随笔分类 - 位姿估计
摘要: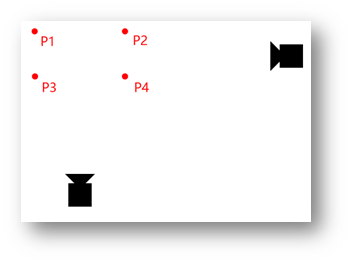 根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。
阅读全文
根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。
阅读全文
根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。
阅读全文
摘要: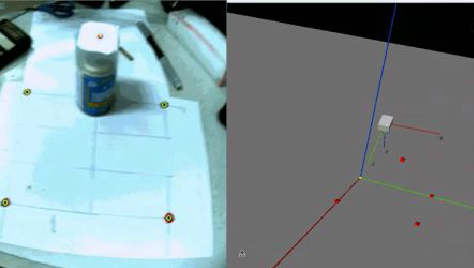 本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。
阅读全文
本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。
阅读全文
本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。
阅读全文
摘要:关键词:OpenCV::solvePnP 文章类型:方法封装、测试 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-27 @Lab: CvLab202@CSU 前言 今天给大家带来的是一篇关于程序功能、性能测试的文章,读过《相机位姿估计1:根据四个
阅读全文
摘要:关键词:位姿估计 OpenCV::solvePnP 用途:各种位姿估计 文章类型:原理、流程、Demo示例 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-18 @Lab: CvLab202@CSU 目录 《相机位姿估计0:基本原理之如何解PNP问
阅读全文
摘要:关键词:相机位姿估计 PNP问题求解 用途:各种位姿估计 文章类型:原理 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-18 @Lab: CvLab202@CSU 目录 《相机位姿估计0:基本原理之如何解PNP问题》 《相机位姿估计1:根据四个特
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号