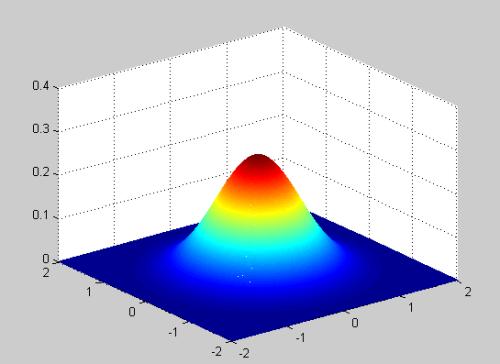
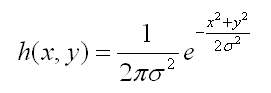
由二维高斯函数的图形,我们很容易看出,若用其作为卷积核,那么越靠近中心的像素相关性越大。在进行高斯滤波时,就是将二维高斯函数作为卷积核,对图像进行滑窗卷积。二维高斯函数的表达式如下:
毫无疑问,卷积核通常是奇数长宽的窗口,以便于确定中心。高斯滤波的卷积核一般采用正方形,3 × 3或5 × 5甚至更大。由于高斯函数的高度对称性,取正方形作为卷积核是不难理解的。在本实验中,我们将高斯函数的卷积核大小设置为:

下面我们以3 × 3大小的卷积核为例,介绍具体如何求取卷积核的数值。在模板的各个位置的坐标如下图所示(x轴水平向右,y轴竖直向上):
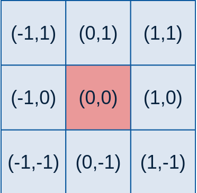
这样,将各个位置的坐标(x,y)代入到高斯函数G中,得到的每个值按照位置排列,就得到了模板。
例如:生成高斯核为3 × 3,σ = 0.8的模板:
| 0.057118 | 0.12476 | 0.057118 |
| 0.12476 | 0.2725 | 0.12476 |
| 0.057118 | 0.12476 | 0.057118 |
从以上描述中我们可以看出,高斯滤波模板中最重要的参数就是高斯分布的标准差σ。它代表着数据的离散程度,如果σ较小,那么生成的模板中心系数越大,而周围的系数越小,这样对图像的平滑效果就不是很明显;相反,σ较大时,则生成的模板的各个系数相差就不是很大,比较类似于均值模板,对图像的平滑效果就比较明显。
理论分析
求解图像的高斯滤波与均值滤波的步骤相似,可以分为如下几步:
- 读取原始图像
- 求出高斯滤波的卷积核
- 利用 filter2D 函数进行卷积操作
- 写入高斯滤波后的图像
高斯滤波与均值滤波对比,主要的不同在于第二步求解卷积核,相比而言高斯滤波卷积核的求解稍微复杂一些。
实验细节
1、卷积核的求取
// 初始化高斯卷积核 kernel = Mat::ones(kHeight, kWidth, CV_32F); // 找到高斯核的中心点 // 注意该中心点是以0开头,10σ结尾的中心点 int center = floor(5 * sigma); // 遍历Mat,求值 for (int i = 0; i < kHeight; i++) { for (int j = 0; j < kWidth; j++) { // 坐标(i,j)对应的高斯坐标系中的坐标为(i - center, center - j) double x = i - center; double y = center - j; kernel.at<float>(i, j) = 1.0f / (2.0f * pi*sigma*sigma)*exp(-(1.0f)* ((x * x + y * y) / (2.0f*sigma*sigma))); cout << kernel.at<float>(i, j) << "\t\t"; } cout << endl; }
代码如上,由用户输入的σ,上面又规定了卷积核的大小,因此很容易确定卷积核的中心为:

在真实的代码环境中,由于下标默认为0开始,因此卷积核的中心可以将最后的+1去掉。此时,将该中心设置为原点(0,0),对整个Mat进行遍历,对于掩膜矩阵中的每一个点(i,j),其在高斯坐标系中对应的(x,y)坐标为(i - center,center - j),直接套用高斯函数的公式即可求解出掩膜中每一个点的数值。这样就得到了我们想要的高斯卷积核。
2、利用 filter2D 函数进行卷积操作
与均值滤波类似,直接用filter2D进行卷积操作即可:
Point anchor(-1, -1); //中间的点 int depth = -1; //深度和输入一样 int delta = 0; //在处理之后 再加上delta,默认0 filter2D(src, dst, depth, kernel, anchor, delta);
结果展示

(原始图像)

(高斯滤波输出图像,取σ = 0.8)
最后附上完整代码:
#include<opencv2/opencv.hpp> #include<iostream> using namespace std; using namespace cv; #define pi 3.1415926535 int main() { Mat src, dst; Mat kernel; string image_name; string output_name; int kHeight, kWidth, img_height, img_width; double sigma; cout << "请输入需要读取的图像名称:"; cin >> image_name; cout << "请输入输出的图像名称:"; cin >> output_name; cout << "请输入需要的sigma:"; cin >> sigma; // 进行初始判断 src = imread(image_name, IMREAD_COLOR); if (src.empty()) { cout << "图像读取失败!" << endl; return 0; } else { // 若读取成功,判断卷积核的大小与图像大小的关系 kHeight = 2 * floor(5 * sigma) + 1; kWidth = 2 * floor(5 * sigma) + 1; img_height = src.rows; img_width = src.cols; if (img_height < kHeight || img_width < kWidth) { cout << "卷积核大小超过图像大小!" << endl; return 0; } } // 初始化高斯卷积核 kernel = Mat::ones(kHeight, kWidth, CV_32F); // 找到高斯核的中心点 // 注意该中心点是以0开头,10σ结尾的中心点 int center = floor(5 * sigma); // 遍历Mat,求值 for (int i = 0; i < kHeight; i++) { for (int j = 0; j < kWidth; j++) { // 坐标(i,j)对应的高斯坐标系中的坐标为(i - center, center - j) double x = i - center; double y = center - j; kernel.at<float>(i, j) = 1.0f / (2.0f * pi*sigma*sigma)*exp(-(1.0f)* ((x * x + y * y) / (2.0f*sigma*sigma))); cout << kernel.at<float>(i, j) << "\t\t"; } cout << endl; } Point anchor(-1, -1); //中间的点 int depth = -1;//深度和输入一样 int delta = 0; //在处理之后 再加上delta,默认0 filter2D(src, dst, depth, kernel, anchor, delta); imshow("高斯滤波", dst); imwrite(output_name, dst); waitKey(0); }
如果您觉得阅读本文对您有帮助,请点一下“推荐”按钮,您的“推荐”将是我最大的写作动力!欢迎各位转载,但是未经作者本人同意,转载文章之后必须在文章页面明显位置给出作者和原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号