
点云配准第7次课
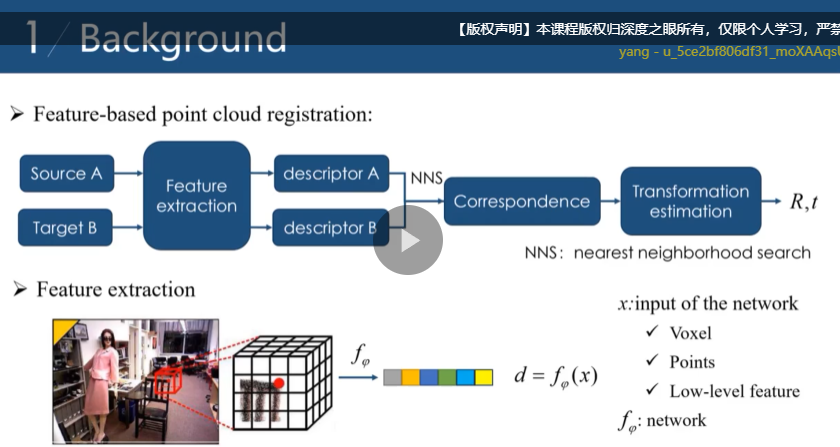
输入数据:
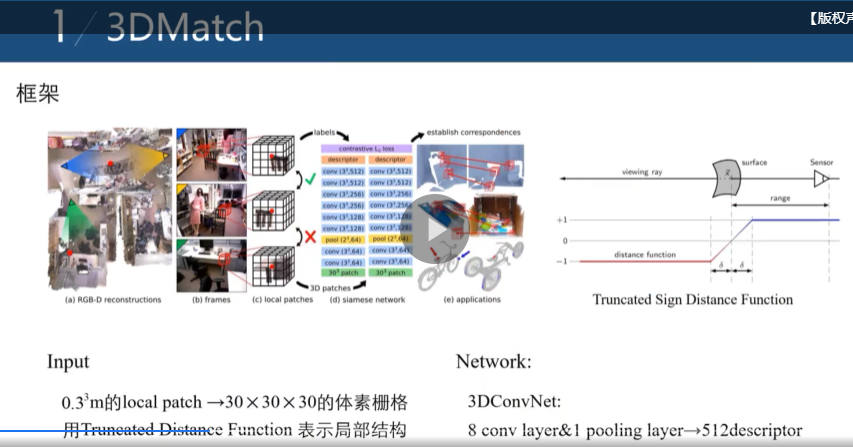
voxel 体素
points
low-level feature(容易造成信息丢失)
所以常用points作为输入数据
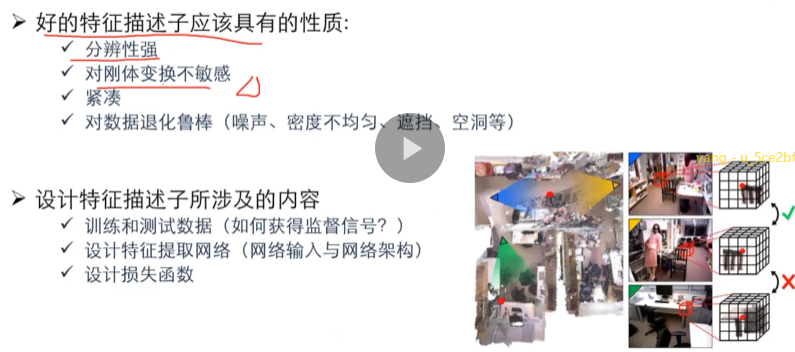
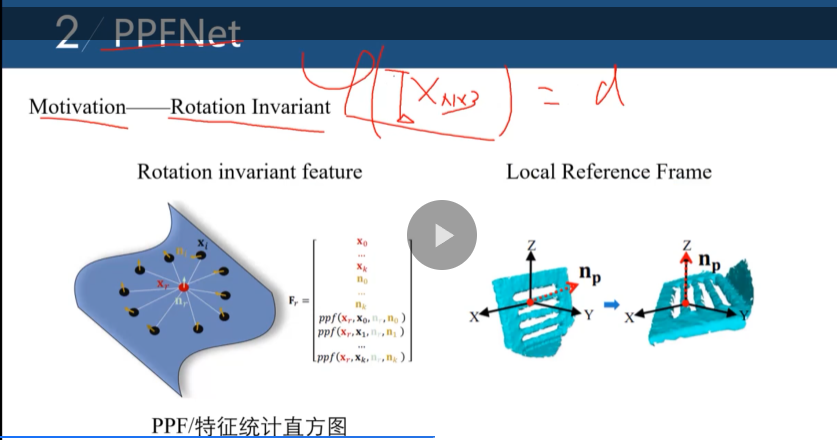
好的特征描述子:
分辨性强 对刚体变换不敏感 紧凑 (例如希望他的维度不要太高,例如32位或64位,有利于在下游匹配过程中加速匹配度提高效率,降低时间) 对数据退化鲁棒(如噪声(例如室外激光雷达数据)、密度不均匀、遮挡、空洞等)
