
基于MATLAB实现动态矩阵控制(DMC)算法
一、DMC算法原理与流程
1. 核心组成模块
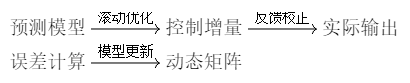
2. 算法流程
- 建立阶跃响应模型:通过阶跃实验获取对象动态特性
- 初始化参数:设置预测时域P、控制时域M、权重矩阵Q和λ
- 滚动优化循环: 预测未来P步输出 构建二次规划目标函数 求解最优控制增量
- 反馈校正:利用实际输出修正预测误差
二、MATLAB核心代码实现
%% 参数设置
clear; clc; close all;
% 系统参数
dt = 0.1; % 采样周期
K = 1; % 开环增益
T = 2; % 时间常数
sys = tf(K, [T 1]); % 传递函数模型
% DMC参数
N = 200; % 建模时域
P = 50; % 预测时域
M = 5; % 控制时域
q = 1; % 输出权重
lamda = 0.1; % 控制增量权重
h = 1; % 反馈校正系数
%% 模型辨识
a = step(sys, 0:dt:N); % 获取阶跃响应
%% 动态矩阵计算
A = zeros(P,M);
for i = 1:M
for j = i:P
A(j,i) = a(j-i+1);
end
end
% 控制律矩阵计算
Q = q * eye(P);
LAMDA = lamda * eye(M);
C = [1 zeros(1,M-1)]; % 控制增量约束矩阵
D = C * inv(A'*Q*A + LAMDA) * A'*Q;
%% 仿真循环
SimuSteps = 300; % 总仿真步数
y = zeros(SimuSteps,1); % 实际输出
u = zeros(SimuSteps,1); % 控制输入
y_sp = 1; % 设定值
for k = 1:SimuSteps
% 预测模型计算
y_pred = y(end) + a(1:P)' * u(end:-1:end-M+1);
% 反馈校正
e = y_sp - y_pred(1);
y_corr = y_pred + h * e;
% 控制增量计算
du = D * (y_corr(1:P)' - y(end:-1:end-M+1)');
% 应用控制量
u_new = u(end) + du(1);
y_new = simulate(sys, u_new, dt);
% 更新数据
u = [u; u_new];
y = [y; y_new];
end
%% 结果可视化
figure;
subplot(2,1,1);
plot(0:dt:dt*(SimuSteps-1), y, 'r', 'LineWidth',1.5);
hold on;
plot(0:dt:dt*(SimuSteps-1), y_sp*ones(SimuSteps,1), 'k--');
title('DMC控制效果');
xlabel('时间(s)'); ylabel('输出');
legend('实际输出', '设定值');
subplot(2,1,2);
stem(0:dt:dt*(SimuSteps-1), u, 'b', 'LineWidth',1.5);
title('控制量变化');
xlabel('时间(s)'); ylabel('控制量');
三、算法优化
1. 纯滞后补偿
% 添加Smith预估器
tau = 0.5; % 纯滞后时间
sys_lead = tf([tau 1],[1]); % 前馈补偿模型
2. 约束处理
% 输入约束处理
umin = 0; umax = 100;
du_min = umin - u(end);
du_max = umax - u(end);
du = max(min(du, du_max), du_min);
3. 在线参数整定
% 基于误差的自适应调整
error = y_sp - y_pred(1);
if error > 0.1
lamda = lamda * 0.9; % 增大权重
else
lamda = lamda * 1.1;
end
参考代码 MATLAB DMC算法 www.youwenfan.com/contentcnk/79267.html
四、应用
- 多变量控制:扩展为DMC-MIMO算法
- 非线性系统:结合神经网络补偿
- 实时控制:GPU加速实现
% GPU加速示例
a_gpu = gpuArray(a);
D_gpu = gpuArray(D);
du = gather(D_gpu * (y_corr(1:P)' - y(end:-1:end-M+1)'));

 浙公网安备 33010602011771号
浙公网安备 33010602011771号