有关随体导数的补充:随体导数
首先推导微分形式的动量方程
取一跟随流体运动的正六面体形微团,应用牛顿第二定律
\[\vec{F}=m\vec{a}=\rho\text{dxdydz}\frac{\text{D}\vec{V}}{\text{D}t}
\]
流体微团所受的力可以分为体积力和表面力
\[\vec{F}=\vec{F}_{\mathrm{body}}+\vec{F}_{\mathrm{surface}}
\]
其中的体积力可以用单位质量的体积力与流体微团质量的乘积表示如下
\[\vec{F}_{\mathrm{body}}=\vec{f}_{\mathrm{b}}\rho\mathrm{d}x\mathrm{d}y\mathrm{d}z
\]
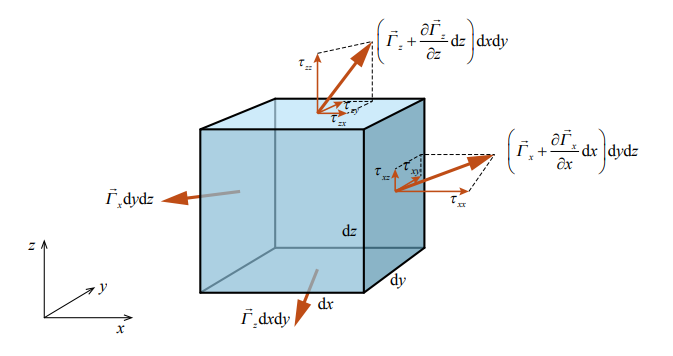
表面力更加复杂一些,下面我们来分析流体微团六个面上的表面力,图中为了清晰,只表示出了与 x 轴和 z 轴垂直的两对面上的表面力,体积 力和与 y 轴垂直的一对面上的表面力都未画出。
约定取拉力为正,压力为负。
与 x 轴垂直的两个面中,左侧面上的表面力为表面应力与面积的乘积,若用\(\vec{{\Gamma}_{x}}\)表示这个表面应力,则左侧面的表面力为
\[\vec{F}_{\mathrm{s,left}}=\vec{\Gamma}_{x}\mathrm{d}y\mathrm{d}z
\]
右侧面的表面力可以表示为
\[\vec{F}_\mathrm{s,right}=\Bigg(\vec{\Gamma}_x+\frac{\partial\vec{\Gamma}_x}{\partial x}\mathrm{d}x\Bigg)\mathrm{d}y\mathrm{d}z
\]
这两个面的表面力的合力为
\[\vec{F}_{\mathrm{s,right}}-\vec{F}_{\mathrm{s,left}}=\left(\vec{\Gamma}_x+\frac{\partial\vec{\Gamma}_x}{\partial x}\mathrm{d}x\right)\mathrm{d}y\mathrm{d}z-\vec{\Gamma}_{_x}\mathrm{d}y\mathrm{d}z=\frac{\partial\vec{\Gamma}_x}{\partial x}\mathrm{d}x\mathrm{d}y\mathrm{d}z
\]
同理,另外两对平面上表面力的合力分别为
\[\frac{\partial\vec{\Gamma}_y}{\partial y}\mathrm{d}x\mathrm{d}y\mathrm{d}z,\quad\frac{\partial\vec{\Gamma}_z}{\partial z}\mathrm{d}x\mathrm{d}y\mathrm{d}z
\]
流体微团六个面上所有表面力的合力为
\[\vec{F}_\mathrm{surface}=(\frac{\partial\vec{\Gamma}_x}{\partial x}+\frac{\partial\vec{\Gamma}_y}{\partial y}+\frac{\partial\vec{\Gamma}_z}{\partial z})\mathrm{d}x\mathrm{d}y\mathrm{d}z
\]
将体积力和表面力的表达式带回一开始的牛顿第二定律中
就得到了针对流体微团的应力形式的动量方程
\[\dfrac{\mathrm{D}\vec{V}}{\mathrm{D}t}=\vec{f}_\mathrm{b}+\dfrac{1}{\rho}\Bigg(\dfrac{\partial\vec{\Gamma}_x}{\partial x}+\dfrac{\partial\vec{\Gamma}_y}{\partial y}+\dfrac{\partial\vec{\Gamma}_z}{\partial z}\Bigg)
\]
物理意义:
- 左侧为流体微团单位质量的动量变化(即加速度)
- 右侧第一项为单位质量流体所受的体积力
- 右侧第二项为单位质量流体所受的表面力