设计特征描述子所涉及的内容
训练和测试数据(如何获得监督信号)
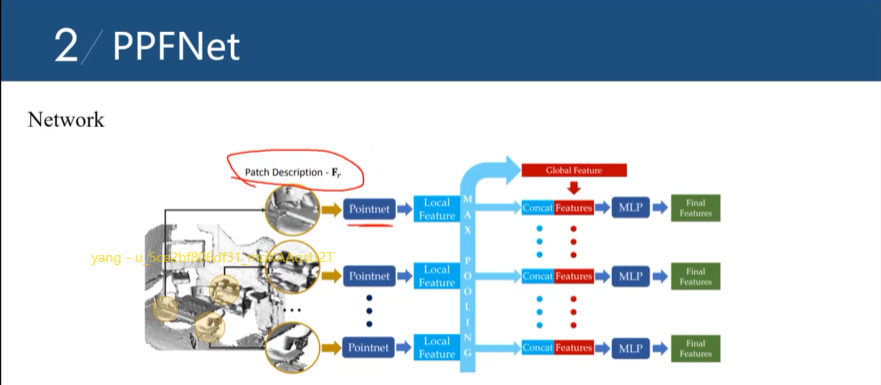
设计特征提取网络(网络输入与网络架构)
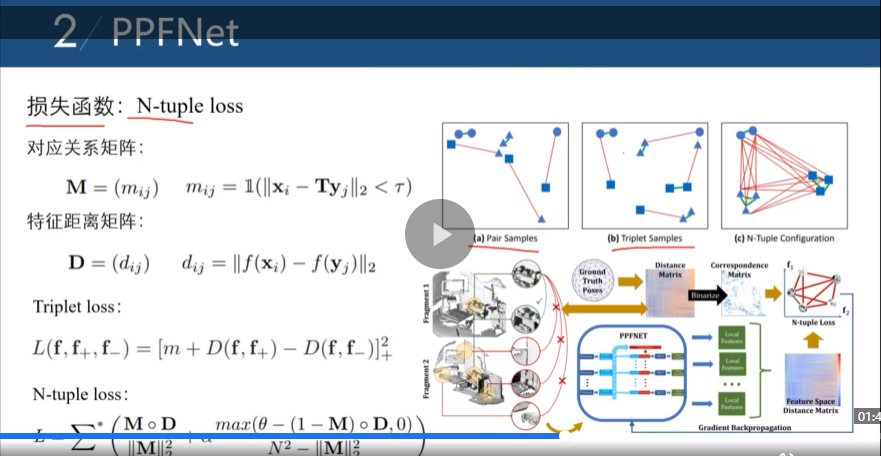
设计损失函数
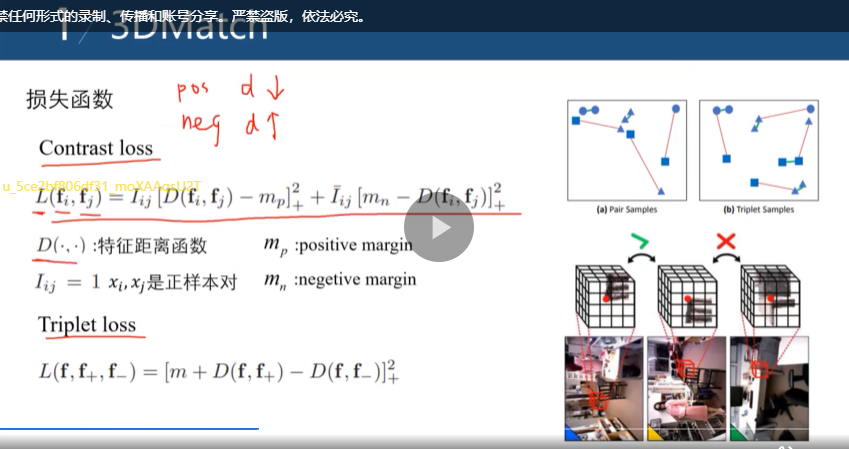
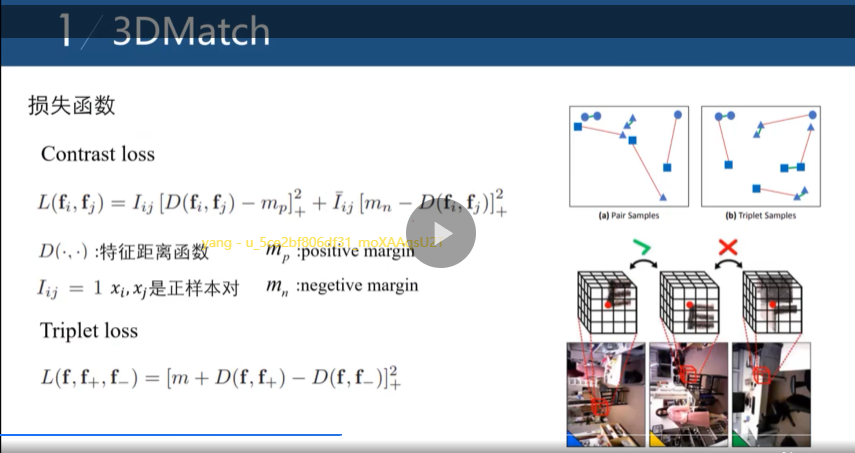
fi,fj表示特征函数,L表示损失,mp,mn分别是正负样本的两个参数,Iij=1说明xixj是正样本对,Iij=0,说明xi,xj是负样本对。 