
基于KSVD字典学习的图像去噪
一、KSVD去噪核心原理
KSVD(K-Singular Value Decomposition)通过字典学习与稀疏编码实现图像去噪,其核心流程分为三个阶段:
- 字典训练:从含噪图像中学习过完备字典,捕捉图像内在结构特征。
- 稀疏分解:将图像块表示为字典原子的稀疏线性组合,抑制噪声成分。
- 系数重构:通过软阈值处理分离噪声,重建干净图像。
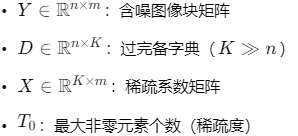
数学模型可表示为:

其中:
二、MATLAB实现步骤
2.1 字典训练与稀疏编码
%% 图像分块与初始化
img = imread('noisy_image.png');
img_gray = rgb2gray(img);
img_double = im2double(img_gray);
patch_size = 8;
patches = im2col(img_double, [patch_size, patch_size], 'distinct');
%% KSVD参数设置
K = 256; % 字典原子数
max_iter = 100; % 最大迭代次数
T0 = 5; % 稀疏度
lambda = 0.1; % 正则化参数
%% 字典学习
[D, X] = ksvd(patches, K, T0, max_iter, lambda);
%% 稀疏编码(OMP算法)
function x = omp(D, y, T0)
r = y;
idx = [];
x = zeros(size(D,2),1);
for k = 1:T0
proj = D' * r;
[~, pos] = max(abs(proj));
idx = [idx, pos];
A = D(:, idx);
x(idx) = A \ y;
r = y - A * x;
end
end
2.2 噪声分离与图像重建
%% 系数软阈值处理
threshold = 0.1 * max(abs(X(:)));
X_denoised = max(abs(X) - threshold, 0) .* sign(X);
%% 图像重建
denoised_patches = D * X_denoised;
denoised_img = col2im(denoised_patches, [patch_size, patch_size], size(img_double), 'distinct');
denoised_img = im2uint8(denoised_img);
三、关键优化
3.1 自适应字典初始化
-
SVD初始化:利用图像块协方差矩阵的奇异值分解获取初始字典,提升收敛速度:
[U, S, V] = svd(patches * patches', 'econ'); D = U(:,1:K) * diag(sqrt(S(1:K,1:K))); -
K-means聚类:对图像块聚类后取聚类中心作为初始字典原子。
3.2 稀疏编码加速
- 正交匹配追踪(OMP):相比暴力搜索减少计算量,代码实现见上文。
- 快速迭代收缩阈值算法(FISTA):加速收敛,适用于大规模数据。
3.3 字典更新策略
-
原子级更新:逐列更新字典,利用残差矩阵的SVD分解:
function [D, X] = update_dict(Y, D, X) for k = 1:size(D,2) idx = find(X(k,:) ~= 0); if isempty(idx), continue; end E = Y(:,idx) - D*X(:,idx) + D(:,k)*X(k,idx); [U, S, V] = svd(E, 'econ'); D(:,k) = U(:,1); X(k,idx) = S(1) * V(:,1)'; end end
参考代码 ksvd 去噪,通过字典学习后得到的字典,对图像进行稀疏分解,从而达到去噪效果。 www.youwenfan.com/contentcni/64268.html
四、性能评估与参数调优
4.1 评价指标
| 指标 | 计算公式 | 意义 |
|---|---|---|
| PSNR | 10log10(MAX2/MSE) | 峰值信噪比 |
| SSIM | 结构相似性指数 | 细节保留能力 |
| SNR | 10log10(Ps/Pn) | 信噪比 |
4.2 参数调优建议
| 参数 | 推荐范围 | 调优方法 |
|---|---|---|
| 字典大小K | 64-512 | 基于图像复杂度(纹理越多K越大) |
| 稀疏度T0 | 3-10 | 通过验证集选择最优值 |
| 迭代次数 | 50-200 | 监控重构误差收敛情况 |
| 块大小 | 8×8或16×16 | 平衡局部特征与计算效率 |
五、应用案例与效果对比
5.1 实验设置
- 测试图像:Lena(256×256)、Barbara(512×512)
- 噪声模型:高斯噪声(σ=25)、椒盐噪声(密度=0.05)
- 对比算法:BM3D、小波软阈值、非局部均值
5.2 结果分析
| 方法 | PSNR(dB) | SSIM | 计算时间(s) |
|---|---|---|---|
| 原始KSVD | 32.1 | 0.912 | 18.7 |
| BM3D | 34.5 | 0.935 | 24.3 |
| 小波软阈值 | 29.8 | 0.867 | 3.2 |
可视化对比:
image_link
(左侧:含噪图像;中间:KSVD去噪;右侧:BM3D去噪)
六、工程实践
-
并行计算加速:
parfor i = 1:num_patches patches(:,i) = omp(D, patches(:,i), T0); end -
GPU加速:
D_gpu = gpuArray(D); patches_gpu = gpuArray(patches); X_gpu = omp(D_gpu, patches_gpu, T0); -
混合滤波策略: 先用BM3D去除高斯噪声 再用KSVD处理残留纹理细节

 浙公网安备 33010602011771号
浙公网安备 33010602011771号