要想应用动量方程解决问题,就要将其中的表面力表达成跟流动有关的形式
从图可知,任一表面应力可以分解成 3 个应力分量,包含一个正应力和两个切应力
\[\begin{gathered}
\vec{\Gamma}_{x} =\tau_{xx}\vec{i}+\tau_{xy}\vec{j}+\tau_{xz}\vec{k} \\
\vec{\Gamma}_{y} =\tau_{yx}\vec{i}+\tau_{yy}\vec{j}+\tau_{yz}\vec{k} \\
\vec{\Gamma}_{z} =\tau_{zx}\vec{i}+\tau_{zy}\vec{j}+\tau_{zz}\vec{k}
\end{gathered}\]
\(\tau\)代表表面应力分量,其下标中的第一个字母代表应力作用的 表面,第二个字母代表应力的作用方向
将应力的分量形式代入应力形式的动量方程中, 得到应力分量形式的动量方程如下:
\[\begin{aligned}
\frac{\mathrm{D}\bar{V}}{\mathrm{D}t} =\vec{f}_{\flat}+\frac{1}{\rho}(\frac{\partial\tau_{xx}}{\partial x}+\frac{\partial\tau_{yx}}{\partial y}+\frac{\partial\tau_{zx}}{\partial z})\vec{i} \\
+\frac{1}{\rho}(\frac{\partial\tau_{xy}}{\partial x}+\frac{\partial\tau_{yy}}{\partial y}+\frac{\partial\tau_{zy}}{\partial z})\vec{j} \\
+\frac{1}{\rho}(\frac{\partial\tau_{xz}}{\partial x}+\frac{\partial\tau_{yz}}{\partial y}+\frac{\partial\tau_{zz}}{\partial z})\vec{k}
\end{aligned}\]
用张量来表示更为简洁
\[\frac{\mathrm{d}u_\mathrm{i}}{\mathrm{d}t}=f_\mathrm{b,i}+\frac{1}{\rho}(\frac{\partial\tau_\mathrm{ji}}{\partial x_\mathrm{j}})
\]
上式最早是由纳维(Claude-Louis Navier,1785—1836)和 泊 松 (Simeon-Denis Poisson,1781—1840)推导出来的。
可以证明 9 个应力分量存在如下关系
\[\tau_{xy}=\tau_{yx},\tau_{yz}=\tau_{zy},\tau_{zx}=\tau_{xz}
\]
因此,应力分量一共有 6 个独立的变量
实际上在此之前的 1755 年,欧拉就给出了流体的运动方程。欧拉认为流体的粘性力相比压力是非常小的,所以应该可以忽略切应力,并让正应力等于压力,用公式表示出来就是:
\[\begin{array}{l}\tau_{xy}=\tau_{yx}=0,\tau_{yz}=\tau_{zy}=0,\tau_{zx}=\tau_{xz}=0\\\\\tau_{xx}=\tau_{yy}=\tau_{zz}=-p\end{array}
\]
把上面的关系式代入应力分量形式的动量方程
\[\left.{\frac{\mathrm{D}\bar{V}}{\mathrm{D}t}}=\vec{f}_{\mathrm{b}}-{\frac{1}{\rho}}\nabla p\right.
\]
这就是无粘流动的动量方程,因为是欧拉最早给出的,所以一般称为欧拉方程。
在欧拉方程中,左端项是单位质量流体动量的改变,右端第一项是体积力,右端第二项是压差力。
物理意义:当流动为无粘时,流体的动量改变只由两种力产生,体积力和压差力。
对于静止的流体,其内部自然没有粘性力,而且流体也没有动量的变化,可以简化得
\[\left.{\frac{1}{\rho}}\nabla p=\vec{f}_{\mathrm{b}}\right.