mn长设置为1.4,mp长设置危为0.1,加入有一个点fi,以fi为圆心画一个圆圈,希望正样本点尽可能放在圆圈内,希望负样本点大于该圆圈半径,即将尽可能远即大于1.4。
在triplet loss中同样也是希望正样本点距离尽可能近,负样本点距离尽可能远。 D(f,f+),表示到正样本点距离, D(f,f+)表示到负样本点距离。如果 D(f,f-)- D(f,f+)>m,说明 D(f,f-)和 D(f,f+)距离足够远, D(f,f-)- D(f,f+)<m,说明距离太近了,需要优化它。举例:如果 D(f,f+) =0.05, D(f,f+) =0.6,m=0.5,则L(f,f+,f_)=-0.05, 不需要优化它,而如果 D(f,f+) =0.3, D(f,f+) =0.6,m=0.5,则L(f,f+,f_)=-0.2,则需要继续优化。
对比损失考虑的是两个点之间的关系, triplet loss考虑的是三个样本点之间的关系。 此处老师说relu函数进行处理,如果为负数,则经过relu 处理后,它的影响就不大了。 在contrast loss 中,该函数要么取前面一项要么取后面一项。
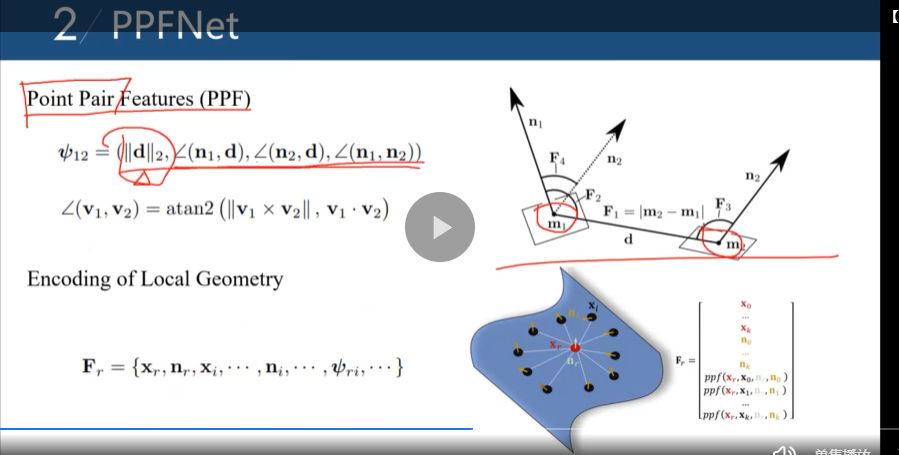
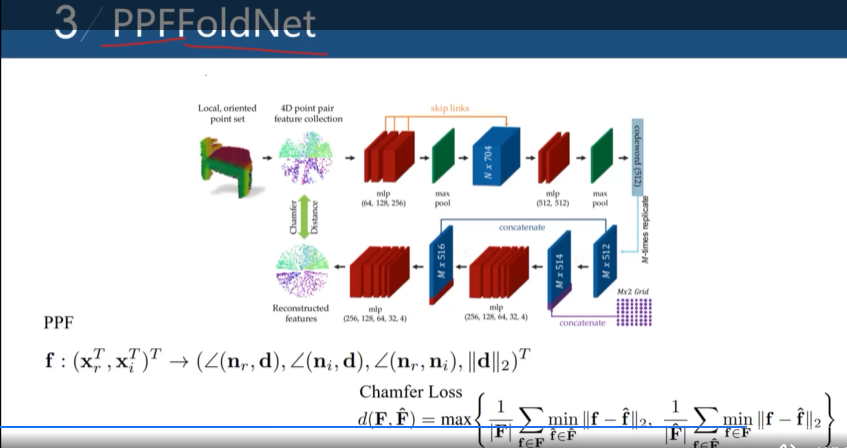
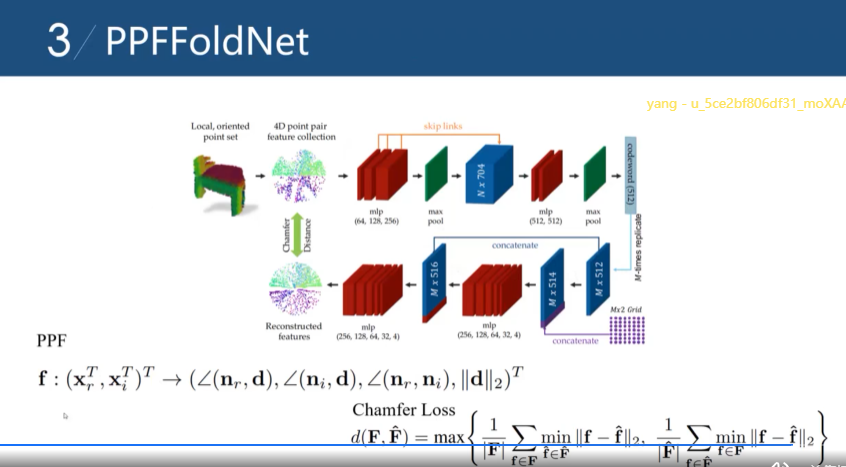
该论文利用度量损失函数基于卷积网络的特征提取的方法。以前通过手工方式考虑特征描述子,例如方向量,距离等,现在通过网络训练特征描述子。
该论文前面讲的是什么?
