匀速贝塞尔曲线运动
就是沿着贝塞尔曲线匀速运动,相同时间走相同的曲线距离。
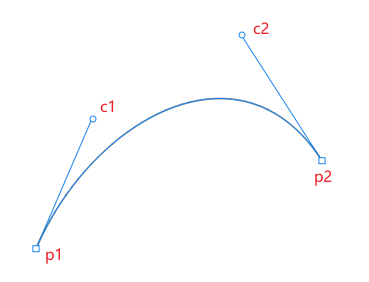
贝塞尔曲线公式
 ,其中p1为起点,p2为终点,c1为控制点1,c2为控制点2,变量t的范围为[0, 1]。
,其中p1为起点,p2为终点,c1为控制点1,c2为控制点2,变量t的范围为[0, 1]。
注意:这边的变量用t不是时间
public static Vector3 GetBezierPoint(Vector3 p1, Vector3 c1, Vector3 c2, Vector3 p2, float t) { float rest = (1f - t); // p1*(1-t)^3 + 3*c1*t*(1-t)^2 + 3 *c2*t^2*(1-t) * p2*t^3 Vector3 result = p1 * rest * rest * rest + 3 * c1 * t * rest * rest + 3f * c2 * t * t * rest + p2 * t * t * t; return result; }
上面公式的得到贝塞尔曲线上的一个点,那能计算出从p1以速度v=10沿着曲线运动1s后的点坐标么?
显然不能,这边还缺一个根据曲线长度计算出t的公式。有了t,只要代入函数B(t)就能算出点坐标了
根据曲线长度计算t的推导
1) 求出曲线长度公式
1-a) 先把贝塞尔曲线公式展开成A*t3 + B*t2 + C*t + D的形式
public static void BezierExpand(Vector3 p1, Vector3 c1, Vector3 c2, Vector3 p2, out Vector3 A, out Vector3 B, out Vector3 C, out Vector3 D) { A = -1 * p1 + 3 * c1 - 3 * c2 + p2; B = 3 * p1 - 6 * c1 + 3 * c2; C = -3 * p1 + 3 * c1; D = p1; }
1-b) 对函数Q(t)求导,得到的导函数Q'(t)可以用于求Q(t)在t处的变化率。(不知道怎么求导的,找关键字:幂函数求导或常见函数求导)
 ,导数Q'(t)的结果是一个向量(即两个点相减)
,导数Q'(t)的结果是一个向量(即两个点相减)
1-c) 利用微积分思想得到曲线长度公式
就是将曲线切分成超级多份,这样每一份就非常的小,可以近似的当做线段处理,然后把这些线段的长度相加,就是曲线长度。而导数做的就是计算每一份的大小,所以曲线长度公式:
 ,因为Q'(x)的结果是一个向量,VecLen表示求向量的长度。
,因为Q'(x)的结果是一个向量,VecLen表示求向量的长度。
1-d) L(t)是一个积分公式,求积分的方法很多,有:基本积分法,换元积分法,分部积分法,数值积分法等。
这边的话使用数值积分法中的Gauss-Legendre求积公式来求积分:

其中n表示积分点数量,n与wi 、xi的取值可以通过查表获得,都是预计算好的(Gaussian Quadrature Weights and Abscissae),n取得越大精度越高,但计算量也相应变大,这边的话用10;
a对应变量t的下限0,b对应变量t;f(t)对应VecLen(Q'(x)),所以最终曲线长度公式:

// 曲线公式一阶导数, 对应Q'(t) public Vector3 GetPointDer(float t) { return 3.0f * A * t * t + 2.0f * B * t + C; } // 获取曲线长度, 对应L(t) public float GetArcLength(float t) { var halfT = t / 2.0f; float sum = 0f; foreach (var wx in gaussWX) { var w_i = wx[0]; var x_i = wx[1]; sum += w_i * GetPointDer(halfT * x_i + halfT).magnitude; } sum *= halfT; return sum; }
2) 根据曲线长度,求贝塞尔曲线公式的变量t的值
比如:曲线长度为5时,求出t的值,怎么求?
直接代入上面的公式,然后解出方程即可:

但是会发现上面的方程还挺复杂的,还又有累加,又有导数的,解这种复杂的方程,可以使用牛顿迭代法,公式为:
 ,其中xi+1表示本次迭代后的值,xi表示上次迭代的值,f(x)对应:L(t)-曲线长度参数
,其中xi+1表示本次迭代后的值,xi表示上次迭代的值,f(x)对应:L(t)-曲线长度参数
//用[0, 1]方式表示的曲线长度 public float T2NormalS(float t) { return GetArcLength(t) / arcLength; } //曲线长度函数导数/曲线长度 public float T2NormalSDer(float t) { return GetPointDer(t).magnitude / arcLength; } //根据曲线长度获取贝塞尔曲线公式的变量t public float S2T(float normalS) { const int NEWTON_SEGMENT = 4; //迭代次数 normalS = Mathf.Clamp01(normalS); float t = normalS; for (int i = 0; i < NEWTON_SEGMENT; i++) { t = t - (T2NormalS(t) - normalS) / T2NormalSDer(t); } return t; } //根据距离获取贝塞尔曲线上的点 public Vector3 GetPointByNormalS(float normalS) { float t = S2T(normalS); return GetPoint(t); }
其他
//获取曲线的切线 public static Vector3 GetBezierTangent(Vector3 p1, Vector3 c1, Vector3 c2, Vector3 p2, float t) { float rest = 1 - t; float sqr_t = t * t; float sqr_rest = rest * rest; // 3*A*t^2 + 2*B*t + C //A, B, C代入后: // 3*t^2*(-p1 + 3*c1 - 3*c2 + p2) = 3*t^2*p1 + -9*t^2*c1 + 9*t^2*c2 - 3*t^2*p2 // 2*t*(3*p1 - 6*c1 + 3*c2) = 6*t*p1 - 12*t*c1 + 6*t*c2 // -3*p1 + 3*c1 //合并下: // (-3*t^2 + 6*t - 3)*p1 = -3*(t^2 -2*t + 1)*p1 = -3*(t-1)^2*p1 // (9*t^2 - 12*t + 3)*c1 = 3*(3*t^2 - 4*t + 1)*c1 = 3*((1-t)^2 - 2*t*(1-t))*c1 // (-9*t^2 + 6*t)*c2 = 3*(-3*t^2 + 2*t)*c2 = 3*(2*t*(1-t) - t^2)*c2 // 3*t^2*p2 Vector3 p = p1 * -3 * sqr_rest; p = p + c1 * 3 * (sqr_rest - 2 * t * rest); p = p + c2 * 3 * (2 * t * rest - sqr_t); p = p + p2 * 3 * sqr_t; return p; //p.GetNormalized(); }
参考
轻松理解牛顿迭代法且用其求平方根_newton 迭代法 求平方根-CSDN博客
方程的根和解的区别,方程:含有未知数的等式。使等式成立的未知数的值称为“解”或“根”

 浙公网安备 33010602011771号
浙公网安备 33010602011771号