摘要:
自己编译 ARM 版 opencv-mobile 解决编译器版本导致的 undefined reference to std::__cxx11::basic_stringstream 问题 起因 因项目需要在 arm 版中进行简单的图形运算,于是打算直接用 opencv-mobile 仓库预编译好的 阅读全文
posted @ 2022-05-18 16:37
V·Shawn
阅读(1767)
评论(0)
推荐(0)
 上星期趁着论文提交的空挡,把一直拖着的一个小项目开了个头,其实是朋友有个外快小项目要做,具体内容不说,项目的基础是XY平台的视觉控制,因此在前期研究中主要要做平台选型、控制购买、接线研究、模拟实验等工作,这里记述下来以防忘记,顺便也给其他人做个参考。
本次控制通过相机采集图像,以此为反馈信号做控制,使平台上的某个点位移到指定的位置。然后本文写得更像随笔形式,内容可能有点杂乱,见谅了。 阅读全文
上星期趁着论文提交的空挡,把一直拖着的一个小项目开了个头,其实是朋友有个外快小项目要做,具体内容不说,项目的基础是XY平台的视觉控制,因此在前期研究中主要要做平台选型、控制购买、接线研究、模拟实验等工作,这里记述下来以防忘记,顺便也给其他人做个参考。
本次控制通过相机采集图像,以此为反馈信号做控制,使平台上的某个点位移到指定的位置。然后本文写得更像随笔形式,内容可能有点杂乱,见谅了。 阅读全文
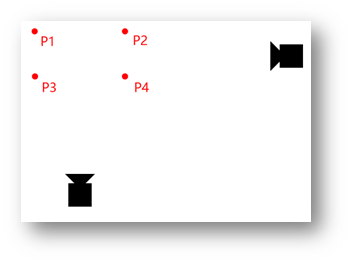 根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。 阅读全文
根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。 阅读全文
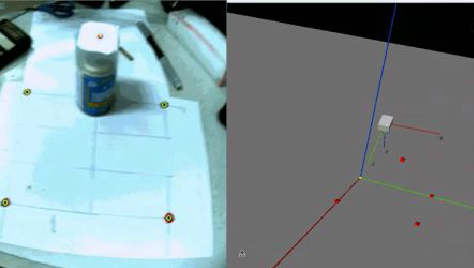 本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。 阅读全文
本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。 阅读全文
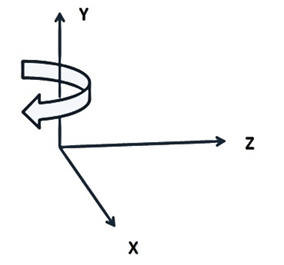 本文主要介绍在空间坐标系下,某一点绕xyz三个轴的旋转公式,以及某点绕任意轴旋转的公式,所有公式都有提供相应的C++代码,方便大家快速调用。 阅读全文
本文主要介绍在空间坐标系下,某一点绕xyz三个轴的旋转公式,以及某点绕任意轴旋转的公式,所有公式都有提供相应的C++代码,方便大家快速调用。 阅读全文
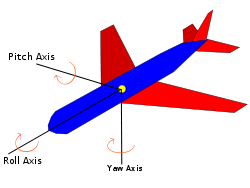 本文将告诉你当求出相机或者飞行器的旋转矩阵后,如何根据旋转矩阵,计算出x、y、z三个轴方向的旋转角度。 阅读全文
本文将告诉你当求出相机或者飞行器的旋转矩阵后,如何根据旋转矩阵,计算出x、y、z三个轴方向的旋转角度。 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号