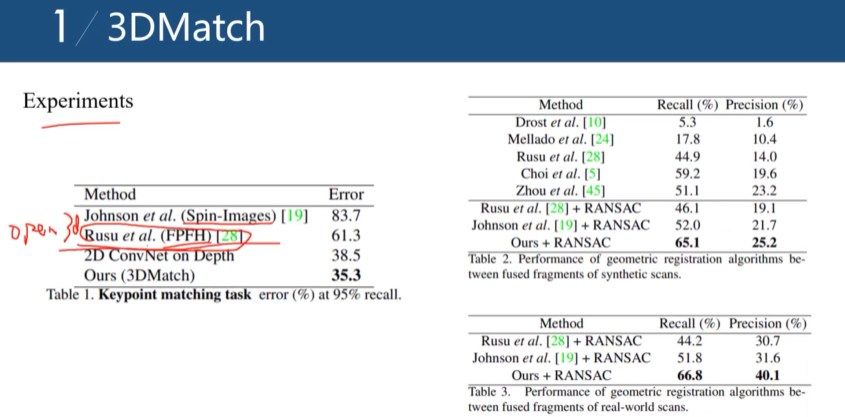
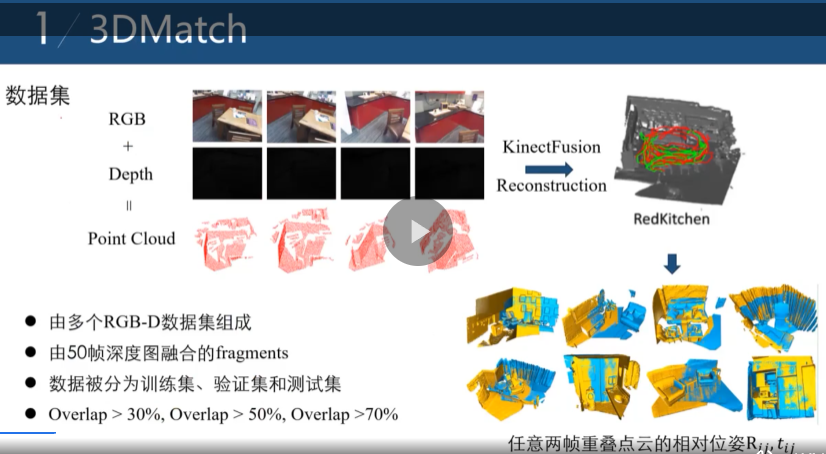
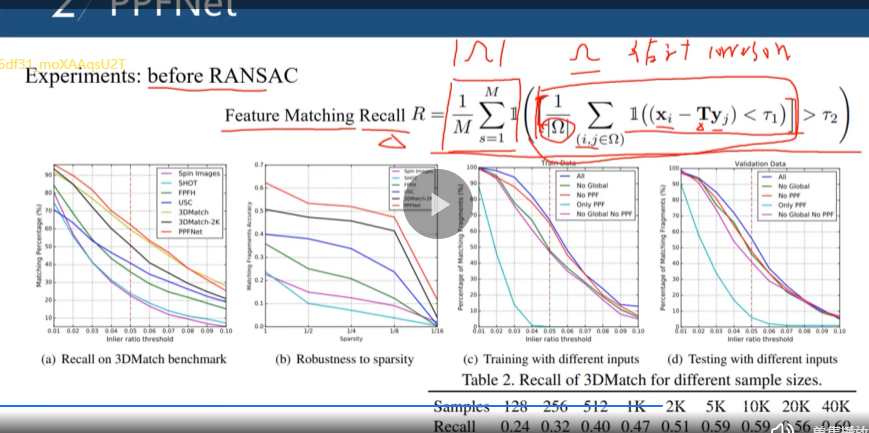
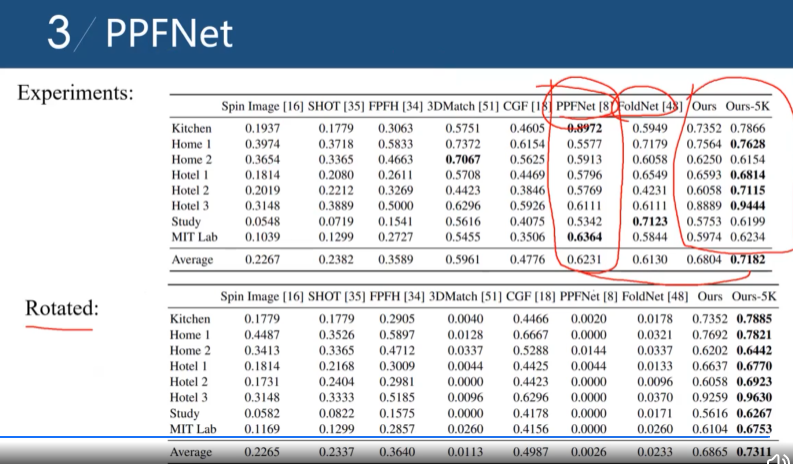
如图中3Dmatch的错误率相较更小。在右面上下图中,上面是对synthetic scan做数据集的到的实验结果。下面是在真实场景中得到的数据结果。
+
111111111

 浙公网安备 33010602011771号
浙公网安备 33010602011771号