\]
这就是欧拉静平衡方程
对于有粘性的流动,还是需要解决应力分量形式的动量方程中应力的问题
回顾牛顿内摩擦定律:
\[\tau=\mu\frac{\partial u}{\partial y}
\]
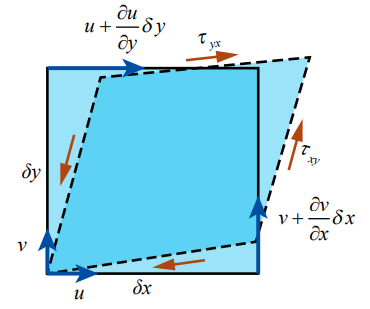
流体微团的变形及剪切力
当流动不是平行流动时, 这个剪切力不止与 x 方向的速度 u 的变化有关,还与 y 方向的速度 v 的变化有关。
对于上图所示的一般情况的剪切流动,可以证明,牛顿流体的剪切力的表达式为
\[\begin{aligned}\tau_{yx}&=\tau_{xy}=\mu(\frac{\partial u}{\partial y}+\frac{\partial\nu}{\partial x})\\\\\tau_{zy}&=\tau_{yz}=\mu(\frac{\partial\nu}{\partial z}+\frac{\partial w}{\partial y})\\\\\tau_{xz}&=\tau_{zx}=\mu(\frac{\partial w}{\partial x}+\frac{\partial u}{\partial z})\end{aligned}
\]
正应力不像切应力那样容易得到,可以证明正应力并不只是压力,粘性也产 生一部分正应力,否则微元体就不满足力的平衡关系了
以下关系式最早是由斯托克斯(George G. Stokes,1819—1903)得出的
\[\begin{gathered}
\tau_{xx} =2\mu\frac{\partial u}{\partial x}-\frac23\mu\left(\nabla\cdot\vec{V}\right)-p \\
\tau_{yy} =2\mu\frac{\partial\nu}{\partial y}-\frac23\mu\left(\nabla\cdot\vec{V}\right)-p \\
\tau_{zz} =2\mu\frac{\partial w}{\partial z}-\frac23\mu\left(\nabla\cdot\vec{V}\right)-p
\end{gathered}\]
流体微团所受的正应力包含粘性力的贡献,以\(\tau_{xx}\)为例,其中的粘性正应力为
\[\tau_{\mathrm{viscous},xx}=2\mu\frac{\partial u}{\partial x}-\frac{2}{3}\mu\left(\nabla\cdot\vec{V}\right)=\frac{4}{3}\mu\frac{\partial u}{\partial x}-\frac{2}{3}\mu\frac{\partial\nu}{\partial y}-\frac{2}{3}\mu\frac{\partial w}{\partial z}
\]
对于不可压缩流动,\(\nabla\cdot\vec{V}=0\),粘性正应力与 x 方向的伸长率\(\partial u / \partial x\)成正比,对于可压缩流动,粘性正应力还与体积变化相关。但即使是对于一般的可压缩流动,体积变化引起的粘性力也要小于伸长引起的粘性力,所以常常直接忽略掉这一项,而将粘性正应力直接写为
\[\tau_{\text{viscous,}xx}=2\mu\frac{\partial u}{\partial x}
\]
可见,多数情况下粘性正应力都是正的,也就是体现为拉力,在牛顿流体中, 粘性正应力几乎总是远远小于压力,所以基本上可以忽略。
上述各应力分量的方程是牛顿流体在任意流动状态下的应力与应变率的关系,是牛顿流体的本构方程,又被称为广义牛顿内摩擦定律
牛顿流体的本构方程中,9 个应力构成一个二阶张量:
\[\left.\Gamma_{\mathrm{ij}}=\left[\begin{array}{c}\tau_{\mathrm{ij}}\\\end{array}\right.\right]=\left[\begin{array}{ccc}\tau_{xx}&\tau_{xy}&\tau_{xz}\\\tau_{yx}&\tau_{yy}&\tau_{yz}\\\tau_{zx}&\tau_{zy}&\tau_{zz}\\\end{array}\right]
\]
包含应变率的 9 个流动分量也构成一个二阶张量,表示为
\[D_{\mathrm{ij}}=\begin{bmatrix}d_{\mathrm{ij}}\end{bmatrix}=\begin{bmatrix}\frac{\partial u}{\partial x}&\frac{\partial u}{\partial y}&\frac{\partial u}{\partial z}\\\frac{\partial\nu}{\partial x}&\frac{\partial\nu}{\partial y}&\frac{\partial\nu}{\partial z}\\\frac{\partial w}{\partial x}&\frac{\partial w}{\partial y}&\frac{\partial w}{\partial z}\end{bmatrix}
\]
将牛顿流体的本构方程代入应力形式的动量方程中,就可以得到最终形式的动量方程:
\[{\frac{\mathrm{D}\vec{V}}{\mathrm{D}t}}={\vec{f}}_{\mathrm{b}}-{\frac{1}{\rho}}\nabla p+{\frac{\mu}{\rho}}\nabla^{2}\vec{V}+{\frac{1}{3}}{\frac{\mu}{\rho}}\nabla(\nabla\cdot\vec{V})
\]
该式称为纳维—斯托克斯(Navier-Stokes)方程,简称 N-S 方程。其中各项的物理意义非常明确,分别列出如下:
- \({\frac{\mathrm{D}\vec{V}}{\mathrm{D}t}}\) 流体的动量随时间的变化,或称之为惯性力项
- \({\vec{f}}_{\mathrm{b}}\) 体积力项
- \(-{\frac{1}{\rho}}\nabla p\) 压差力项
- \({\frac{\mu}{\rho}}\nabla^{2}\vec{V}+{\frac{1}{3}}{\frac{\mu}{\rho}}\nabla(\nabla\cdot\vec{V})\) 粘性力项
N-S 方程的展开形式可以写为
\[\begin{gathered}
\rho\frac{\partial u}{\partial t}+\rho u\frac{\partial u}{\partial x}+\rho v\frac{\partial u}{\partial y}+\rho w\frac{\partial u}{\partial z}=\rho f_{\mathrm{b,x}}-\frac{\partial p}{\partial x}+2\frac{\partial}{\partial x}\bigg(\mu\frac{\partial u}{\partial x}\bigg) \\
-\frac{2}{3}\frac{\partial}{\partial x}\bigg[\mu\bigg(\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z}\bigg)\bigg]+\frac{\partial}{\partial y}\bigg[\mu\bigg(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x}\bigg)\bigg]+\frac{\partial}{\partial z}\bigg[\mu\bigg(\frac{\partial w}{\partial x}+\frac{\partial u}{\partial z}\bigg)\bigg]
\end{gathered}\]
\[\begin{gathered}
\rho\frac{\partial v}{\partial t}+\rho u\frac{\partial v}{\partial x}+\rho v\frac{\partial v}{\partial y}+\rho w\frac{\partial v}{\partial z}=\rho f_{\mathrm{b},y}-\frac{\partial p}{\partial y}+2\frac{\partial}{\partial y}\Bigg(\mu\frac{\partial v}{\partial y}\Bigg) \\
-\frac{2}{3}\frac{\partial}{\partial y}\Bigg[\mu\Bigg(\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z}\Bigg)\Bigg]+\frac{\partial}{\partial z}\Bigg[\mu\Bigg(\frac{\partial w}{\partial y}+\frac{\partial v}{\partial z}\Bigg)\Bigg]+\frac{\partial}{\partial x}{\Bigg[\mu\Bigg(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x}\Bigg)\Bigg]}
\end{gathered}\]
\[\begin{gathered}
\rho{\frac{\partial w}{\partial t}}+\rho u{\frac{\partial w}{\partial x}}+\rho v{\frac{\partial w}{\partial y}}+\rho w{\frac{\partial w}{\partial z}}=\rho f_{\mathrm{b},z}-{\frac{\partial p}{\partial z}}+2{\frac{\partial}{\partial z}}{\Bigg(}\mu{\frac{\partial w}{\partial z}}{\Bigg)} \\
-\frac{2}{3}\frac{\partial}{\partial z}\bigg[\mu\bigg(\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z}\bigg)\bigg]+\frac{\partial}{\partial x}\bigg[\mu\bigg(\frac{\partial w}{\partial x}+\frac{\partial u}{\partial z}\bigg)\bigg]+\frac{\partial}{\partial y}\bigg[\mu\bigg(\frac{\partial w}{\partial y}+\frac{\partial v}{\partial z}\bigg)\bigg]
\end{gathered}\]
其不易求解的主要原因是: 由于采用了欧拉坐标系,其中的对流加速度是非线性的。实际上粘性力项也应该 是非线性的。
在实际应用中,只要流体不是处于强压缩(如强激波内部)流动,N-S 方程的最后一项就可以忽略,因此很多书上的 N-S 方程直接写成如下形式:
\[\dfrac{\text{D}\vec{V}}{\text{D}t}=\vec{f}_\text{b}-\dfrac{1}{\rho}\nabla p+\dfrac{\mu}{\rho}\nabla^2\vec{V}
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号